一种基于可重构智能表面的近场目标跟踪的相位设计方法
本发明涉及基于可重构智能表面的近场目标跟踪的相位设计方法,属于信号处理。
背景技术:
1、定位跟踪技术广泛应用在无人驾驶、搜救行动和智能交通等领域。当前的定位跟踪方案大多基于全球卫星导航系统(global navigation satellite system,gnss),然而,在天气恶劣或遮挡物多的环境下,gnss信号可能被阻断,无法提供正常的目标跟踪。因此,如何在不依赖gnss的条件下实现目标的有效跟踪已成为人们研究的热门问题。
2、目前,在gnss无法提供服务的情况下,通常使用大规模的阵列天线采集数据,从而实现跟踪功能。但要想进一步提高定位精度,需要增加天线数量,这往往增加了硬件成本。在不改变天线阵列规模的情况下,寻找新技术来提高跟踪系统的性能至关重要。可重构智能表面(reconfigurable intelligent surfaces,ris)是一种极具发展前景的新技术,它可以通过设计附着在人造超表面上的被动反射单元的相位来创建一个定向路径,将发射源信号反射到目的地。将ris部署在天线阵列近场区域,可以为天线阵列提供额外接收信号回波,从而提高近场目标跟踪精度。研究如何将ris应用于目标跟踪技术上,通过合理的ris相位设计提高跟踪精度,具有重要的意义。
技术实现思路
1、本发明目的是针对无gnss信号情况下,在不增加阵列天线数量的前提下,如何提高近场区域内目标跟踪的性能问题,提出一种基于可重构智能表面的近场目标跟踪的相位设计方法。
2、一种基于可重构智能表面的近场目标跟踪的相位设计方法具体过程为:
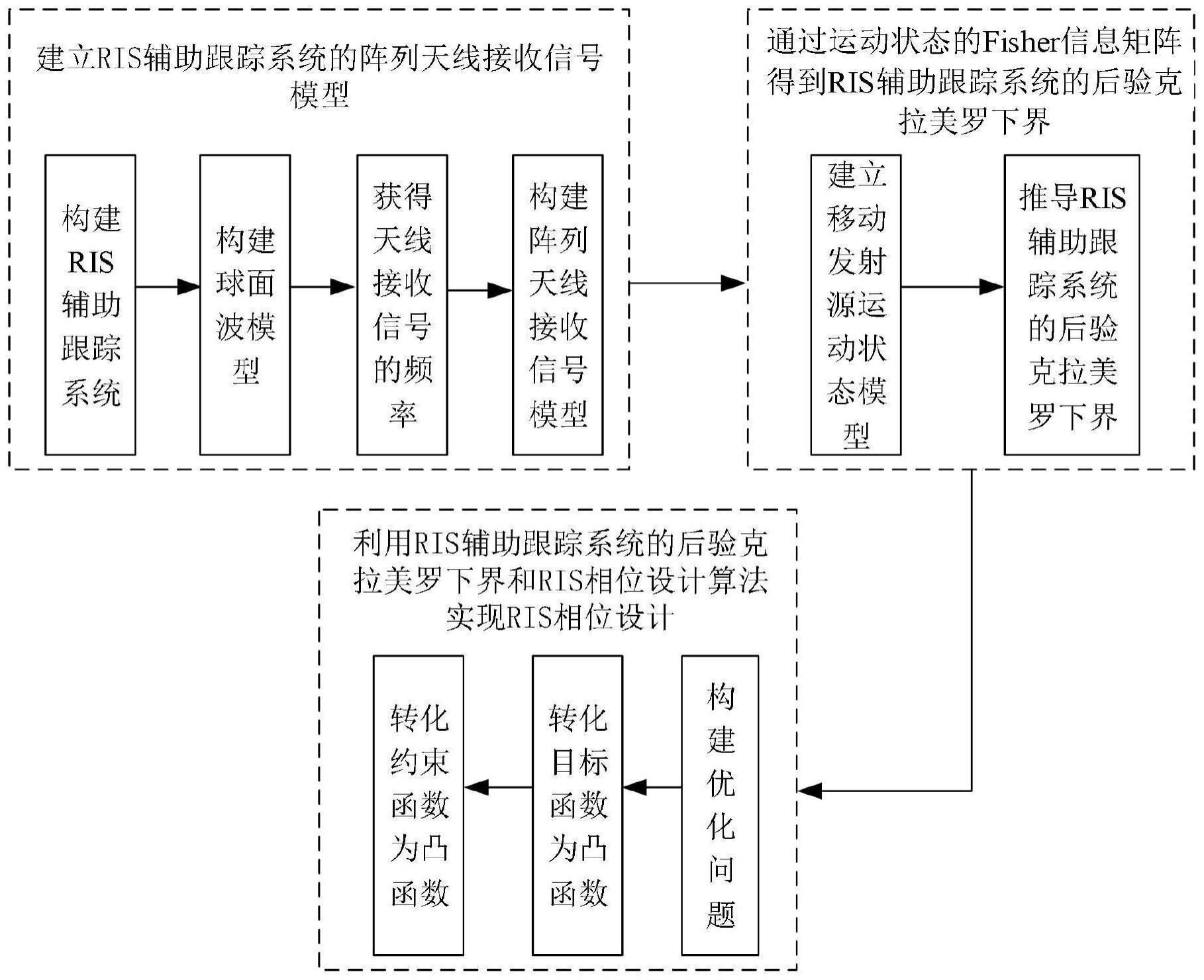
3、步骤一、建立ris辅助跟踪系统的阵列天线接收信号模型;所述ris为可重构智能表面;步骤二、通过运动状态的fisher信息矩阵得到ris辅助跟踪系统的后验克拉美罗下界;步骤三、利用ris辅助跟踪系统的后验克拉美罗下界和ris相位设计算法实现ris相位设计。
4、本发明的有益效果为:
5、本发明利用可重构智能表面能够智能地重新配置无线传播环境的特性,建立移动目标与天线阵列之间的虚拟视距链路,在非视距条件下实现了移动目标的有效跟踪;利用后验克拉美罗下界(posterior cramér-rao lower bound,pcrlb)设计有效的相位配置,在不增加阵列天线数量的前提下,提升了系统的跟踪性能,本发明涉及移动目标跟踪,具体针对可重构智能表面辅助的近场目标跟踪系统的相位设计方法,通过获取更准确的状态估计信息,提高近场区域内目标跟踪精度。同时也解决了在天气恶劣或遮挡物多的环境下,gnss信号被阻断,无法提供正常的目标跟踪的问题。
技术特征:
1.一种基于可重构智能表面的近场目标跟踪的相位设计方法,其特征在于:所述方法具体过程为:
2.根据权利要求1所述的一种基于可重构智能表面的近场目标跟踪的相位设计方法,其特征在于:所述步骤一中建立ris辅助跟踪系统的阵列天线接收信号模型;具体过程为:
3.根据权利要求2所述的一种基于可重构智能表面的近场目标跟踪的相位设计方法,其特征在于:所述步骤一一中构建ris辅助的跟踪系统;具体过程为:
4.根据权利要求3所述的一种基于可重构智能表面的近场目标跟踪的相位设计方法,其特征在于:所述步骤一二中基于步骤一一构建球面波模型;具体过程为:
5.根据权利要求4所述的一种基于可重构智能表面的近场目标跟踪的相位设计方法,其特征在于:所述步骤一三中基于步骤一二获得天线接收信号的频率;具体过程为:
6.根据权利要求5所述的一种基于可重构智能表面的近场目标跟踪的相位设计方法,其特征在于:所述步骤一四中基于步骤一三构建阵列天线接收信号模型;具体过程为:
7.根据权利要求6所述的一种基于可重构智能表面的近场目标跟踪的相位设计方法,其特征在于:所述步骤二中通过运动状态的fisher信息矩阵得到ris辅助跟踪系统的后验克拉美罗下界;具体过程为:
8.根据权利要求7所述的一种基于可重构智能表面的近场目标跟踪的相位设计方法,其特征在于:所述步骤三中利用ris辅助跟踪系统的后验克拉美罗下界和ris相位设计算法实现ris相位设计;具体过程为:
技术总结
一种基于可重构智能表面的近场目标跟踪的相位设计方法,本发明涉及基于可重构智能表面的近场目标跟踪的相位设计方法。本发明目的是针对无GNSS信号情况下,在不增加阵列天线数量的前提下,如何提高近场区域内目标跟踪的性能问题。一种基于可重构智能表面的近场目标跟踪的相位设计方法具体过程为:步骤一、建立RIS辅助跟踪系统的阵列天线接收信号模型;所述RIS为可重构智能表面;步骤二、通过运动状态的Fisher信息矩阵得到RIS辅助跟踪系统的后验克拉美罗下界;步骤三、利用RIS辅助跟踪系统的后验克拉美罗下界和RIS相位设计算法实现RIS相位设计。本发明属于信号处理技术领域。
技术研发人员:王波,张宁,赵彦平,栾明桉,冯志远,杨佳慧,姚宝花
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!