一种基于OS-ELM模型的气动力在线建模方法与流程
本发明涉及在线建模,尤其涉及一种基于os-elm模型的气动力在线建模方法。
背景技术:
1、在飞行器研发阶段,建立气动力数学模型是进行控制器设计,实现精准导航的前提。目前,气动力建模按照建模方式可以分为离线和在线两大类。
2、离线气动力建模需要通过大量的地面风洞试验和cfd计算来获得足够丰富的气动数据,配合最小二乘法、模糊逻辑、bp神经网络等批处理建模算法,将数据一次性输入到算法中。因此,该方式既昂贵又耗时,且难以对具有多变量、多参数特点的飞行器进行建模。由于风洞试验中使用的飞行器缩比模型与全尺寸飞行器之间存在几何差异,cfd中使用的飞行器数学模型与真实飞行器之间存在的误差难以消除,以及风洞试验中存在洞壁干扰、支架干扰和流动模型缺陷等不利因素,会导致气动力模型的保真度受到限制。
3、在线气动力建模采用飞行器传感器实时量测的运动数据作为数据来源,配合递归最小二乘法、局部模型网络等建模算法在线处理数据。该方式相比离线建模方式,能够突破风洞试验的雷诺数限制,可实现多参数飞行器的气动力模型开发,能够避免飞行器数学模型、缩比模型与真实飞行器之间的误差。但现有的在线建模方式中的神经网络结构和参数更新过程较繁琐,每一步输出权值需要重新求解计算。
技术实现思路
1、本发明的目的是提供一种基于os-elm模型的气动力在线建模方法,通过将特征向量和气动系数作为样本,使用样本对os-elm模型进行训练,得到气动力模型,极大地简化了神经网络结构和参数更新过程,随着实时数据不断到达,输出权值可以在前一步的基础上递推而得,避免了输出权值的重新求解计算。
2、本发明是这样实现的:
3、一种基于os-elm模型的气动力在线建模方法,包括:
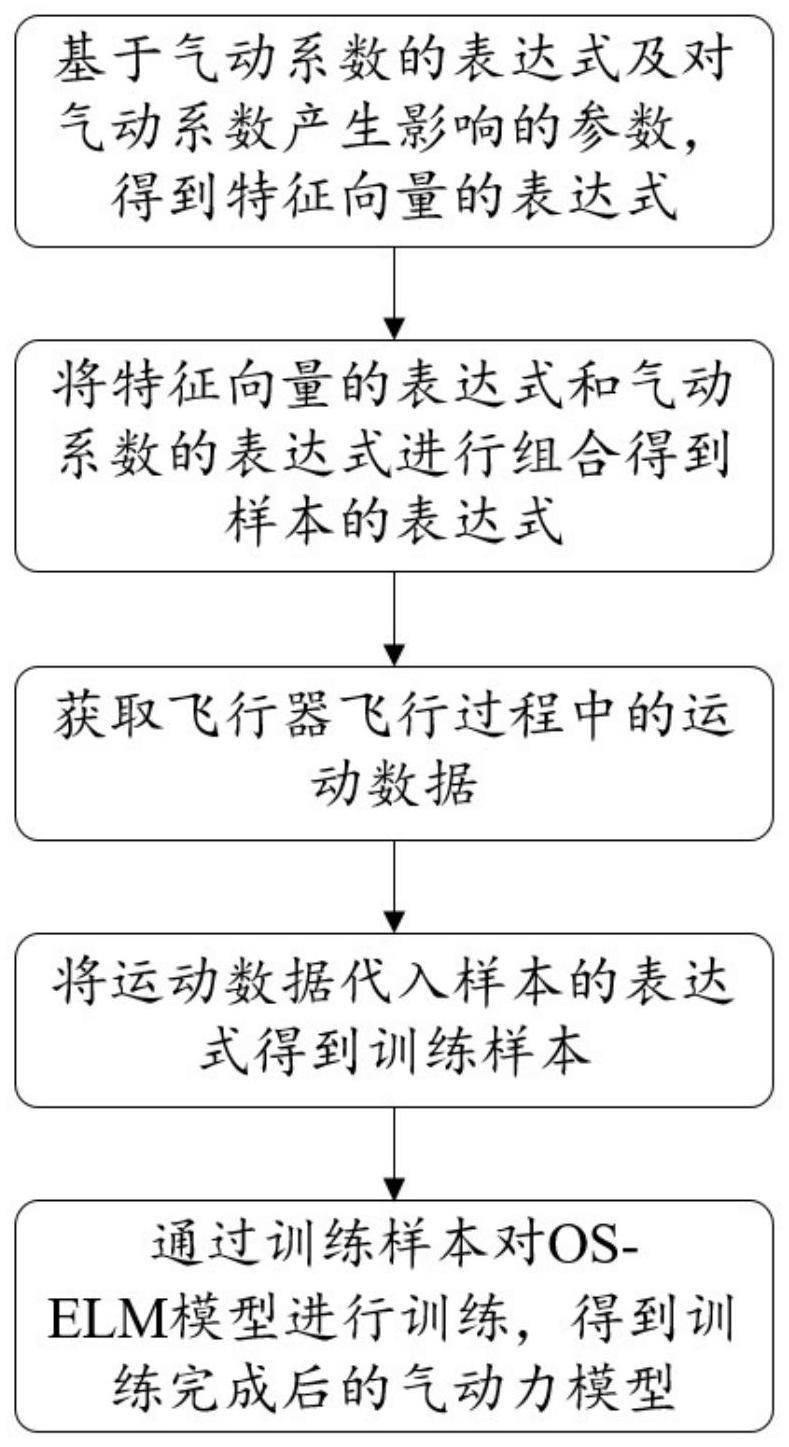
4、基于气动系数的表达式及对所述气动系数产生影响的参数,得到特征向量的表达式;
5、将所述特征向量的表达式和所述气动系数的表达式进行组合得到样本的表达式;
6、获取飞行器飞行过程中的运动数据;
7、将所述运动数据代入所述样本的表达式得到训练样本;
8、通过训练样本对os-elm模型进行训练,得到训练完成后的气动力模型。
9、进一步地,所述气动系数包括轴向力系数cx、横向力系数cy、法向力系数cz、滚转力矩系数cl、俯仰力矩系数cm、偏航力矩系数cn中的至少一项,所述气动系数的表达式为:
10、
11、
12、
13、
14、
15、
16、其中:m为飞行器质量,t为发动机推力,ax、ay、az分别为机体坐标系x、y、z轴的线加速度,分别为飞行器绕机体坐标系x、y、z轴上的角加速度,p、q、r分别为飞行器绕机体坐标系x、y、z轴上的角速度,ix、iy、iz分别为飞行器绕机体坐标系x、y、z轴的转动惯量,为动压,s为飞行器的机翼参考面积,d为飞行器的翼展长度,为飞行器的机翼平均气动弦长。
17、进一步地,所述特征向量的表达式为:
18、
19、其中为气动系数cg的特征向量,cg=cx、cy、cz、cl、cm、cn,为对cg产生影响的参数,为的高阶项,为之间混合后的耦合项。
20、进一步地,对轴向力系数cx产生影响的参数包括:空速v、迎角α、升降舵舵偏δe、俯仰角速度q中的至少一项;
21、对横向力系数cy产生影响的参数包括:空速v、迎角α、侧滑角β、副翼舵偏δa、方向舵舵偏δr中的至少一项;
22、对法向力系数cz产生影响的参数包括:空速v、迎角α、侧滑角β、俯仰角速度q、升降舵舵偏δe中的至少一项;
23、对滚转力矩系数cl产生影响的参数包括:空速v、迎角α、侧滑角β、滚转角速度p、偏航角速度r、副翼舵偏δa、方向舵舵偏δr中的至少一项;
24、对俯仰力矩系数cm产生影响的参数包括:空速v、迎角α、俯仰角速度q、升降舵舵偏δe中的至少一项;
25、对偏航力矩系数cn产生影响的参数包括:空速v、迎角α、侧滑角β、滚转角速度p、偏航角速度r、副翼舵偏δa、方向舵舵偏δr中的至少一项。
26、进一步地,所述样本的表达式为
27、进一步地,所述通过训练样本对os-elm模型进行训练,得到训练完成后的气动力模型,包括:
28、所述训练样本包括初始训练样本和在线训练样本;
29、通过所述初始训练样本对os-elm模型进行初始训练,得到初始训练阶段的输出权重;
30、通过所述在线训练样本对os-elm模型进行在线训练,当输出权重收敛后,得到训练完成的气动力模型。
31、进一步地,所述通过初始训练样本对os-elm模型进行初始训练,得到初始训练阶段的输出权重,包括:
32、设定os-elm模型中的隐含层的数量与初始训练样本的数量相同,均为l,设定样本里特征向量的特征数量为m;
33、在预设范围内随机设定输入权重a和节点的偏置b;
34、将初始训练样本中的特征向量值输入至os-elm模型,得到在隐含层中的输出hjk为:
35、
36、其中:i=1,2,…,m,k=1,2,…,l,j=1,2,…,l,aji为第i个输入层节点与第j个隐含层节点之间的输入权重,xik为第k个样本的特征向量中第i个特征的值,bj为第j个隐含层节点的偏置,为任意非线性连续激活函数;
37、将os-elm模型的输出h0β组成的向量与初始训练样本中的气动系数值组成的向量y0之间的平方差作为目标函数:
38、‖h0β-y0‖2(9),
39、其中:β为os-elm模型的输出权重,
40、求解使公式(1)最小的解,得到os-elm模型的初始输出权重β0为:
41、
42、其中,为h0的m-p广义逆。
43、进一步地,所述通过在线训练样本对os-elm模型进行在线训练,当输出权重收敛后,得到训练完成的气动力模型,包括:
44、将初始训练样本和单个在线训练样本之间的近似误差作为目标函数:
45、
46、其中:h1为单个在线训练样本的特征向量值输入os-elm模型后隐含层的输出组成的向量,y1为单个在线训练样本的气动系数值;
47、基于公式(11),得到β1为:
48、
49、引入中间变量:
50、
51、得到:
52、
53、由式(10)和式(14)得到:
54、
55、基于公式(12)、公式(14)和公式(15),得到β1的更新为:
56、
57、通过迭代,得到第k+1个在线训练样本到达时所述输出权重βk+1为:
58、
59、待所述输出权重β收敛后,得到气动力模型为:
60、y′l=hlβ (18),
61、其中:y′l是l时刻模型输出的预测值,hl为l时刻获取的飞行器的运动数据构成的特征向量在隐含层的输出,β为经过训练已经收敛的输出权重。
62、进一步地,输入权重a的预设范围为a∈(0,1),节点的偏置b的预设范围为b∈(-1,1)。
63、进一步地,所述为任意非线性连续激活函数,所述任意非线性连续激活函数包括:
64、sigmoid函数:
65、relu函数:
66、tanh函数:
67、三角函数:
68、本发明采用的技术方案能够达到以下有益效果:
69、本发明基于气动系数的表达式及对气动系数产生影响的参数,得到特征向量的表达式,然后将特征向量的表达式和气动系数的表达式进行组合得到样本的表达式,通过获取飞行器飞行过程中的运动数据并代入样本的表达式得到训练样本,最后通过训练样本对os-elm模型进行训练,得到训练完成后的气动力模型。通过采用os-elm模型,极大地简化了神经网络结构和参数更新过程,随着实时数据不断到达,输出权值可以在前一步的基础上递推而得,避免了输出权值的重新求解计算,且os-elm模型结构简单,对硬件条件要求不高,训练收敛速度快,使该气动力模型具有很好的工程应用价值。
70、使用os-elm模型不需要了解复杂的空气动力学原理,仅需要根据基本的飞行力学知识建立气动系数表达式,并分析对气动系数的影响因素来选取特征,能够简化建模前的准备工作。
71、os-elm模型在小幅值激励下训练得到的模型对大幅值激励的气动数据也具有很好的预测效果,意味着飞行器只需要在平衡点附近运动就能获得精度良好的全局气动力模型,有助于提高飞行试验的安全性。
- 还没有人留言评论。精彩留言会获得点赞!