一种骑行数据检测方法、装置、设备及介质与流程
本发明涉及数据处理,特别是涉及一种骑行数据检测方法、装置、设备及介质。
背景技术:
1、在骑行的运动场景下,用户在骑行过程中的急刹动作,由于惯性作用,身体和头部短时间内均会有前倾动作。由此,为了避免紧急情况下的急刹导致后方无法紧急避险的情况,用户一般会使用设置有惯性传感器的头戴式增强现实(augmented reality,ar)设备,采集惯性传感器传输的骑行数据,此时骑行数据为连续时序信号下的骑行数据。现有的对于连续时序信号下的骑行数据的检测,以便于确定急刹动作的方法一般为:采用滑窗采样的方式,对确定的各个滑窗中的骑行数据(确定得到的含有骑行数据的滑窗又可以称为gm粒子)进行检测,其中,将滑窗中的骑行数据直接与滑窗阈值比较,以确定急刹动作,但由于某些快速点头等头部动作会与急刹动作相似,且还存在部分头部或身体动作不明显的急刹动作,此时会造成误检测,使得确定急刹动作的准确性降低。
2、鉴于上述存在的问题,寻求如何避免误检测,以提高确定急刹动作的准确性是本领域技术人员竭力解决的问题。
技术实现思路
1、本发明的目的是提供一种骑行数据检测方法、装置、设备及介质,用于避免误检测,以提高确定急刹动作的准确性。
2、为解决上述技术问题,本发明提供一种骑行数据检测方法,应用于设置有惯性传感器的头戴式ar设备,包括:
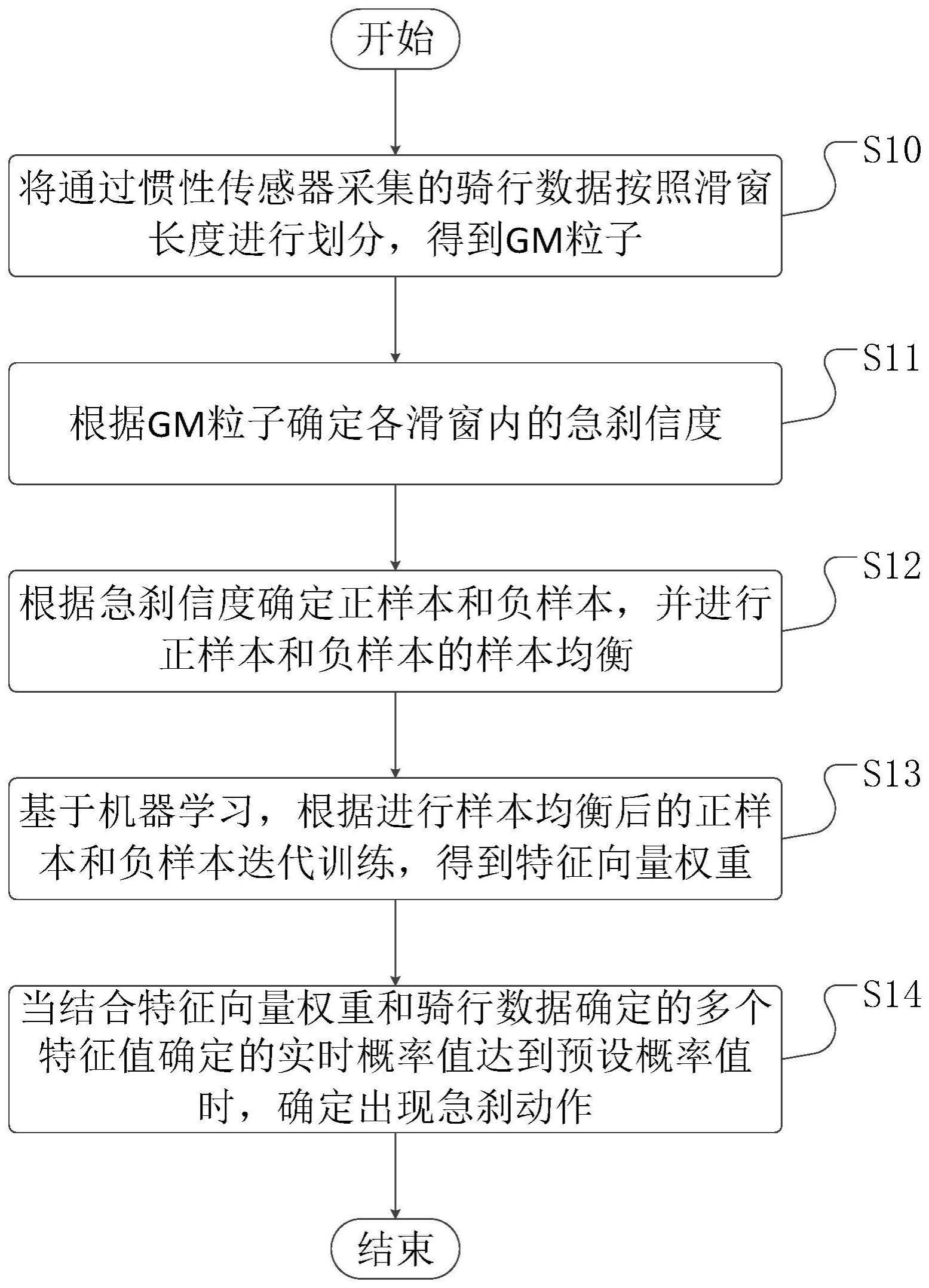
3、将通过惯性传感器采集的骑行数据按照滑窗长度进行划分,得到gm粒子,骑行数据至少包括加速度分量和角速度分量,gm粒子包括权重w、时间分布均值m、协方差p;
4、根据gm粒子确定各滑窗内的急刹信度;
5、根据急刹信度确定正样本和负样本,并进行正样本和负样本的样本均衡,其中,正样本为表征滑窗内出现急刹动作的gm粒子,负样本为表征滑窗内未出现急刹动作的gm粒子;
6、基于机器学习,根据进行样本均衡后的正样本和负样本迭代训练,得到特征向量权重;当结合特征向量权重和骑行数据确定的多个特征值确定的实时概率值达到预设概率值时,确定出现急刹动作。
7、另一方面,根据急刹信度确定正样本和负样本包括:
8、获取急刹标注结果,急刹标注结果为当出现表征急刹动作时进行标注得到标注结果;
9、判断急刹信度是否达到预设门限值;
10、若急刹信度未达到预设门限值,则删除表征急刹信度未达到预设门限值的gm粒子;
11、若急刹信度达到预设门限值,则判断gm粒子中是否存在急刹标注结果;
12、若gm粒子中存在急刹标注结果,则确定gm粒子为正样本;
13、若表征急刹信度达到预设门限值的gm粒子中不存在急刹标注结果,则确定gm粒子为负样本。
14、另一方面,基于机器学习,根据进行样本均衡后的正样本和负样本迭代训练,得到特征向量权重包括:
15、根据正样本和负样本建立特征矩阵;
16、对特征矩阵引入预测函数;
17、根据预测函数建立损失函数;
18、基于损失函数得到初始特征向量权重;
19、利用梯度下降法对初始特征向量权重迭代训练;
20、对初始特征向量权重迭代预设次数后,得到特征向量权重。
21、另一方面,将通过惯性传感器采集的骑行数据按照滑窗长度进行划分,得到gm粒子包括:
22、获取骑行数据的骑行数据长度以及预设步长值,预设步长值用于对骑行数据按照滑窗长度进行划分;
23、根据骑行数据长度、滑窗长度、预设步长值建立取整函数;
24、基于取整函数得到gm粒子。
25、另一方面,根据正样本和负样本建立特征矩阵包括:
26、基于机器学习的二分类问题,根据正样本和负样本建立特征矩阵。
27、另一方面,根据gm粒子确定各滑窗内的急刹信度包括:
28、依据预设条件选取预设个数的gm粒子作为待融合粒子;
29、根据待融合粒子对应的权重值进行更新融合,得到初始融合权重;
30、根据初始融合权重依次与其余gm粒子进行更新融合,得到最终融合权重;
31、根据最终融合权重确定急刹信度。
32、另一方面,在根据待融合粒子对应的权重值进行更新融合之后,还包括:
33、判断其余gm粒子是否均进行更新融合完毕;
34、若是,则进入得到初始融合权重的步骤;
35、若否,则返回至根据待融合粒子对应的权重值进行更新融合的步骤。
36、另一方面,在依据预设条件选取预设个数的gm粒子作为待融合粒子之后,在根据待融合粒子对应的权重值进行更新融合,得到初始融合权重之前,还包括:
37、建立笛卡尔直角坐标系;
38、基于笛卡尔直角坐标系对待融合粒子自适应排序。
39、为解决上述技术问题,本发明还提供了一种骑行数据检测装置,应用于设置有惯性传感器的头戴式ar设备,装置包括:
40、划分数据模块,用于将通过惯性传感器采集的骑行数据按照滑窗长度进行划分,得到gm粒子,骑行数据至少包括加速度分量和角速度分量;
41、第一确定模块,用于根据gm粒子确定各滑窗内的急刹信度;
42、确定并均衡模块,用于根据急刹信度确定正样本和负样本,并进行正样本和负样本的样本均衡,其中,正样本为表征滑窗内出现急刹动作的gm粒子,负样本为表征滑窗内未出现急刹动作的gm粒子;
43、迭代并得到模块,用于基于机器学习,根据进行样本均衡后的正样本和负样本迭代训练,得到特征向量权重;
44、第二确定模块,用于当结合特征向量权重和骑行数据确定的多个特征值确定的实时概率值达到预设概率值时,确定出现急刹动作。
45、此外,该装置还包括以下模块:
46、另一方面,根据急刹信度确定正样本和负样本包括:
47、获取并得到模块,用于获取急刹标注结果,急刹标注结果为当出现表征急刹动作时进行标注得到标注结果;
48、第一判断模块,用于判断急刹信度是否达到预设门限值;
49、若急刹信度未达到预设门限值,则触发删除模块,用于删除表征急刹信度未达到预设门限值的gm粒子;
50、若急刹信度达到预设门限值,则触发第二判断模块,用于判断gm粒子中是否存在急刹标注结果;
51、若gm粒子中存在急刹标注结果,则触发第三确定模块,用于确定gm粒子为正样本;
52、若表征急刹信度达到预设门限值的gm粒子中不存在急刹标注结果,则触发第四确定模块,用于确定gm粒子为负样本。
53、另一方面,基于机器学习,根据进行样本均衡后的正样本和负样本迭代训练,得到特征向量权重包括:
54、第一建立特征矩阵模块,用于根据正样本和负样本建立特征矩阵;
55、引入预测函数模块,用于对特征矩阵引入预测函数;
56、建立损失函数模块,用于根据预测函数建立损失函数;
57、第一得到模块,用于基于损失函数得到初始特征向量权重;
58、迭代训练模块,用于利用梯度下降法对初始特征向量权重迭代训练;
59、第二得到模块,用于对初始特征向量权重迭代预设次数后,得到特征向量权重。
60、另一方面,将通过惯性传感器采集的骑行数据按照滑窗长度进行划分,得到gm粒子包括:
61、获取模块,用于获取骑行数据的骑行数据长度以及预设步长值,预设步长值用于对骑行数据按照滑窗长度进行划分;
62、建立取整函数模块,用于根据骑行数据长度、滑窗长度、预设步长值建立取整函数;
63、第三得到模块,用于基于取整函数得到gm粒子。
64、另一方面,根据正样本和负样本建立特征矩阵包括:
65、第二建立特征矩阵模块,用于基于机器学习的二分类问题,根据正样本和负样本建立特征矩阵。
66、另一方面,根据gm粒子确定各滑窗内的急刹信度包括:
67、选取模块,用于依据预设条件选取预设个数的gm粒子作为待融合粒子;
68、第一更新融合模块,用于根据待融合粒子对应的权重值进行更新融合,得到初始融合权重;
69、第二更新融合模块,用于根据初始融合权重依次与其余gm粒子进行更新融合,得到最终融合权重;
70、第五确定模块,用于根据最终融合权重确定急刹信度。
71、另一方面,在根据待融合粒子对应的权重值进行更新融合之后,还包括:
72、第三判断模块,用于判断其余gm粒子是否均进行更新融合完毕;
73、若是,则进入得到初始融合权重的步骤;
74、若否,则返回至根据待融合粒子对应的权重值进行更新融合的步骤。
75、另一方面,在依据预设条件选取预设个数的gm粒子作为待融合粒子之后,在根据待融合粒子对应的权重值进行更新融合,得到初始融合权重之前,还包括:
76、建立模块,用于建立笛卡尔直角坐标系;
77、自适应排序模块,用于基于笛卡尔直角坐标系对待融合粒子自适应排序。
78、为解决上述技术问题,本发明还提供了一种骑行数据检测设备,包括:
79、存储器,用于存储计算机程序;
80、处理器,用于指向计算机程序,实现骑行数据检测方法的步骤。
81、为解决上述技术问题,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时,实现上述全部骑行数据检测方法的步骤。
82、本发明所提供的一种骑行数据检测方法,应用于设置有惯性传感器的头戴式ar设备,包括:将通过惯性传感器采集的骑行数据按照滑窗长度进行划分,得到gm粒子,骑行数据至少包括加速度分量和角速度分量;根据gm粒子确定各滑窗内的急刹信度;根据急刹信度确定正样本和负样本,并进行正样本和负样本的样本均衡,其中,正样本为表征滑窗内出现急刹动作的gm粒子,负样本为表征滑窗内未出现急刹动作的gm粒子;将现有技术中将滑窗中的骑行数据直接与滑窗阈值比较确定急刹动作的技术方案替换为根据gm粒子确定各滑窗内的急刹信度;并依据急刹信度对正样本和负样本进行样本均衡,此时避免了由于某些快速点头等头部动作会与急刹动作相似和部分头部或身体动作不明显的急刹动作造成的误检测;基于机器学习对正样本和负样本的迭代并得到特征向量权重,当结合特征向量权重和骑行数据确定的多个特征值确定的实时概率值达到预设概率值时,确定出现急刹动作,此时更进一步避免了由于某些快速点头等头部动作会与急刹动作相似和部分头部或身体动作不明显的急刹动作造成的确定急刹动作的准确性降低的问题。以此实现了避免误检测的同时,提高了确定急刹动作的准确性。
83、本发明还提供了一种骑行数据检测装置、设备及介质,效果同上。
- 还没有人留言评论。精彩留言会获得点赞!