肋骨线型拟合方法、装置、计算机设备和存储介质与流程
本技术涉及船用肋骨冷弯成型,特别是涉及一种肋骨线型拟合方法、装置、计算机设备和存储介质。
背景技术:
1、船舶在航行期间,船体、甲板所受的弯曲力会传递到肋骨上,承载能力取决于肋骨和船体之间的焊接情况,这就要求肋骨的线型尽可能贴合船体外形。在数控肋骨冷弯机的帮助下,能够按照船厂要求的肋骨线型弯制出高精度的肋骨。肋骨冷弯工艺一般分为4步:船厂提供肋骨线型数据文本,里面包含了肋骨需要经过的点以及各点的曲率半径,每根肋骨的点数一般在十几个或者几十个;将肋骨线型数据文本输入到前处理软件中,拟合出一条完整的肋骨线型;:根据检测距离s0、甩头(荒料)长度以及分割数n,利用弦线法求解出该肋骨的理论加工控制量长度l与角度θ;将理论加工控制量l与θ输入上位机,作为传感器的参考量,进行肋骨自动冷弯工作。其中线型拟合工作至关重要,高精度的拟合结果会产生高精度的l与θ,从而提高肋骨数控冷弯的精度。但是拟合过程中,未考虑船厂给定的曲率半径,无法严格经过全部给定点,这会降低拟合结果的可靠性。
技术实现思路
1、基于此,提供一种肋骨线型拟合方法、装置、计算机设备和存储介质,解决传统肋骨线型拟合方法无法严格经过全部给定点以及无法考虑曲率半径的技术问题。
2、一方面,提供一种肋骨线型拟合方法,所述方法包括:
3、获取肋骨线型数据文本文件和与之对应的肋骨加工参数的文本文件,其中肋骨线型数据文本文件包含了该肋骨经过的点以及各点的曲率半径数据;
4、在全局坐标系oxy下,根据肋骨所在平面内的一个点pi的与其相邻的点pi+1的坐标拟合出一条平面曲线,并构建平面曲线的曲率半径表达式;
5、解析方程组的解静定条件,指定平面曲线为三次曲线,平面曲线的公式为fi(x)=aix3+bix2+cix+di,其中ai、bi、ci和di是待求解的参数;
6、对平面曲线的公式利用坐标系转换进行降维处理,建立以pi为原点、为x轴方向的局部坐标系pixy,将肋骨曲线的平面曲线公式fi(x)=aix3+bix2+cix+di变换形成局部坐标系pixy三次曲线公式gi(x)=pix3+qix2+six+ti,获取局部坐标系pixy三次曲线公式上在相邻两个点pi与pi+1及其之间的两处坐标(li/4,hi,1)和(3li/4,hi,2)带入三次曲线公式gi(x)=pix3+qix2+six+ti列出四元一次方程组,计算出在pi与pi+1处的曲率半径;
7、优化hi,1和hi,2的初值以与各点的曲率半径数据匹配来获取坐标系pixy下pi与pi+1之间的曲线方程gi;
8、在曲线方程gi上任取一点(xm,ym)∈gi获取该点在全局坐标系oxy下的坐标值(xm,ym)计算公式,在计算公式中包含x轴相对x轴的旋转角度θi;
9、检验是否遍历完毕肋骨经过的所有点的曲率半径计算,并将所有的相邻两点的多段三次函数拼接得到pi与pi+1之间的肋骨曲线拟合算法,输出在全局坐标系oxy下拟合出的pi与pi+1之间的肋骨曲线的离散点数据(xm,ym)∈fi。
10、进一步的,所述获取肋骨线型数据文本文件和与之对应的肋骨加工参数的文本文件步骤包括:
11、获取所述肋骨线型数据文本的内容构成形成为:
12、
13、其中点数n为该肋骨经过的点的个数,每个点经过的坐标为x和y,每个点对应的曲率半径为r。
14、进一步的,所述在全局坐标系oxy下,根据肋骨所在平面内的一个点pi的与其相邻的点pi+1的坐标拟合出一条平面曲线,并构建平面曲线的曲率半径表达式步骤包括:
15、已知肋骨所在平面内一点pi(xi,yi,ri)和与其相邻的点pi+1(xi+1,yi+1,ri+1),其中i=1,2,…,n-1;
16、拟合出一条平面曲线y=fi(x),其中fi的下标“i”表示该曲线是pi与pi+1之间的,该曲线需要满足式:
17、
18、式中,ri代表fi的曲率半径。
19、进一步的,所述fi的曲率半径ri的表达式为
20、
21、其中,运算符d代表对fi的一次微分,d2代表对fi的二次微分。
22、进一步的,所述获取局部坐标系pixy三次曲线公式上在相邻两个点pi与pi+1及其之间的两处坐标(li/4,hi,1)和(3li/4,hi,2)带入三次曲线公式gi(x)=pix3+qix2+six+ti列出四元一次方程组,计算出在pi与pi+1处的曲率半径步骤包括:
23、将点pi的坐标(0,0)、点pi+1的坐标(l,0)及点pi与pi+1之间的两处坐标(li/4,hi,1)和(3li/4,hi,2)带入三次曲线公式gi(x)=pix3+qix2+six+ti列出四元一次方程组:
24、
25、当hi,1和hi,2确定后,代入四元一次方程组中即可解出pi、qi、si和ti,三次曲线gi即可确定,再计算出三次曲线gi在pi与pi+1处的曲率半径。
26、进一步的,所述优化hi,1和hi,2的初值以与各点的曲率半径数据匹配来获取坐标系pixy下pi与pi+1之间的曲线方程gi步骤包括:
27、获取船舶肋骨曲线曲率半径的期望数据;
28、根据船舶肋骨曲线曲率半径的期望数据,将hi,1和hi,2的初值定义为±0.01,正负号根据坐标(li/4,hi,1)和(3li/4,hi,2)所在y轴正负方向确定。
29、进一步的,所述坐标(li/4,hi,1)和(3li/4,hi,2)的hi,1和hi,2的初值选取公式为:
30、
31、式中的sign表示求正负号。
32、进一步的,所述在曲线方程gi上任取一点(xm,ym)∈gi获取该点在全局坐标系oxy下的坐标值(xm,ym)计算公式,在计算公式中包含x轴相对x轴的旋转角度θi步骤包括:
33、在曲线方程gi上任取一点(xm,ym)∈gi获取该点在全局坐标系oxy下的坐标值(xm,ym)计算公式:
34、
35、式中,代表绕着z轴旋转θi角度对应的旋转矩阵,其表达式为:
36、
37、进一步的,所述表达式中,θi代表了x绕着z轴转了θi角度后到达了x,θi的表达式为:
38、
39、式中,“·”代表向量内积,“|| ||”代表向量模长。
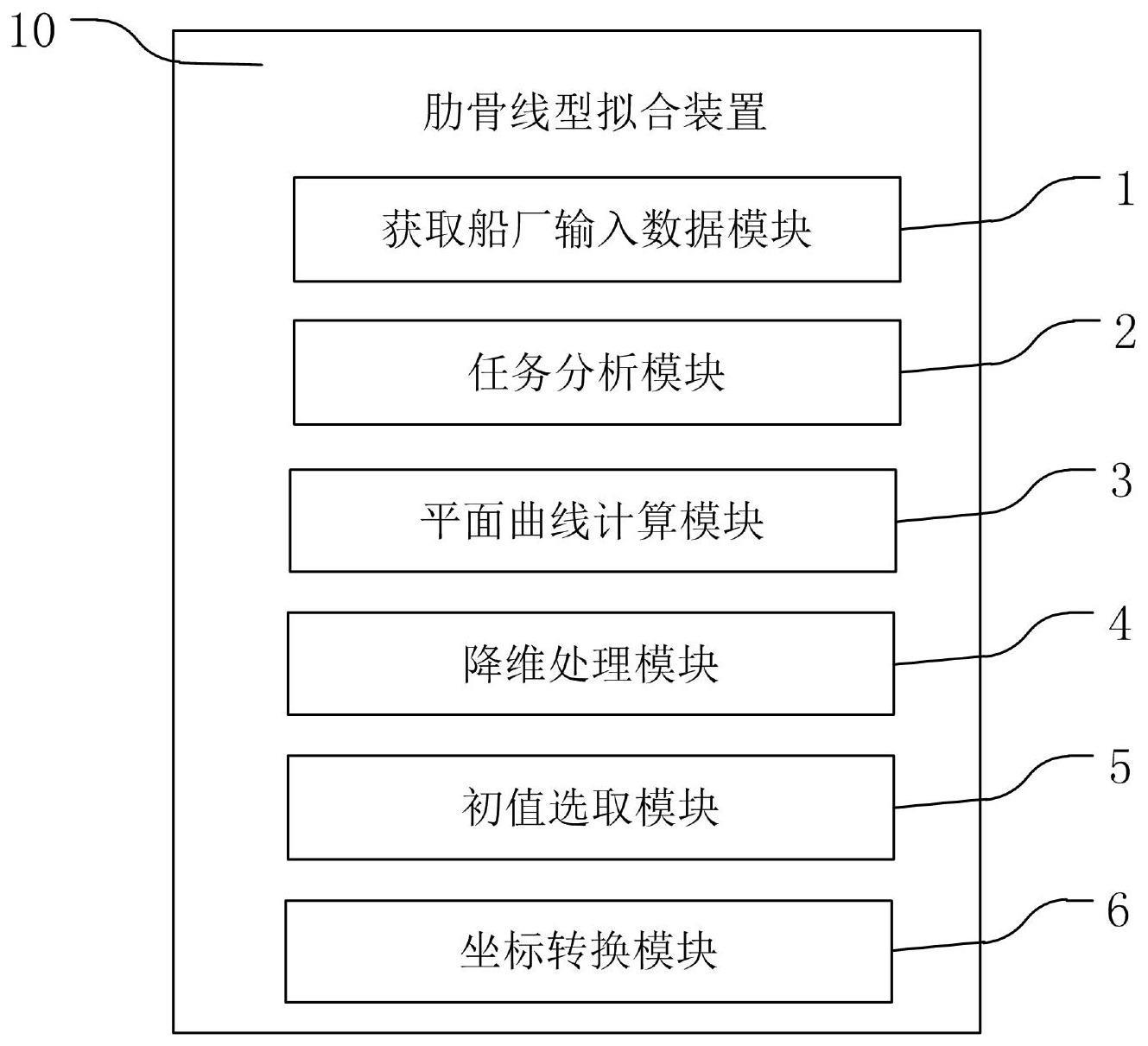
40、另一方面,提供了一种肋骨线型拟合装置,所述装置包括:
41、获取船厂输入数据模块,用于获取肋骨线型数据文本文件和与之对应的肋骨加工参数的文本文件,其中肋骨线型数据文本文件包含了该肋骨经过的点以及各点的曲率半径数据;
42、任务分析模块,用于在全局坐标系oxy下,根据肋骨所在平面内的一个点pi的与其相邻的点pi+1的坐标拟合出一条平面曲线,并构建平面曲线的曲率半径表达式;
43、平面曲线计算模块,用于解析方程组的解静定条件,指定平面曲线为三次曲线,平面曲线的公式为fi(x)=aix3+bix2+cix+di,其中ai、bi、ci和di是待求解的参数;
44、降维处理模块,用于对平面曲线的公式利用坐标系转换进行降维处理,建立以pi为原点、为x轴方向的局部坐标系pixy,将肋骨曲线的平面曲线公式fi(x)=aix3+bix2+cix+di变换形成局部坐标系pixy三次曲线公式gi(x)=pix3+qix2+six+ti,获取局部坐标系pixy三次曲线公式上在相邻两个点pi与pi+1及其之间的两处坐标(li/4,hi,1)和(3li/4,hi,2)带入三次曲线公式gi(x)=pix3+qix2+six+ti列出四元一次方程组,计算出在pi与pi+1处的曲率半径;
45、初值选取模块,用于优化hi,1和hi,2的初值以与各点的曲率半径数据匹配来获取坐标系pixy下pi与pi+1之间的曲线方程gi;
46、坐标转换模块,在gi上任取一点(xm,ym)∈gi获取该点在全局坐标系oxy下的坐标值(xm,ym)计算公式,在计算公式中包含x轴相对x轴的旋转角度θi;
47、整体算法拟合处理模块,用于检验是否遍历完毕肋骨经过的所有点的曲率半径计算,并将所有的相邻两点的多段三次函数拼接得到pi与pi+1之间的肋骨曲线拟合算法,输出在全局坐标系oxy下拟合出的pi与pi+1之间的肋骨曲线的离散点数据(xm,ym)∈fi。
48、再一方面,提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现前文所述肋骨线型拟合方法的步骤。
49、又一方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现前文所述肋骨线型拟合方法的步骤。
50、上述肋骨线型拟合方法、装置、计算机设备和存储介质,通过将整根肋骨线型看成多段的分段三次函数,每一段肋骨的已知条件为两端点的位置和两端点的曲率半径,即已知点的数目为四个,正好等于三次曲线的系数的个数,这就使得解是静定的。由于考虑了曲率半径,因此会使得方程组是非线性的,本技术提出了参数降维以及坐标系局部化,解决了非线性方程的高精度求解问题,实现了输出的肋骨曲线经过全部给定点并具有曲率半径参数。
- 还没有人留言评论。精彩留言会获得点赞!