考虑协作机器人的多工序作业调度问题的解决方法和装置
本发明涉及管理科学,尤其涉及一种考虑协作机器人的多工序作业调度问题的解决方法和装置。
背景技术:
1、众多智能制造发展方向中,协作机器人是重点研发领域之一。协作机器人作为新型工业机器人,充分发挥机器人的效率以及人类的智慧。
2、传统的车间调度问题在上世纪50年代被提出并逐渐受到广泛关注。在传统车间调度问题中,通过建立数学模型以及设计算法对机器的分配与作业生产顺序的优化来降低生产成本,提高生产效率。随着协作机器人引入生产车间中,协作机器人作为一种新的生产资源加入到生产系统中,同样需要合理分配以提升生产效率。
3、配备了具有生产功能的协作机器人的机器在加工一道工序时至多有三种模式可供选择:机器加工(传统模式)、协作机器人加工、协同加工;而没有协作机器人分配的机器则继续采取传统的加工模式。其中,仅由协作机器人加工的加工时间长于仅由机器加工的加工时间,协同加工的加工时间短于仅由机器加工的加工时间。协作机器人的分配与作业加工模式选择大大增加了多工序作业调度问题的复杂度,在此背景下,对于考虑协作机器人的多工序作业调度问题的高效求解有其重要意义。
技术实现思路
1、本发明提供了一种考虑协作机器人的多工序作业调度问题的解决方法和装置,用以解决考虑协作机器人的多工序作业调度问题。所述技术方案如下:
2、一方面,提供了一种考虑协作机器人的多工序作业调度问题的解决方法,包括:
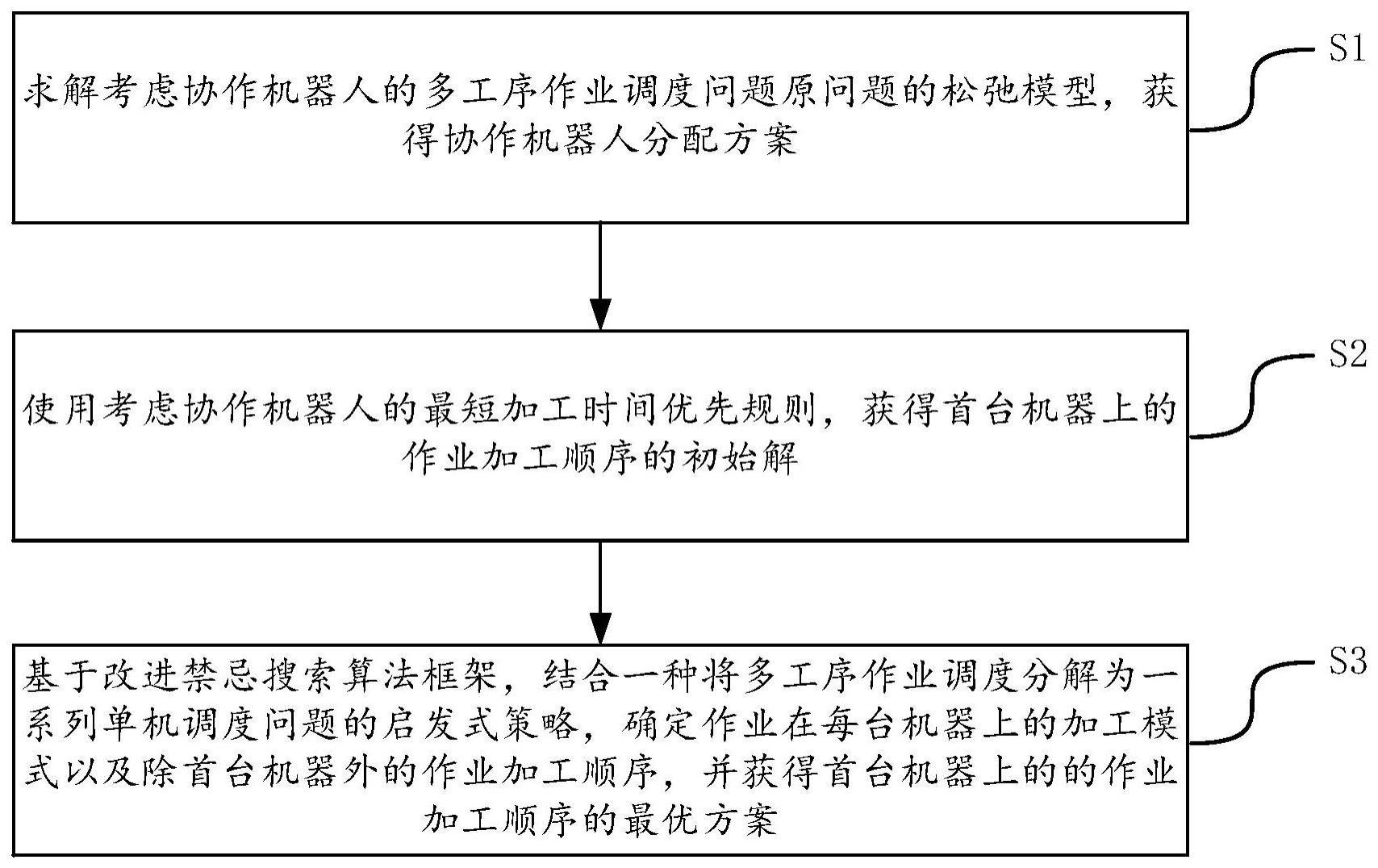
3、s1、求解考虑协作机器人的多工序作业调度问题原问题的松弛模型,获得协作机器人分配方案;
4、s2、使用考虑协作机器人的最短加工时间优先规则,获得首台机器上的作业加工顺序的初始解;
5、s3、基于改进禁忌搜索算法框架,结合一种将多工序作业调度分解为一系列单机调度问题的启发式策略,确定作业在每台机器上的加工模式以及除首台机器外的作业加工顺序,并获得首台机器上的作业加工顺序的最优方案。
6、另一方面,提供了一种考虑协作机器人的多工序作业调度问题的解决装置,包括:
7、协作机器人分配模块,用于求解考虑协作机器人的多工序作业调度问题原问题的松弛模型,获得协作机器人分配方案;
8、初始解获得模块,用于使用考虑协作机器人的最短加工时间优先规则,获得首台机器上的作业加工顺序的初始解;
9、最优方案获得模块,用于基于改进禁忌搜索算法框架,结合一种将多工序作业调度分解为一系列单机调度问题的启发式策略,确定作业在每台机器上的加工模式以及除首台机器外的作业加工顺序,并获得首台机器上的作业加工顺序的最优方案。
10、另一方面,提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现上述考虑协作机器人的多工序作业调度问题的解决方法。
11、另一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述考虑协作机器人的多工序作业调度问题的解决方法。
12、上述技术方案,与现有技术相比至少具有如下有益效果:
13、本发明通过对协作机器人的分配、作业加工顺序与作业加工模式选择进行合理决策,实现了对考虑协作机器人的多工序作业调度问题的高效求解,而且有助于填补当前领域的空白。
技术特征:
1.一种考虑协作机器人的多工序作业调度问题的解决方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述s1中求解考虑协作机器人的多工序作业调度问题原问题的松弛模型,获得协作机器人分配方案,具体包括:
3.根据权利要求2所述的方法,其特征在于,所述s2中使用考虑协作机器人的最短加工时间优先规则,获得首台机器上的作业加工顺序的初始解,具体包括:
4.根据权利要求3所述的方法,其特征在于,所述s3中的改进禁忌搜索算法框架,具体包括:
5.根据权利要求4所述的方法,其特征在于,所述目标值的计算采用结合一种将多工序作业调度分解为一系列单机调度问题的启发式策略,确定作业在每台机器上的加工模式以及除首台机器外的作业加工顺序,以及所述目标值,具体包括:
6.一种考虑协作机器人的多工序作业调度问题的解决装置,其特征在于,包括:
7.根据权利要求6所述的装置,其特征在于,所述协作机器人分配模块,具体用于:
8.根据权利要求7所述的装置,其特征在于,所述初始解获得模块,具体用于:
9.根据权利要求8所述的装置,其特征在于,所述最优方案获得模块,具体用于:
10.根据权利要求9所述的装置,其特征在于,所述目标值的计算采用结合一种将多工序作业调度分解为一系列单机调度问题的启发式策略,确定作业在每台机器上的加工模式以及除首台机器外的作业加工顺序,以及所述目标值,具体包括:
技术总结
本发明涉及管理科学技术领域,尤其涉及一种考虑协作机器人的多工序作业调度问题的解决方法和装置,包括:S1、求解考虑协作机器人的多工序作业调度问题原问题的松弛模型,获得协作机器人分配方案;S2、使用考虑协作机器人的最短加工时间优先规则,获得首台机器上的作业加工顺序的初始解;S3、基于改进禁忌搜索算法框架,结合一种将多工序作业调度分解为一系列单机调度问题的启发式策略,确定作业在每台机器上的加工模式以及除首台机器外的作业加工顺序,并获得首台机器上的作业加工顺序的最优方案。本发明可以处理不同类型的考虑协作机器人的多工序作业调度问题。
技术研发人员:毛照昉,杨礼铭,黄典,方侃
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!