大米加工设备的控制方法及其系统与流程
本技术涉及智能控制领域,且更为具体的涉及一种大米加工设备的控制方法及其系统。
背景技术:
1、大米加工是将稻谷经过一系列的处理过程,包括脱壳、碾米、研磨、筛分等,最终得到可食用的白米的过程。在脱壳时,脱壳机通过摩擦和冲击力将稻谷的外壳剥离,得到去壳的稻谷。常见的控制谷物脱壳机功率的方法包括以下几种:1、手动调节:操作人员根据经验和观察,手动调节脱壳机的功率。这种方法的优点是简单易行,但缺点是需要经验丰富的操作人员,并且容易受到主观因素的影响,导致脱壳效果不稳定。2、定时控制:通过设置脱壳机的运行时间来控制功率。这种方法的优点是简单直观,但缺点是无法根据实际情况进行动态调整,容易导致脱壳不彻底或过度脱壳。3、传感器反馈控制:通过安装传感器来监测谷物的脱壳情况,根据反馈信号来调整脱壳机的功率。常用的传感器包括温度传感器、湿度传感器和压力传感器等。这种方法可以实现实时监测和自动调整,但需要合适的传感器,并且传感器的准确性和可靠性会对控制效果产生影响。
2、因此,期待一种优化的大米加工处理方案。
技术实现思路
1、为了解决上述技术问题,提出了本技术。本技术的实施例提供了一种大米加工设备的控制方法,其使用基于深度神经网络模型的人工智能技术来智能地对去壳后谷物的拍摄图像和预定时间段内脱壳机的功率进行特征编码与提取,以得到用于表示当前时间点脱壳机的功率应该增大或减小的分类标签。这样,通过构建大米加工设备的控制方案,基于上述分类结果提高谷物脱壳机的脱壳效率和一致性。
2、根据本技术的一个方面,提供了一种大米加工设备的控制方法,其包括:
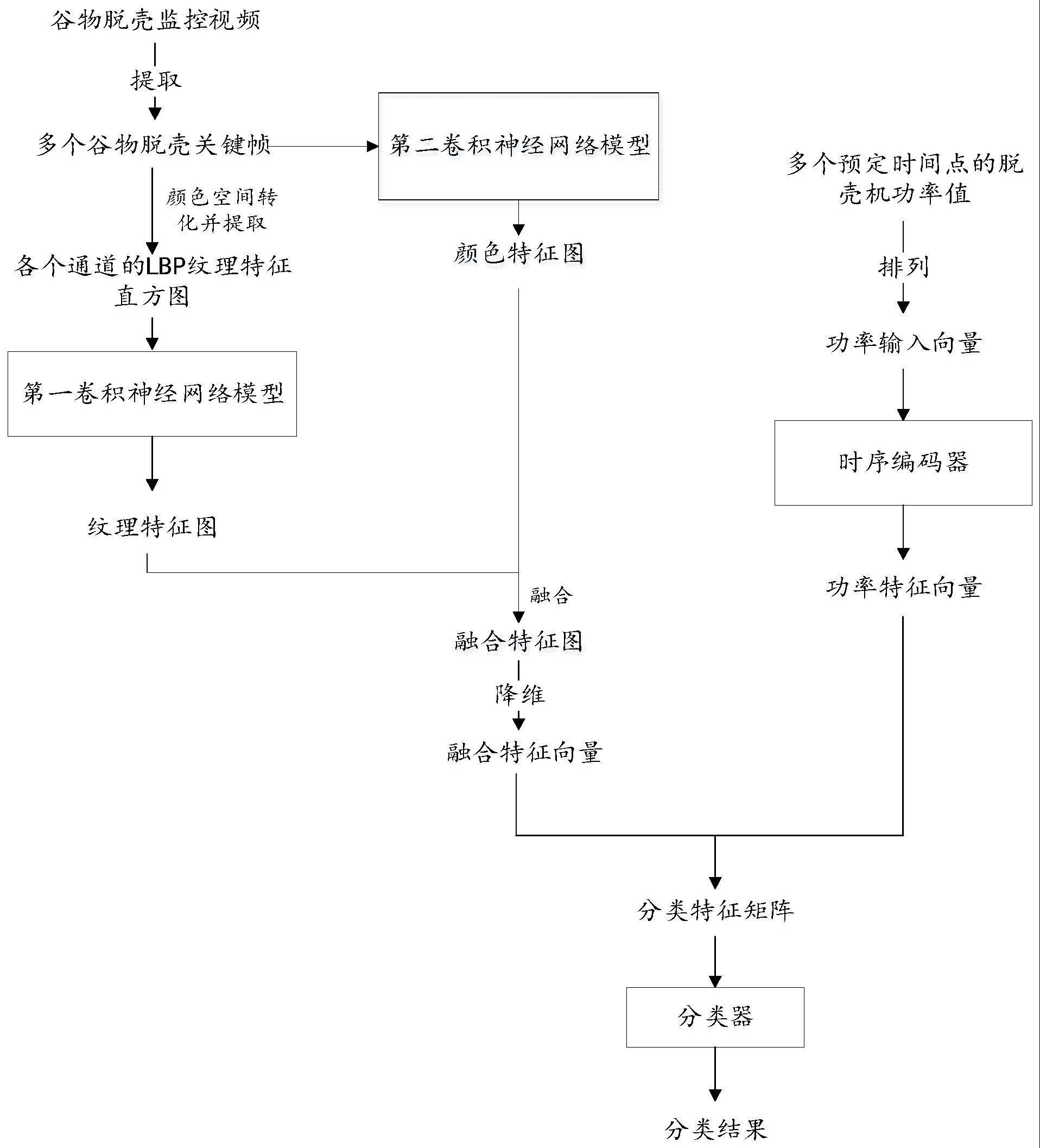
3、获取谷物脱壳监控视频和多个预定时间点的脱壳机的功率值;
4、将所述谷物脱壳监控视频中提取多个谷物脱壳关键帧;
5、将每个谷物脱壳关键帧从rgb颜色空间转化到ycbcr颜色空间并提取每个谷物脱壳关键帧的各个通道的lbp纹理特征直方图;
6、将多个谷物脱壳关键帧的各个通道的lbp纹理特征直方图分别通过作为特征提取器的第一卷积神经网络模型以得到纹理特征图;
7、将所述多个谷物脱壳关键帧通过作为特征提取器的第二卷积神经网络模型以得到颜色特征图;
8、对所述颜色特征图和所述纹理特征图进行基于特征流形的几何复杂性约束以得到融合特征图后,并对所述融合特征图进行沿通道维度的各个特征矩阵池化以得到融合特征向量;
9、将所述多个预定时间点的脱壳机的功率值按照时间维度排列为功率输入向量后通过包含一维卷积层和全连接层的时序编码器以得到功率特征向量;
10、计算所述功率特征向量相对于所述融合特征向量的响应性估计以得到分类特征矩阵;
11、将所述分类特征矩阵通过分类器以得到分类结果,所述分类结果用于表示当前时间点脱壳机的功率应该增大或减小。
12、在上述的大米加工设备的控制方法中,对所述颜色特征图和所述纹理特征图进行基于特征流形的几何复杂性约束以得到融合特征图后,并对所述融合特征图进行沿通道维度的各个特征矩阵池化以得到融合特征向量,包括:
13、将所述颜色特征图和所述纹理特征图分别通过基于全连接层的全感知模块以得到第一全感知特征向量和第二全感知特征向量;
14、对所述第一全感知特征向量和所述第二全感知特征向量进行关联编码以得到融合全感知特征矩阵;
15、计算所述颜色特征图的沿通道维度的各个特征矩阵相对于所述融合全感知特征矩阵的转移矩阵;
16、计算所述各个转移矩阵的全局均值以得到多个第一转移特征值;
17、计算所述纹理特征图的沿通道维度的各个特征矩阵相对于所述融合全感知特征矩阵的转移矩阵;
18、计算所述各个转移矩阵的全局均值以得到多个第二转移特征值;
19、对所述多个第一转移特征值和所述多个第二转移特征值进行基于最大值的归一化处理以得到第一特征流形几何复杂度约束特征向量和第二特征流形几何复杂度约束特征向量;
20、以所述第一特征流形几何复杂度约束特征向量和第二特征流形几何复杂度约束特征向量中各个位置的特征值作为权重分别对所述颜色特征图的沿通道维度的各个特征矩阵进行加权以得到优化颜色特征图和优化纹理特征图;
21、将所述优化颜色特征图和所述优化纹理特征图沿着通道维度进行聚合以得到所述融合特征图。
22、在上述的大米加工设备的控制方法中,将所述多个预定时间点的脱壳机的功率值按照时间维度排列为功率输入向量后通过时序编码器以得到功率特征向量,包括:
23、使用所述时序编码器的全连接层以如下编码公式对所述输入向量进行全连接编码以提取出所述输入向量中各个位置的特征值的高维隐含特征,其中,所述编码公式为:其中x是输入向量,y是输出向量,w是权重矩阵,b是偏置向量,表示矩阵乘;
24、使用所述时序编码器的一维卷积层以如下提取公式对所述输入向量进行一维卷积编码以提取出所述输入向量中各个位置的特征值间的高维隐含关联特征,其中,所述提取公式为:
25、
26、其中,a为卷积核在x方向上的宽度、f为卷积核参数向量、g为与卷积核函数运算的局部向量矩阵,w为卷积核的尺寸。
27、在上述的大米加工设备的控制方法中,计算所述功率特征向量相对于所述融合特征向量的响应性估计以得到分类特征矩阵,用于:
28、以如下响应性估计公式计算所述功率特征向量相对于所述融合特征向量的响应性估计以得到分类特征矩阵;
29、其中,所述响应性估计公式为:
30、
31、其中va表示所述融合特征向量,vb表示所述功率特征向量,m表示所述分类特征矩阵,表示矩阵相乘。
32、根据本技术的另一方面,还提供了一种大米加工设备的控制系统,其包括:
33、数据获取模块,用于获取谷物脱壳监控视频和多个预定时间点的脱壳机的功率值;
34、监控关键帧提取模块,用于将所述谷物脱壳监控视频中提取多个谷物脱壳关键帧;
35、颜色空间转换模块,用于将每个谷物脱壳关键帧从rgb颜色空间转化到ycbcr颜色空间并提取每个谷物脱壳关键帧的各个通道的lbp纹理特征直方图;
36、纹理特征提取模块,用于将多个谷物脱壳关键帧的各个通道的lbp纹理特征直方图分别通过作为特征提取器的第一卷积神经网络模型以得到纹理特征图;
37、颜色特征提取模块,用于将所述多个谷物脱壳关键帧通过作为特征提取器的第二卷积神经网络模型以得到颜色特征图;
38、融合模块,用于对所述颜色特征图和所述纹理特征图进行基于特征流形的几何复杂性约束以得到融合特征图后,并对所述融合特征图进行沿通道维度的各个特征矩阵池化以得到融合特征向量;
39、功率特征提取模块,用于将所述多个预定时间点的脱壳机的功率值按照时间维度排列为功率输入向量后通过包含一维卷积层和全连接层的时序编码器以得到功率特征向量;
40、关联模块,用于计算所述功率特征向量相对于所述融合特征向量的响应性估计以得到分类特征矩阵;
41、分类结果生成模块,用于将所述分类特征矩阵通过分类器以得到分类结果,所述分类结果用于表示当前时间点脱壳机的功率应该增大或减小。
42、与现有技术相比,本技术提供的大米加工设备的控制方法及其系统,其使用基于深度神经网络模型的人工智能技术来智能地对去壳后谷物的拍摄图像和预定时间段内脱壳机的功率进行特征编码与提取,以得到用于表示当前时间点脱壳机的功率应该增大或减小的分类标签。这样,通过构建大米加工设备的控制方案,基于上述分类结果提高谷物脱壳机的脱壳效率和一致性。
- 还没有人留言评论。精彩留言会获得点赞!