用于排土机的防撞控制方法及其系统与流程
本发明涉及智能控制技术,尤其涉及一种用于排土机的防撞控制方法及其系统。
背景技术:
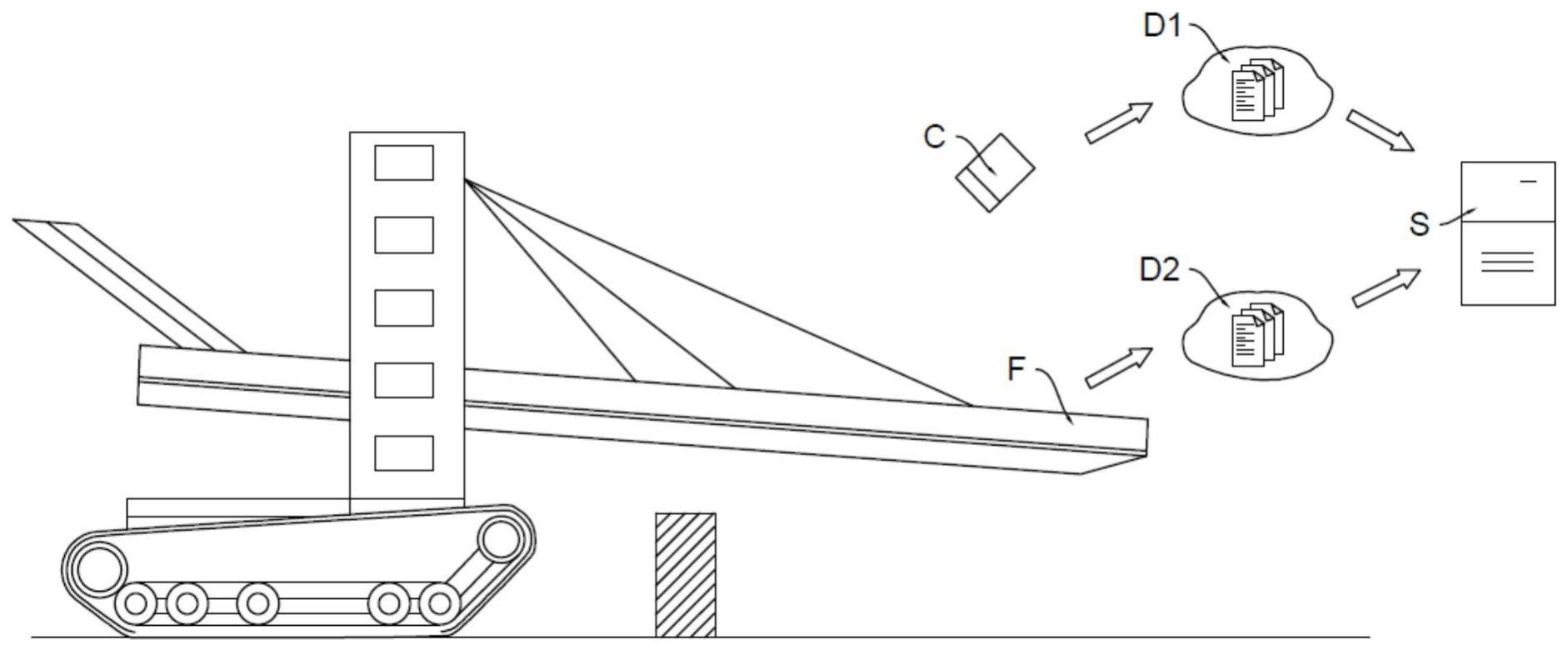
1、排土机是通过回转排料臂上的带式输送机排弃废石的自行式设备。它是露天矿连续或半连续运输开采工艺的配套辅助设备,位于排土运输系统的终端,废石由受料臂的受料端经臂上带式输送机转运到排料臂,再经臂上带式输送机排弃到废石场。受料臂的回转是由履带行走机构通过一侧履带不动,另一侧履带转动调整方向。
2、目前,排土机在正常工作以及需要进行移动或调整排料位置时,大部分都是依靠人工来进行排土机的控制,但是人工控制调整存在视觉盲区,并且由于排土机中的受料臂和排料臂的尺寸过长,这将导致当排土机与其余物体相距较近时,操作人员很难及时做出反应,进而导致排土机受到碰撞而损坏排土机设备,影响工程的进度。
技术实现思路
1、本发明的目的在于提供一种用于排土机的防撞控制方法及其系统,以在排土机将发生碰撞时由控制系统控制产生防撞预警,避免撞击事故的发生。
2、以下给出一个或多个方面的简要概述以提供对这些方面的基本理解。此概述不是所有构想到的方面的详尽综览,并且既非旨在指认出所有方面的关键性或决定性要素亦非试图界定任何或所有方面的范围。其唯一的目的是要以简化形式给出一个或多个方面的一些概念以为稍后给出的更加详细的描述之序。
3、根据本发明的一方面,提供了一种用于排土机的防撞控制方法,其包括:
4、通过由部署于排土机的测距仪采集的预定时间段内多个预定时间点的距离测量值以及所述排土机的多个预定时间点的运动参数;
5、将所述预定时间段内多个预定时间点的距离测量值按照时间维度排列为距离测量输入向量后通过第一多尺度邻域特征提取模块以得到多尺度距离特征向量;
6、将所述排土机的多个预定时间点的运动参数按照时间维度排列为运动参数输入向量后通过第二多尺度邻域特征提取模块以得到多尺度运动特征向量;
7、使用高斯密度图来融合所述多尺度距离特征向量和所述多尺度运动特征向量以得到融合高斯密度图;
8、对所述融合高斯密度图的各个位置的高斯分布进行高斯离散化以得到分类特征矩阵;
9、对所述分类特征矩阵进行特征分布校正以得到校正后分类特征矩阵;和
10、将所述校正后分类特征矩阵通过分类器以得到分类结果,所述分类结果用于表示是否产生防撞预警提示。
11、在上述的用于排土机的防撞控制方法中,所述将所述预定时间段内多个预定时间点的距离测量值按照时间维度排列为距离测量输入向量后通过第一多尺度邻域特征提取模块以得到多尺度距离特征向量,包括:
12、将所述距离测量输入向量输入所述第一多尺度邻域特征提取模块的第一卷积层以得到第一尺度距离特征向量,其中,所述第一卷积层具有第一长度的第一一维卷积核;
13、将所述距离测量输入向量输入所述第一多尺度邻域特征提取模块的第二卷积层以得到第二尺度距离特征向量,其中,所述第二卷积层具有第二长度的第二一维卷积核,所述第一长度不同于所述第二长度;以及
14、使用所述第一多尺度邻域特征提取模块的级联层将所述第一尺度距离特征向量和所述第二尺度距离特征向量进行级联以得到所述多尺度距离特征向量。
15、在上述的用于排土机的防撞控制方法中,所述将所述距离测量输入向量输入所述第一多尺度邻域特征提取模块的第一卷积层以得到第一尺度距离特征向量,进一步包括:使用所述第一多尺度邻域特征提取模块的第一卷积层以如下公式对所述距离测量输入向量进行一维卷积编码以得到所述第一尺度距离特征向量;
16、其中,所述公式为:
17、
18、其中,a为第一一维卷积核在x方向上的宽度、f(a)为第一一维卷积核参数向量、g(x-a)为与卷积核函数运算的局部向量矩阵,w为第一一维卷积核的尺寸,x表示所述距离测量输入向量。
19、在上述的用于排土机的防撞控制方法中,所述将所述距离测量输入向量输入所述第一多尺度邻域特征提取模块的第二卷积层以得到第二尺度距离特征向量,进一步包括:使用所述第一多尺度邻域特征提取模块的第二卷积层以如下公式对所述距离测量输入向量进行一维卷积编码以得到所述第二尺度距离特征向量;
20、其中,所述公式为:
21、
22、其中,b为第二一维卷积核在x方向上的宽度、f(b)为第二一维卷积核参数向量、g(x-b)为与卷积核函数运算的局部向量矩阵,m为第二一维卷积核的尺寸,x表示所述距离测量输入向量。
23、在上述的用于排土机的防撞控制方法中,进一步包括:使用高斯密度图来融合所述多尺度距离特征向量和所述多尺度运动特征向量以得到融合高斯密度图;
24、其中,所述公式为:
25、
26、其中μ表示所述多尺度距离特征向量和所述多尺度运动特征向量之间的按位置均值向量,且σ的每个位置的值表示所述多尺度距离特征向量和所述多尺度运动特征向量中各个位置的特征值之间的方差。
27、在上述的用于排土机的防撞控制方法中,所述对所述融合高斯密度图的各个位置的高斯分布进行高斯离散化以得到分类特征矩阵,包括:
28、对所述融合高斯密度图的各个位置的高斯分布进行高斯离散化以得到多个行向量;以及
29、将所述多个行向量进行二维排列以得到所述分类特征矩阵。
30、在上述的用于排土机的防撞控制方法中,所述对所述分类特征矩阵进行特征分布校正以得到校正后分类特征矩阵,包括:
31、以如下公式对所述分类特征矩阵进行特征分布校正以得到所述校正后分类特征矩阵;
32、其中,所述公式为:
33、
34、其中m′和m分别为所述分类特征矩阵和所述校正后分类特征矩阵,relu(·)表示relu激活函数,表示矩阵相乘,且分子矩阵和分母矩阵之间的除法为矩阵特征值的按位置相除,exp(·)表示矩阵的指数运算,所述矩阵的指数运算表示计算以矩阵中各个位置的特征值为幂的自然指数函数值。
35、在上述的用于排土机的防撞控制方法中,所述将所述校正后分类特征矩阵通过分类器以得到分类结果,所述分类结果用于表示是否产生防撞预警提示,包括:
36、将所述校正后分类特征矩阵按照行向量或列向量展开为分类特征向量;
37、使用所述分类器的全连接层对所述分类特征向量进行全连接编码以得到编码分类特征向量;以及
38、将所述编码分类特征向量输入所述分类器的softmax分类函数以得到所述分类结果。
39、根据本技术的另一方面,提供了一种用于排土机的防撞控制系统,其包括:
40、数据获取模块,用于通过由部署于排土机的测距仪采集的预定时间段内多个预定时间点的距离测量值以及所述排土机的多个预定时间点的运动参数;
41、第一多尺度邻域特征提取模块,用于将所述预定时间段内多个预定时间点的距离测量值按照时间维度排列为距离测量输入向量后通过第一多尺度邻域特征提取模块以得到多尺度距离特征向量;
42、第二多尺度邻域特征提取模块,用于将所述排土机的多个预定时间点的运动参数按照时间维度排列为运动参数输入向量后通过第二多尺度邻域特征提取模块以得到多尺度运动特征向量;
43、融合模块,用于使用高斯密度图来融合所述多尺度距离特征向量和所述多尺度运动特征向量以得到融合高斯密度图;
44、高斯离散化模块,用于对所述融合高斯密度图的各个位置的高斯分布进行高斯离散化以得到分类特征矩阵;
45、特征分布校正模块,用于对所述分类特征矩阵进行特征分布校正以得到校正后分类特征矩阵;和
46、分类结果生成模块,用于将所述校正后分类特征矩阵通过分类器以得到分类结果,所述分类结果用于表示是否产生防撞预警提示。
47、在上述的用于排土机的防撞控制系统中,所述第一多尺度邻域特征提取模块,包括:
48、第一尺度特征提取单元,用于将所述距离测量输入向量输入所述第一多尺度邻域特征提取模块的第一卷积层以得到第一尺度距离特征向量,其中,所述第一卷积层具有第一长度的第一一维卷积核;
49、第二尺度特征提取单元,用于将所述距离测量输入向量输入所述第一多尺度邻域特征提取模块的第二卷积层以得到第二尺度距离特征向量,其中,所述第二卷积层具有第二长度的第二一维卷积核,所述第一长度不同于所述第二长度;以及
50、多尺度级联单元,用于使用所述第一多尺度邻域特征提取模块的级联层将所述第一尺度距离特征向量和所述第二尺度距离特征向量进行级联以得到所述多尺度距离特征向量。
51、本发明实施例的有益效果是:本技术提供的用于排土机的防撞控制方法及其系统,其首先将采集的预定时间段内多个预定时间点的距离测量值排列后通过第一多尺度邻域特征提取模块以得到多尺度距离特征向量,接着,将多个预定时间点的运动参数排列后通过第二多尺度邻域特征提取模块以得到多尺度运动特征向量,然后,将使用高斯密度图融合所述多尺度距离特征向量和所述多尺度运动特征向量得到的融合高斯密度图进行高斯离散化以得到分类特征矩阵,最后,对所述分类特征矩阵进行特征分布校正后通过分类器以得到用于表示是否产生防撞预警提示的分类结果。通过这样的方式,可以在排土机将发生碰撞时由控制系统控制产生防撞预警,以避免撞击事故的发生。
- 还没有人留言评论。精彩留言会获得点赞!