港口目标定位方法、装置、电子设备及存储介质与流程
所属的技术人员能够理解,本发明的各个方面可以实现为系统、方法或程序产品。因此,本发明的各个方面可以具体实现为以下形式,即:完全的硬件实施方式、完全的软件实施方式(包括固件、微代码等),或硬件和软件方面结合的实施方式,这里可以统称为“电路”、“模块”或“系统”。下面参照图10来描述根据本发明的这种实施方式的电子设备600。图10显示的电子设备600仅仅是一个示例,不应对本发明实施例的功能和使用范围带来任何限制。如图10所示,电子设备600以通用计算设备的形式表现。电子设备600的组件可以包括但不限于:至少一个处理单元610、至少一个存储单元620、连接不同系统组件(包括存储单元620和处理单元610)的总线630、显示单元640等。其中,所述存储单元存储有程序代码,所述程序代码可以被所述处理单元610执行,使得所述处理单元610执行本说明书上述港口目标定位方法部分中描述的根据本发明各种示例性实施方式的步骤。例如,所述处理单元610可以执行如图1中所示的步骤。所述存储单元620可以包括易失性存储单元形式的可读介质,例如随机存取存储单元(ram)6201和/或高速缓存存储单元6202,还可以进一步包括只读存储单元(rom)6203。所述存储单元620还可以包括具有一组(至少一个)程序模块6205的程序/实用工具6204,这样的程序模块6205包括但不限于:操作系统、一个或者多个应用程序、其它程序模块以及程序数据,这些示例中的每一个或某种组合中可能包括网络环境的实现。总线630可以为表示几类总线结构中的一种或多种,包括存储单元总线或者存储单元控制器、外围总线、图形加速端口、处理单元或者使用多种总线结构中的任意总线结构的局域总线。电子设备600也可以与一个或多个外部设备700(例如键盘、指向设备、蓝牙设备等)通信,还可与一个或者多个使得租户能与该电子设备600交互的设备通信,和/或与使得该电子设备600能与一个或多个其它计算设备进行通信的任何设备(例如路由器、调制解调器等等)通信。这种通信可以通过输入/输出(i/o)接口650进行。并且,电子设备600还可以通过网络适配器660与一个或者多个网络(例如局域网(lan),广域网(wan)和/或公共网络,例如因特网)通信。网络适配器660可以通过总线630与电子设备600的其它模块通信。应当明白,尽管图中未示出,可以结合电子设备600使用其它硬件和/或软件模块,包括但不限于:微代码、设备驱动器、冗余处理单元、外部磁盘驱动阵列、raid系统、磁带驱动器以及数据备份存储系统等。通过以上的实施方式的描述,本领域的技术人员易于理解,这里描述的示例实施方式可以通过软件实现,也可以通过软件结合必要的硬件的方式来实现。因此,根据本公开实施方式的技术方案可以以软件产品的形式体现出来,该软件产品可以存储在一个非易失性存储介质(可以是cd-rom,u盘,移动硬盘等)中或网络上,包括若干指令以使得一台计算设备(可以是个人计算机、服务器、或者网络设备等)执行根据本公开实施方式的上述港口目标定位方法。相比现有技术,本发明的优势在于:通过摄像模块实时采集图像帧中,选取所述目标对象的定位点,基于仿射矩阵将所述定位点映射至地图数据中,以获得所述目标对象的定位信息。由此,本技术在硬件上采用纯视觉的方式实现实时高精度定位,简单高效,摄像模块的覆盖范围广,成本低。在定位算法上结合视觉数据和地图数据,以结合仿射矩阵变换来实现目标对象自视觉数据向地图数据的映射来达到定位的目的,整个过程简单高效,资源消耗少。本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本公开的其它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由所附的权利要求指出。
背景技术:
1、目前,定位技术常常采用激光雷达或者激光和视觉融合来实现,在智慧城市,智慧园区,智慧港口等多种场景,对目标的定位是非常重要也是非常基础的功能。然而,由于港口环境较为简单,采用激光雷达合作和激光和视觉融合实现港口定位成本较高,且算法较为复杂。
2、由此,如何在港口定位中降低定位成本和算法所需资源消耗,是本领域技术人员亟待解决的技术问题。
技术实现思路
1、本发明为了克服上述现有技术存在的缺陷,提供一种港口目标定位方法、装置、电子设备及存储介质,以在港口定位中降低定位成本和算法所需资源消耗。
2、根据本发明的一个方面,提供一种港口目标定位方法,包括:
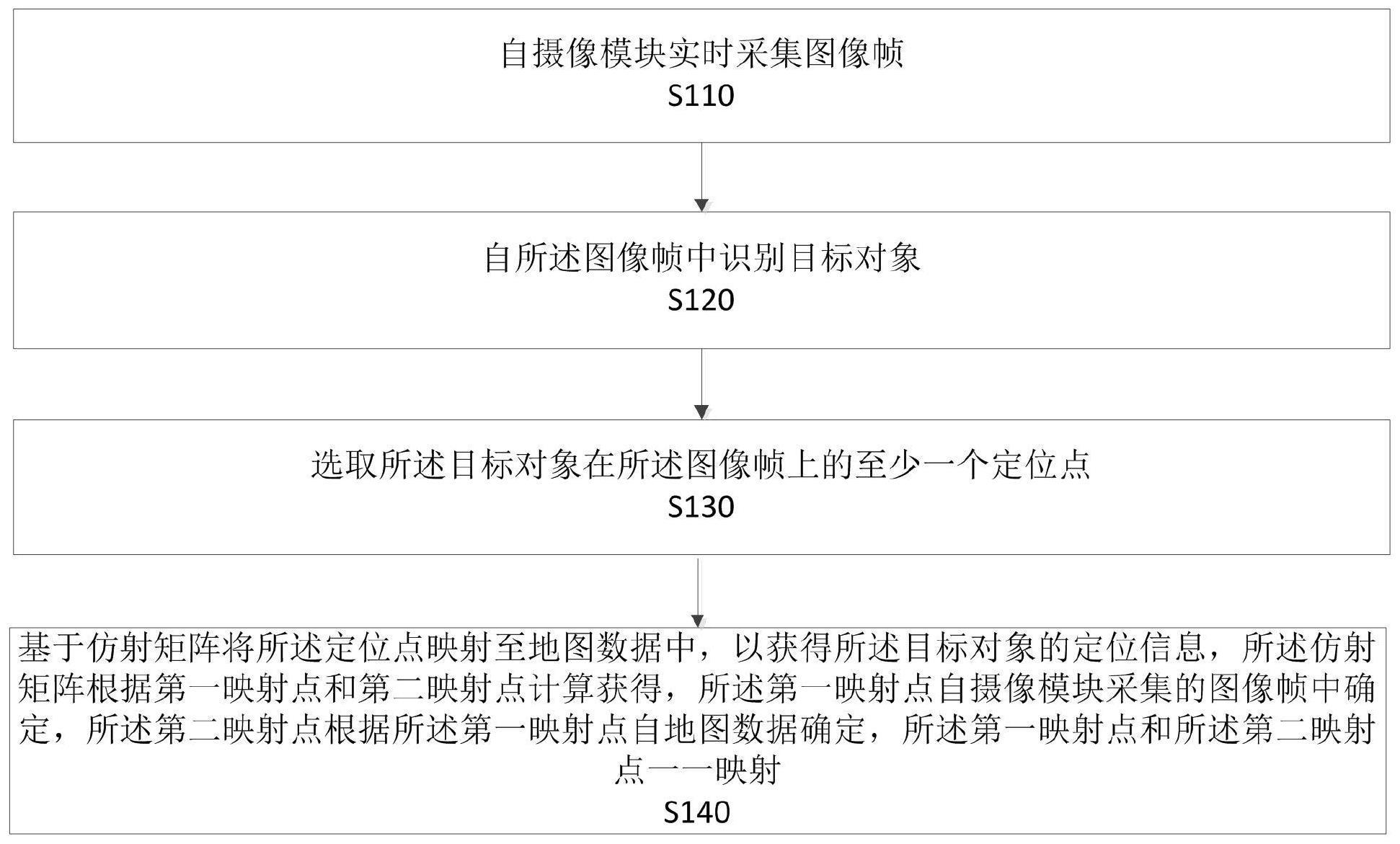
3、自摄像模块实时采集图像帧;
4、自所述图像帧中识别目标对象;
5、选取所述目标对象在所述图像帧上的至少一个定位点;
6、基于仿射矩阵将所述定位点映射至地图数据中,以获得所述目标对象的定位信息,所述仿射矩阵根据第一映射点和第二映射点计算获得,所述第一映射点自摄像模块采集的图像帧中确定,所述第二映射点根据所述第一映射点自地图数据确定,所述第一映射点和所述第二映射点一一映射。
7、在本技术的一些实施例中,所述地图数据为所述高精地图的定位区域内的地图图片,所述定位区域根据所述摄像模块的拍摄视角自高精地图中确定。
8、在本技术的一些实施例中,所述基于仿射矩阵将所述定位点映射至地图数据中,以获得所述目标对象的定位信息包括:
9、基于仿射矩阵将所述定位点映射至地图数据中,以获得所述目标对象在所述地图数据中的坐标;
10、根据所述地图数据在所述高精地图的比例尺信息,获得所述目标对象在所述高精地图中的坐标。
11、在本技术的一些实施例中,所述选取所述目标对象在所述图像帧上的至少一个定位点包括:
12、识别所述图像帧中的道路平面;
13、获取所述图像帧中所述目标对象接触所述道路平面的至少一个着地点;
14、将所述着地点作为所述定位点。
15、在本技术的一些实施例中,所述获取所述图像帧中所述目标对象接触所述道路平面的至少一个着地点包括:
16、获取所述图像帧中所述目标对象接触所述道路平面的着地线;
17、将所述着地线的顶点作为所述着地点。
18、在本技术的一些实施例中,所述选取所述目标对象在所述图像帧上的至少一个定位点包括:
19、获取所述目标对象在所述图像帧上的目标框;
20、将所述目标框的底边的中心点作为所述定位点。
21、在本技术的一些实施例中,所述第一映射点根据如下步骤确定:
22、自所述摄像模块采集的图像帧中识别道路平面;
23、根据所述道路平面识别所述图像帧中的道路边界;
24、将所述图像帧中,道路边界的四个角点作为所述第一映射点。
25、在本技术的一些实施例中,所述将所述图像帧中,道路边界的四个角点作为所述第一映射点包括:
26、响应于所述道路边界的至少一个角点被遮挡,基于所述道路边界的未被遮挡的角点确定被遮挡的所述角点在所述图像帧中的位置。
27、在本技术的一些实施例中,所述将所述图像帧中,道路边界的四个角点作为所述第一映射点包括:
28、响应于所述道路边界的至少一个角点被遮挡,沿道路行驶方向查找被遮挡的角点所在边的未被遮挡边界点;
29、将所述未被遮挡的边界点作为更新的角点;
30、根据所述更新的角点重新确定相对边的对应角点。
31、在本技术的一些实施例中,所述第二映射点根据如下步骤确定:
32、自所述图像帧中识别包含所述第一映射点的特征对象;
33、自所述地图数据中识别所述特征对象;
34、根据所述第一映射点与所述特征对象的位置关系,自所述地图数据中确定所述第二映射点。
35、在本技术的一些实施例中,所述摄像模块设置在港口设备上以使得所述摄像模块以俯视视角采集港口道路的视频或图像。
36、在本技术的一些实施例中,所述摄像模块以俯视视角采集的港口道路的视频或图像复用于进行目标对象的识别和定位。
37、根据本技术的又一方面,还提供一种港口目标定位装置,包括:
38、实时采集模块,用于自摄像模块实时采集图像帧;
39、目标对象识别模块,用于自所述图像帧中识别目标对象;
40、定位点选取模块,用于选取所述目标对象在所述图像帧上的至少一个定位点;
41、映射模块,用于基于仿射矩阵将所述定位点映射至地图数据中,以获得所述目标对象的定位信息,所述仿射矩阵根据第一映射点和第二映射点计算获得,所述第一映射点自摄像模块采集的图像帧中确定,所述第二映射点根据所述第一映射点自地图数据确定,所述第一映射点和所述第二映射点一一映射。
42、根据本发明的又一方面,还提供一种电子设备,所述电子设备包括:处理器;存储介质,其上存储有计算机程序,所述计算机程序被所述处理器运行时执行如上所述的步骤。
43、根据本发明的又一方面,还提供一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如上所述的步骤。
44、相比现有技术,本发明的优势在于:
45、通过摄像模块实时采集图像帧中,选取所述目标对象的定位点,基于仿射矩阵将所述定位点映射至地图数据中,以获得所述目标对象的定位信息。由此,本技术在硬件上采用纯视觉的方式实现实时高精度定位,简单高效,摄像模块的覆盖范围广,成本低。在定位算法上结合视觉数据和地图数据,以结合仿射矩阵变换来实现目标对象自视觉数据向地图数据的映射来达到定位的目的,整个过程简单高效,资源消耗少。
- 还没有人留言评论。精彩留言会获得点赞!