一种面向无人值守场景的多无人平台协同决策方法
本发明涉及无人系统领域,具体是一种面向无人值守场景的多无人平台协同决策方法。
背景技术:
1、随着科技的进步,无人技术得到快速发展,高智能化的无人平台应运而生,为各个行业领域带来了革命性变革。在实际应用过程中,单一种类的无人平台因工作方式、工作空间、搭载传感器等因素限制,无法完成多样复杂的任务,因此多种无人系统之间相互协同、交叉使用、跨域协同逐渐成为无人系统技术与运用的新的研究方向。
2、无人值守是将地面无人平台、空中无人平台和地面无人值守传感器相结合,多无人平台跨域协同工作,共同完成探测、搜索、跟踪等重点区域的防御值守任务。无人值守系统作为无人系统的应用形式之一,在工业与民用领域得到广泛应用。目前,无人值守系统主要用于重要区域的辅助监控、设备故障隔离、巡视告警等目的,而对于监视结果缺乏一定的处置措施,系统具有一定的被动性。
3、现有的国内外对无人值守系统决策推理技术建模方法主要包括知识驱动方法和数据驱动方法两大类。其中,基于知识驱动的建模方式主要是从先验知识和已有的模型分析对任务决策进行建模,但是单纯的知识建模方法难以应对动态不确定环境下的复杂无人值守任务环境;基于数据驱动的建模方式则是提取无人值守系统中的特征数据信息来对决策进行建模,但现有基于数据驱动的建模方法存在模型可解释性不足和泛化能力较差的问题。
技术实现思路
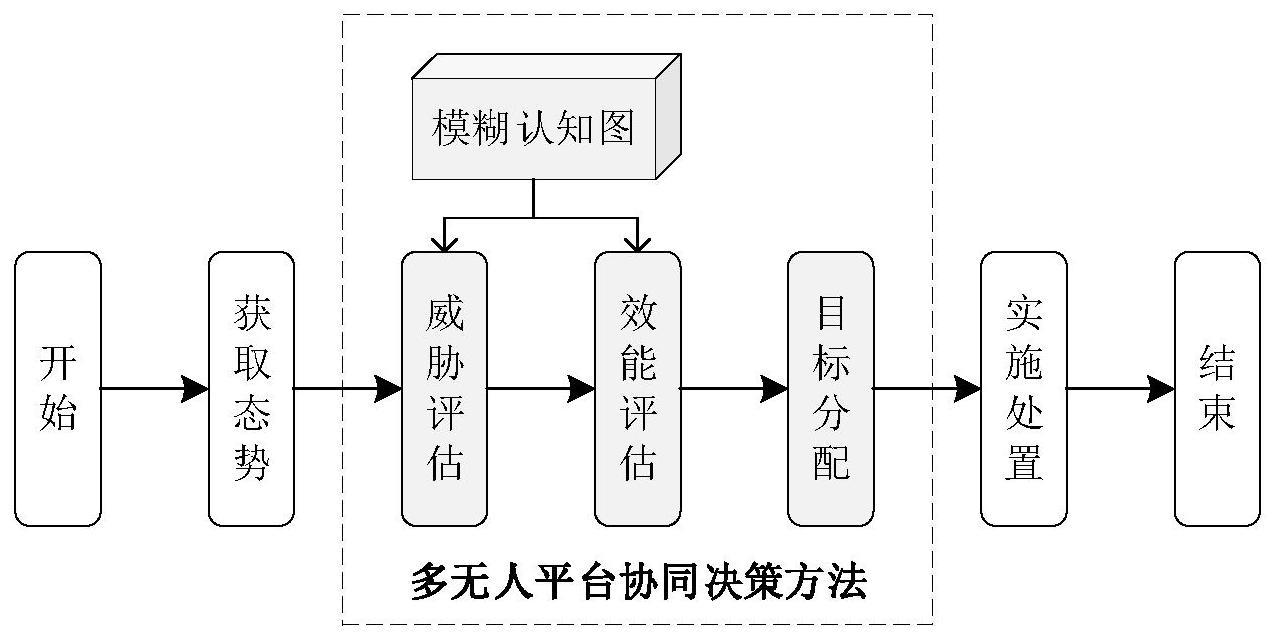
1、针对目前无人值守系统决策推理建模方法存在的难以应对动态不确定环境下的复杂无人值守任务环境和模型可解释性不足且泛化能力较差的问题,本发明提出了一种面向无人值守场景的多无人平台协同决策方法,通过获取无人值守场景的态势信息,基于模糊认知图理论方法对态势信息进行分析,建立目标威胁评估模型、效能评估模型和目标分配模型,完成对目标的多无人平台智能协同决策。该方法结合了先验知识与数据算法的优势,提高算法效率、降低算力要求,同时使得系统具有良好的鲁棒性、可解释性和泛化能力。
2、本发明的技术方案是:
3、一种面向无人值守场景的多无人平台协同决策方法,其特殊之处在于包括以下步骤:
4、步骤1,实时获取我方无人平台和目标无人平台的态势信息;
5、步骤2,根据所获取的态势信息建立基于fcm的目标威胁评估模型,所述目标威胁评估模型包括目标类型量化值c1、目标位置优势量化值c2、目标运动优势量化值c3、目标协同优势量化值c4、目标载荷优势量化值c5、我方平台健康度量化值c6、目标意图量化值c7和目标威胁度量化值c8,
6、各量化值通过以下方式确定:
7、(1)目标类型量化值c1根据目标无人平台的类型和威胁程度确定;
8、(2)目标位置优势量化值c2为目标无人平台由当前位置向我方无人平台运动的优势的量化值,根据公式
9、
10、确定,其中ep为目标无人平台的目标位置优势式中,d为目标无人平台入侵我方区域的总路程,dr为当前时刻目标无人平台距离我方区域的剩余路程,ed为目标无人平台的目标距离优势式中,rattack为目标无人平台的武器攻击距离,rm为我方无人平台的武器攻击距离,rdetect是我方无人平台的最大搜索距离;
11、(3)目标运动优势量化值c3根据公式
12、
13、确定,其中vf为我方无人平台的速度,vt为目标无人平台的速度;
14、(4)目标协同优势量化值c4根据公式
15、
16、确定,其中nr为接收节点数目,nt为发送节点数目,mt为节点发送的消息量,mr为节点接收的消息量;
17、(5)目标载荷优势量化值c5根据公式
18、
19、确定,其中n为武器类型的数量,r1i表示武器的杀伤半径,r2i表示武器的命中精度,mi为第i种武器类型的数量;
20、(6)我方平台健康度量化值c6根据公式
21、c6=ωe·ee+ωw·ew确定,其中ee和ew分别表示剩余电量健康度和武器载荷健康度,ωe和ωw分别表示剩余电量健康度和武器载荷健康度对应的权重,且ωe+ωw=1,
22、剩余电量健康度为ee=ωeteet+ωereer+ωeeeee,式中,eet为我方无人平台执行任务所需电量,eer为我方无人平台返航所需电量,eee为我方无人平台剩余电量,ωet、ωer和ωee为对应的权重,且ωet+ωer+ωee=1,
23、武器载荷健康度为式中,nw为我方无人平台最大武器载荷数量,nw为我方无人平台当前剩余武器载荷数量;
24、(7)目标意图量化值c7根据公式
25、
26、确定,其中cj(t)表示在t时刻的目标类型量化值、目标位置优势量化值、目标运动优势量化值、目标协同优势量化值、目标载荷优势量化值和我方平台健康度量化值,w1ji表示分别与各量化值对应的权重,f(·)表示目标威胁评估模型的激活函数;
27、(8)目标威胁度量化值c8根据公式
28、
29、确定,其中ck(t)表示在t时刻的目标类型量化值、目标位置优势量化值、目标运动优势量化值、目标协同优势量化值、目标载荷优势量化值、我方平台健康度量化值和目标意图量化值,w1ji表示分别与各量化值对应的权重,f(·)表示目标威胁评估模型的激活函数;
30、步骤3,根据所获取的态势信息和所建立的目标威胁评估模型建立基于fcm的效能评估模型,效能评估模型包括目标类型量化值c11、目标意图量化值c12、目标威胁度量化值c13、目标优势量化值c14、我方平台类型量化值c15、我方平台优势量化值c16和目标效能值c17,
31、各量化值通过以下方式确定:
32、(1)目标类型量化值为c11=c1;
33、(2)目标意图量化值为c12=c7;
34、(3)目标威胁度量化值为c13=c8;
35、(4)目标优势量化值根据公式
36、c14(t+1)=0.3×c14-1(t)+0.5×c14-2(t)+0.2×c14-3(t)
37、确定,其中c14-1表示目标行进方向量化值,c14-2表示目标与核心区域的距离式中,dtr为目标无人平台与我方区域的距离,dtmax为目标无人平台入侵我方区域的总路程,c14-3表示目标速度式中,vt为目标当前速度,vtmax为目标最大速度;
38、(5)我方平台类型量化值根据我方无人平台的具体类型确定;
39、(6)我方平台优势量化值根据公式
40、
41、确定,其中c16-1表示我方无人平台与目标无人平台距离式中,do为我方无人平台与目标无人平台的距离,domax为我方无人平台与目标无人平台的最大距离,c16-2表示我方无人平台速度式中,vo为我方无人平台当前速度,vomax为我方无人平台最大速度;
42、(7)目标效能值根据公式
43、
44、确定,其中cm(t)表示在t时刻的目标类型量化值、目标意图量化值、目标威胁度量化值、目标优势量化值、我方平台类型量化值和我方平台优势量化值,w2ji表示分别与各量化值对应的权重,f(·)表示效能评估模型的激活函数;
45、步骤4,根据所建立的效能评估模型建立目标分配模型,以确定我方无人平台与目标无人平台之间的目标分配数据;
46、步骤5,根据所确定的目标分配数据实施我方无人平台对目标无人平台的打击处置。
47、进一步地,目标无人平台的类型分为人、车和无人机,并且目标类型量化值分别对应地为0.3、0.6和0.7。
48、进一步地,我方无人平台的类型分为无人车和无人机,并且我方平台类型量化值分别对应地为0.6和0.4。
49、进一步地,目标行进方向分为前进、停止、后退,并且目标行进方向量化值分别对应地为0.6、0.3和0.1。
50、进一步地,ωe取为0.3,ωw取为0.7。
51、进一步地,ωet取为0.4,ωer取为0.2,ωee取为0.4。
52、进一步地,w1ji取为:
53、
54、进一步地,w2ji取为:
55、
56、进一步地,目标意图量化值被根据大小而将目标无人平台的意图判定为误入意图、入侵意图、佯攻意图或攻击意图中的一者。
57、进一步地,目标意图量化值是被基于三角形隶属函数使用四个阈值对目标无人平台的意图进行判定的。
58、本发明的有益效果是:
59、本发明的面向无人值守场景的多无人平台协同决策方法,通过获取无人值守场景的态势信息并实时理解特定值守场景的攻防博弈态势,利用结合先验知识驱动方法与数据驱动方法的模糊认知图建立目标威胁评估模型、效能评估模型和目标分配模型来完成多无人平台的智能协同决策算法并据此快速制定相应的处置策略,使得能够应对动态不确定环境下的复杂无人值守任务环境,在有效地提高任务执行效率的同时,使得决策模型具备良好的鲁棒性、可解释性和泛化能力。
- 还没有人留言评论。精彩留言会获得点赞!