一种图像识别的自动驾驶故障行驶诊断方法
本发明属于监测,更具体地说,尤其涉及—种图像识别的自动驾驶故障行驶诊断方法。
背景技术:
1、随着科技的进步自动驾驶在逐步融入大众的生活,虽然自动驾驶更加方便人们的出行,但也正是由于汽车的自动化行驶,人们在汽车的行驶过程中就会放松警惕,汽车在行驶过程中会增大发生交通事故机率。
2、目前在自动驾驶过程中,在出现自动驾驶时,汽车行驶过程中通过检测设备实现数据信息检测,这种方法虽然在一定上能够提高自动驾驶检测能力,但只能借助检测设备,一旦检测设备出现故障,就难以实现自动驾驶,无法提高自动驾驶故障行驶诊断能力。此种方法对于故障检测的准确度不高,在自动驾驶过程中不能准确的反映出现故障的原因,不能在行驶过程中自动化实时监测和判断自动化汽车是否存在故障。
技术实现思路
1、针对上述技术的不足,本发明公开一种图像识别的自动驾驶故障行驶诊断方法,能够大大提高自动驾驶故障行驶的故障诊断能力。
2、为实现上述目的,本发明提供如下技术方案:一种图像识别的自动驾驶故障行驶诊断方法,其中包括:
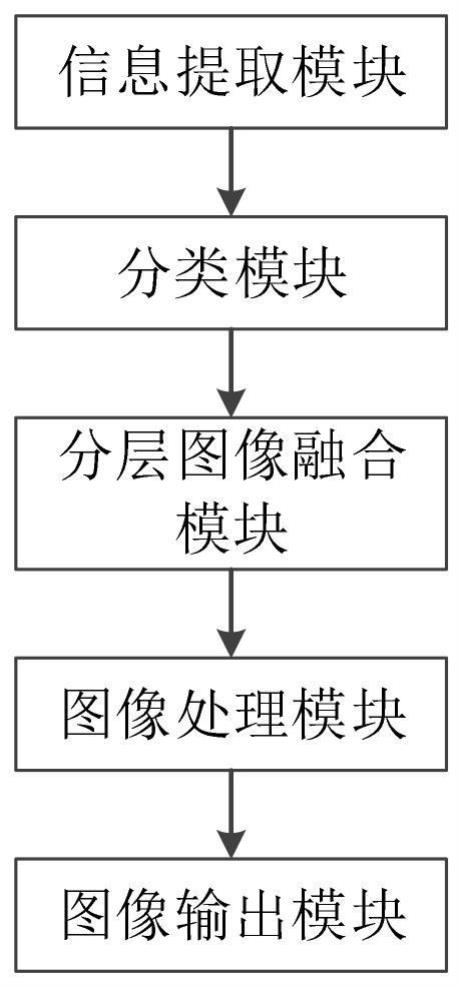
3、通过图像识别模块获取自动驾驶数据信息,其中图像识别模块包括信息提取模块、分类模块、分层图像融合模块、图像处理模块和图像输出模块;
4、其中所述信息提取模块的输出端与分类模块的输入端连接,分类模块的输出端与分层图像融合模块的输入端连接,分层图像融合模块的输出端与图像处理模块的输入端连接,图像处理模块的输出端与图像输出模块的输入端连接;其中信息提取模块通过摄像头采集图像信息,用于汽车驾驶过程中获取汽车运行状态图片信息,并提取、输出图片的数据信息;分类模块将提取的数据信息按照数据属性、数据大小、数据格式或者数据传输性质实现数据信息分类,图像处理模块用于对分类模块输出的图片信息进行图像噪声处理,根据不同数据属性底层规则将面片分为高频率噪声分量与低频率噪声分量两种类型,分层图像融合模块通过使用分层图像融合框架,用稀疏是精度,用于对信息提取模块所提取的图片信息进行融合处理,实现信息的高效处理,提高驾驶故障识别分析的精度及效率,所述分层图像融合模块用于实现数据信息的分解;图像输出模块用于输出分层图像融合模块所处理的图像信息,判断自动驾驶汽车的运行状况;
5、作为本发明进一步的技术方案,通过诊断模型对获取的自动驾驶数据信息进行诊断,使用的诊断模型方法是改进型聚类分类方法。
6、作为本发明进一步的技术方案,信息提取模块包括主控模块和与所述主控模块连接的信息分解模块、信息规则生成模块、信息排序模块和信息输出模块,其中所述主控模块用于控制数据信息的分解、生成、排序和输出,所述信息分解模块用于将获取的自动驾驶故障数据信息分解,信息规则生成模块用于按照分解属性将数据信息输出分解规则,信息排序模块用于将输入的数据信息按照信息属性、信息大小或者数据传输格式进行排序,所述信息输出模块用于输出数据信息,以供用户终端或者设备终端使用。
7、作为本发明进一步的技术方案,分类模块为具有融合算法的几何分类法,几何分类法包括平滑面片分类方法、随机面片分类方法和主方向面片分类方法。
8、作为本发明进一步的技术方案,分类模块的工作方法步骤包括:
9、步骤一,在汽车运行过程中将信息提取模块中所提取的图像信息拆分为若干个小图像面片:
10、p=(p1,p2,…,pn) (1)
11、式(1)中,p是自动驾驶源图像面片集合,p是自动驾驶源图像面片,n是自动驾驶源图像面片数量;几何分类法基于平滑阈值将平滑和非平滑面片进行分类,其中,随机面片和主方向面片均为非光滑面片;步骤二,计算汽车运行过程中的运行状态图像像素的梯度kij(j=1,2,…,w),i是自动驾驶源图像编号,i=(1,2,…,n),由x和y坐标梯度gij(x)和gij(y)组成;图像向量vi中每个像素kij的梯度值为:
12、
13、在公式(2)中,j是自动驾驶源图像像素点,是自动驾驶源图像中x轴的像素梯度值,是自动驾驶源图像中y轴的像素梯度值;
14、步骤三,分解每个图像面片的梯度值,梯度值公式为:
15、
16、式(3)中,gi是自动驾驶源图像面片的梯度,uisivi是gi的梯度值分解,si是主方向向量的对角线2×2矩阵;当获得si时,计算主方向量度r,r的计算方法如式(4)所示:
17、
18、式(4)中,r越小,自动驾驶源图像向量越随机;计算阈值r以区分自动驾驶源图像的随机和主方向面片;作为自动驾驶源图像的有效低通滤波器,二维高斯模糊函数用于平滑分类的平滑、随机和主方向面片,公式(5)是二维高斯模糊函数:
19、
20、式(5)中,x是水平轴上距原点的距离,y是垂直轴上距原点的距离,σ是高斯分布的标准偏差,σ是介于0-5之间可变参数。
21、作为本发明进一步的技术方案,加权平均法、卡尔曼滤波或者多贝叶斯估计法均设置有编码器。
22、作为本发明进一步的技术方案,图像处理模块的工作方法包括高频分量处理和低频分量处理;
23、其中高频分量的处理方法为:
24、假设输入自动驾驶源图像ih具有w个灰度级,并将自动驾驶源图像分割为n个具有s×s像素的图像面片,步骤一,通过计算每个灰度级的像素数,对直方图每个图像面片ik(k=1,2…,n)的向量hk进行计数;利用hk和图像面片大小s×s计算图像面片k的灰度概率pk灰度概率pk,通过等式(6)计算:
25、pk=hk/(s×s) (6)
26、步骤二,使用每个图像面片k的灰度概率pk计算每个图像面片的熵;为信息性图像面片选择设置阈值th;对于一个图像面片,如果es>th,图像面片将保留用于词典训练;
27、假设输入图像被分割成k个信息图像面片,则使用omp算法对每个图像面片bt(t=1,2…,k)进行稀疏编码,将每个图像面片bt编码为稀疏系数zt,然后利用max-l1融合规则对系数进行融合;等式(7)是融合规则函数表示为:
28、
29、式(7)中,ih是对应于自动驾驶源图像面片的融合向量,h是高频分量zk是对应于每个图像面片的稀疏系数,ok是omp算法函数值,d是由所提出的omp算法训练的词典;
30、其中低频分量的处理方法为:
31、采用基于l2-范数的加权平均方法对低频分量进行融合;计算相应高频分量的l2-范数we=||ih||2,假设约束矩阵a具有满秩,公式(8)是l2-范数最小化公式:
32、
33、式(8)中,x是l2-范数值,b为参数;为了减少计算量,在l2-范数中引入了拉格朗日乘子l:
34、
35、式(9)中,λ是引入的拉格朗日乘数;低频分量是通过等式(10)融合后得到的:
36、
37、式(10)中il是对应图源的融合向量,l是低频分量;
38、综上所述,根据max-l1与加权平均融合规则,将融合后的高频分量和低频分量进行组合,形成最终的融合图像,公式为:
39、i=ih=il (11)
40、式(11)中,i是自动驾驶源图像,il和ih分别是低频和高频分量;
41、将融合图像块进行词典学习,以提高图像自动驾驶故障识别精度,进而用于下一步故障诊断工作。
42、作为本发明进一步的技术方案,图像输出模块包括输出控制单元以及与控制单元连接的液晶显示单元。在具体应用中,在自动驾驶源图像经过信息提取模块、分类模块、分层融合模块和图像处理模块的分析之后,通过液晶显示单元输出最终图像,并判断自动驾驶汽车是否发生故障行驶。
43、作为本发明进一步的技术方案,诊断模型的工作方法为:假设聚类中心集合为q={q1,q2,…,qk};自动驾驶实际运行数据点w与聚类中心q对比,计算最小欧式距离dw:
44、dw=min[dist(w,q1),...,dist(w,qk)] (12)
45、式(12)中,dist()为欧式距离函数;若dw值超过限值dmax,则是自动驾驶存在故障嫌疑;用评判指标进行自动驾驶数据信息计算:
46、ξ=w2-w1 (13)
47、式(13)中,ξ是自动驾驶影响量系数,w2是自动驾驶实际状况,w1是自动驾驶系统显示驾驶数据信息,自动驾驶状态显示驾驶数据信息w1越大,自动驾驶影响量系数ξ就越大,故障也就越大,w1与故障之间具有明显的相关性;因此利用相关系数法计算故障和自动驾驶状态显示驾驶数据信息之间的相关系数,若相关性高,则自动驾驶存在故障行驶嫌疑;
48、评估方法使用的是皮尔逊相关系数评估,皮尔逊相关系数能衡量两个变量间线性相关程度,对于故障诊断和自动驾驶数据信息w1,公式(14)是皮尔逊相关系数计算公式:
49、
50、式(14)中,e是期望值函数,r是皮尔逊相关系数;ξ表示影响故障诊断和自动驾驶数据信息的参数,w表示期望值函数的权值,e(ξ1)表示影响故障诊断和自动驾驶数据信息参数的期望值函数,e(ξw1)表示在一个权值下的期望值函数,当r大于阈值rmax时,表示自动驾驶存在故障行驶嫌疑。
51、本发明的技术效果和优点:
52、本发明提供的一种图像识别的自动驾驶故障行驶诊断方法,与现有技术相比,本发明通过使用图像分层融合、几何分类和高低频分量训练词典的算法,解决了图像采集、图像分类、图像融合、故障诊断众多方面的复杂问题,得到了结果可靠合理的评估方法。本发明通过设置图像识别模块获取自动驾驶数据信息,其中图像识别模块包括信息提取模块、分类模块、分层图像融合模块、图像处理模块和图像输出模块等不同的模块提高了图像信息识别能力,为自动化驾驶提供有力的保护,提高了数据信息处理能力。
- 还没有人留言评论。精彩留言会获得点赞!