一种沿行走路径自动获取消火栓布置点位的方法与流程
本发明涉及消防系统,具体涉及一种沿行走路径自动获取消火栓布置点位的方法。
背景技术:
1、bim技术是一种集成设计、建造、运营和维护的数字化建造技术。设计师可以通过bim软件创建精确的数字模型,更好地理解建筑的结构、功能和相互联系,从而可以更好地规划和协调建筑项目的各个方面。bim技术在建筑给排水方面的应用非常广泛。bim技术可以帮助设计师创建三维的给排水系统模型,并将其集成到建筑模型中。通过使用可视化工具,设计师可以更容易地设计给水系统、排水系统以及消防系统。
2、过去,传统设计师通常会手动布置消火栓,这需要花费大量时间和精力,并且效率相对较低。尽管在bim技术的帮助下,设计师现在可以更容易地完成消火栓布置,但目前缺乏完全自动化实现这一任务的技术,这主要是因为消火栓的位置和数量布置要求较高,通常需要根据建筑特性和消防规范进行规划和安排。
技术实现思路
1、本发明所要解决的技术问题是如何将bim模型软件中已设计的三维建筑结构模型自动获取消火栓的布置点位,本发明的目的在于提供一种沿行走路径自动获取消火栓布置点位的方法,能够获取bim模型软件中已设计的三维建筑结构模型内的消火栓布置点位。
2、本发明通过下述技术方案实现:
3、一种沿行走路径自动获取消火栓布置点位的方法,包括如下步骤:
4、s01):将建筑结构模型进行空间栅格化;
5、s02):利用空间栅格化的每个空间栅格建立建筑结构模型的空间路径图;
6、s03):将所述空间路径图在bim模型软件中自行校核;
7、s04):将空间路径图中的每个所述空间栅格中的消火栓进行反保护范围分析;
8、s05):获取每个空间栅格中的消火栓在保护范围内的布置点位。
9、可选的,采用如下步骤获取所述每个空间栅格中的消火栓在保护范围内的布置点位:
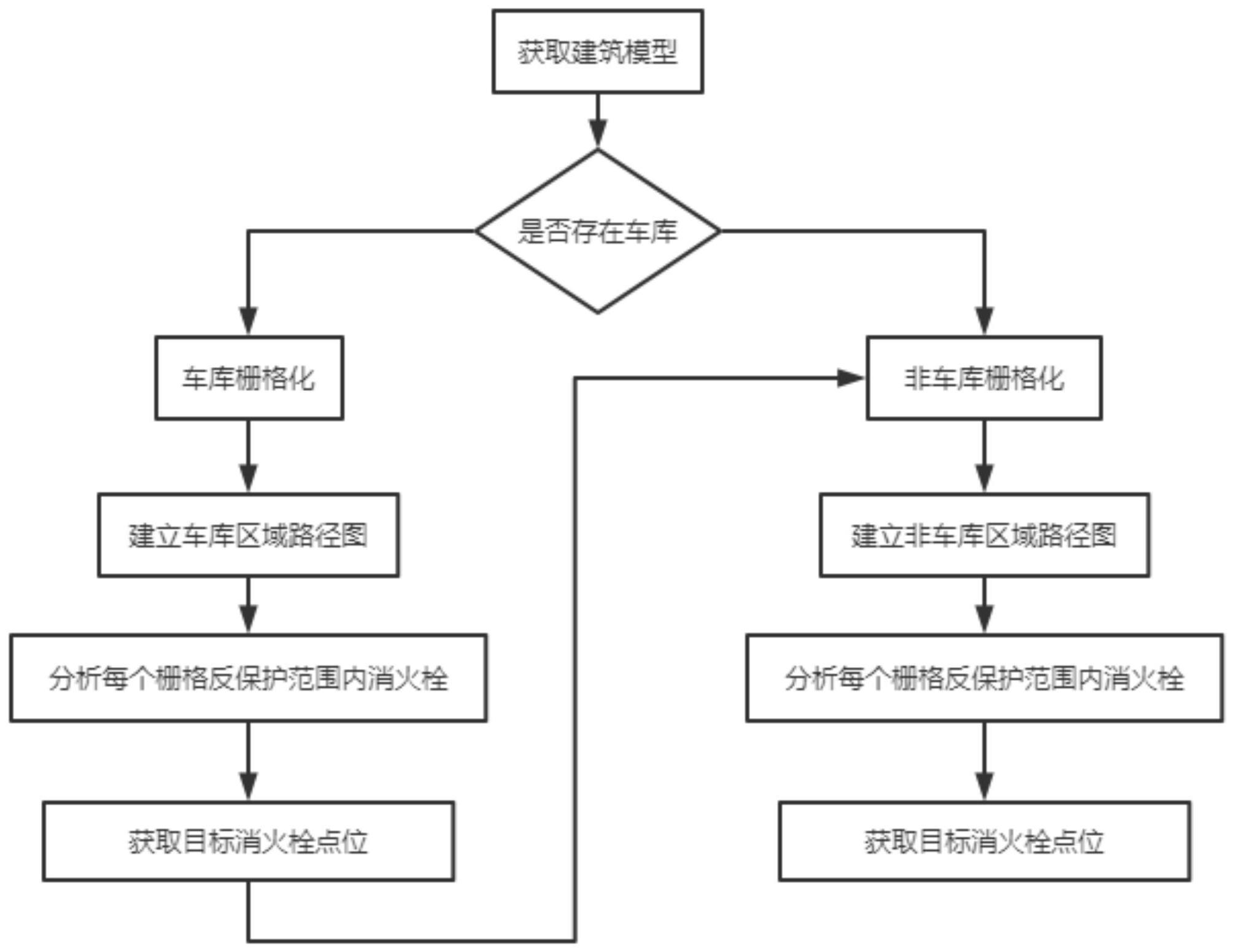
10、s1):对建筑结构模型在进行空间栅格化之前,判断建筑结构模型是否存在车库区域;
11、s2):若存在所述车库区域,将车库区域进行空间栅格化,利用空间栅格化的每个空间栅格建立车库区域的空间路径图;
12、s3):将所述车库区域的空间路径图在bim模型软件中自行校核;
13、s4):将车库区域的空间路径图中的每个所述空间栅格中的消火栓进行反保护范围分析;
14、s5):获取车库区域的每个空间栅格中的消火栓在保护范围内的布置点位;
15、s6):采用步骤s2)-s5)的方式,获取非车库区域的每个空间栅格中的消火栓在保护范围内的布置点位;
16、s7):若不存在车库区域,采用步骤s6)获取所述非车库区域的每个空间栅格中的消火栓在保护范围内的布置点位。
17、可选的,所述车库区域和非车库区域进行空间栅格化采用如下步骤:
18、s11):将所述车库区域进行空间栅格化,以车库边界线为区域轮廓,将车库区域设为多个空间网格,获取每个所述空间网格的中心点;
19、s12):获取车库范围内的所有参考物,将参考物划分为承重墙体、未承重墙体和柱体,将所述承重墙体和柱体的长度进行筛选;
20、s13):将所述非车库区域进行空间栅格化,以非车库边界线为区域轮廓,将非车库区域设为多个空间网格,获取每个所述空间网格的中心点;
21、s14):获取非车库范围内所有的所述未承重墙体和承重墙体,将承重墙体的长度进行筛选。
22、可选的,建立所述车库区域和非车库区域的空间路径图采用如下步骤:
23、s21):将车库区域范围内的所有的所述空间网格中心点进行连接,将各个空间网格中心点连接后生成车库区域的空间路径;
24、s22):校核已经建立的所述空间路径,当空间路径和障碍物碰撞则认为空间路径无效,可得到车库区域的有效空间路径图;
25、s23):将非车库区域内的所有空间网格中心点进行连接,将各个空间网格中心点连接后生成非车库区域的空间路径;
26、s24):校核已经建立的所述空间路径,当空间路径和障碍物碰撞则认为空间路径无效,可得到非车库区域的有效空间路径图。
27、可选的,所述空间路径图在bim模型软件中自行校核的步骤如下:
28、s31):获取所述建筑结构模型空间内所有的门对象,获得所有的所述门对象在水平平面上的门投影线;
29、s32):搜寻所有的所述门投影线,使每条门投影线和所述空间路径中的某个空间路径相交,若空间路径中有一条空间路径和门投影线不相交,则减少所述空间栅格的划分间距;
30、s33):缩小空间栅格划分间距直到门投影线与空间路径中的至少一条空间路径相交。可选的,所述建筑结构模型内具有车库区域,所述车库区域的起点获取采用如下步骤:
31、s41):将所述空间栅格进行排序;
32、s42):将空间栅格左上端的交角作为起点。
33、可选的,获取所述车库区域内的消火栓的布置点位采用如下步骤:
34、s51):将所述空间栅格的左上端交角作为起点,确定空间栅格反保护范围;
35、s52):在所述反保护范围中优先分析保护范围内的柱体;
36、s53):在柱体数量不满足要求的情况下将所述保护范围内的未承重墙体进行分析;
37、s54):重复步骤s51)-s54),将每个空间栅格以顺时针的路径进行分析,直到所有空间栅格的点位都进行了反保护范围分析。
38、其中,所述反保护范围的内柱体的分析采用如下步骤:
39、s111):获取反保护范围内的所有柱体;
40、s112):根据柱体大小,在合适方向上布置所有可能的消火栓点位,将消火栓点位放入集合j中;
41、s113):如果消火栓点位处消火栓开门线和车位线发生重叠,则认为不合理,从集合j中去掉相应的消火栓点位;
42、s114):根据集合j内的消火栓点位,选择集合j中行走距离最长的两个位置作为目标消火栓布置点位;
43、s115):校核反保护范围内消火栓的间距,当消火栓间距小于5m时调整柱体上的消火栓。
44、其中,所述反保护范围内的非承重墙体的分析采用如下步骤:
45、s121):获取反保护范围内所有的非承重墙体(只要墙体线和范围有交叉即认为在保护范围内);
46、s122):将非承重墙体拆分为两个具有方向向量v的墙面,对每个墙面按照消火栓的尺寸+安装空间进行分段,所有分段后且具有方向向量v的墙面为消火栓的潜在位置或消火栓点位,该消火栓的潜在位置放入集合j中;
47、s123):如果消火栓点位处的消火栓开门线和车位线、门开门线发生重叠,则认为不合理,从集合j中去掉相应的消火栓点位;
48、s124):根据集合j内的消火栓点位,选择集合j中行走距离最长且靠走道的位置作为目标消火栓布置点位;
49、s125):校核反向保护范围内消火栓的间距,当消火栓间距小于5m时调整墙体上的消火栓。
50、可选的,所述建筑结构模型内具有非车库区域,获取非车库区域内的消火栓的布置点位采用如下步骤:
51、s61):将所述空间栅格进行排序;
52、s62):将空间栅格左上端的交角作为起点。
53、可选的,获取所述非车库区域内的消火栓的布置点位采用如下步骤:
54、s71):将所述空间栅格的左上端交角作为起点,确定空间栅格的反保护范围;
55、s72):分析空间栅格反保护范围内是否存在消火栓,如果不存在两个消火栓则对保护范围内的未承重墙体进行分析,在柱体数量不满足要求的情况下将所述保护范围内的未承重墙体进行分析;
56、s73):重复步骤s71)-s72),将每个空间栅格以顺时针的路径进行分析,直到所有空间栅格的点位都进行了反保护范围分析。
57、可选的,在所述步骤s05)中,将每个所述空间栅格中的消火栓放置在保护范围内的所述布置点位上。
58、本发明与现有技术相比,具有如下的优点和有益效果:
59、本发明利用bim模型软件设计建筑结构模型,将建筑结构模型进行空间栅格化,利用空间栅格化的每个空间栅格建立建筑结构模型的空间路径图,空间路径图在bim模型软件中自行校核后对空间路径图中的每个空间栅格中的消火栓进行反保护范围分析,最后获取每个空间栅格中的消火栓在保护范围内的布置点位,本发明通过bim模型软件获取三维建筑结构模型内的消火栓布置点位。
- 还没有人留言评论。精彩留言会获得点赞!