缺陷的分类方法及装置与流程
本技术涉及半导体,尤其涉及一种缺陷的分类方法及装置。
背景技术:
1、随着科学技术的快速发展,半导体芯片在生产生活中的比重越来越大。受制备工艺的影响,高端芯片良率一直是无法逃避的话题,缺陷分类提供了改进工艺所必需的信息,其在提高芯片良率中起着不可或缺的作用。
2、相关技术中,在进行缺陷分类时,需要操作员对检测到的缺陷进行观察,通过缺陷的外形与来源或可能造成的后果做分类,而人工分类的过程一般比较耗时,而且由于人工分类的标准不同,可能会产生错误的分类结果,从而导致缺陷分类准确性也不高。由此,如何提高缺陷分类的准确性,显得至关重要。
技术实现思路
1、本技术提供一种缺陷的分类方法及装置。
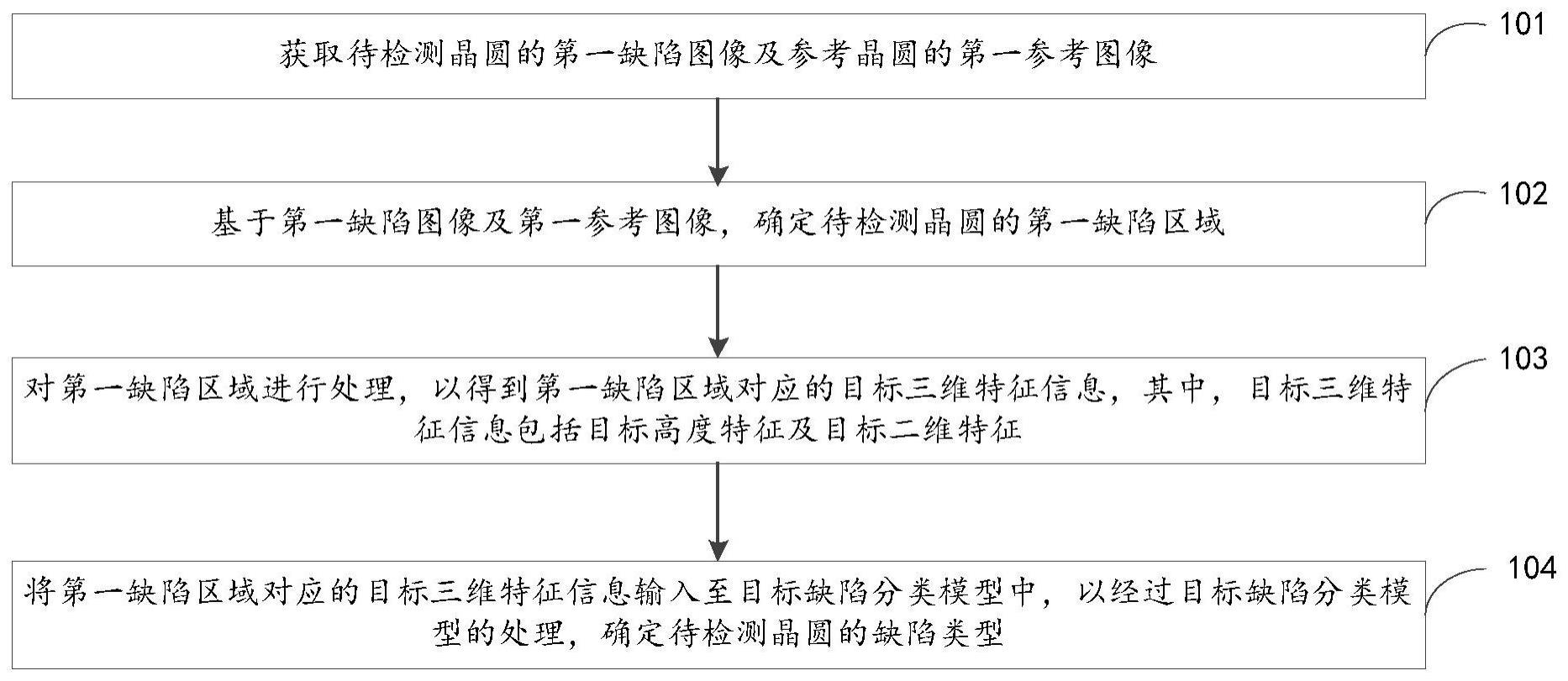
2、根据本技术的第一方面,提供一种缺陷的分类方法,该方法包括:获取待检测晶圆的第一缺陷图像及参考晶圆的第一参考图像;基于所述第一缺陷图像及所述第一参考图像,确定所述待检测晶圆的第一缺陷区域;对所述第一缺陷区域进行处理,以得到所述第一缺陷区域对应的目标三维特征信息,其中,所述目标三维特征信息包括目标高度特征及目标二维特征;将所述第一缺陷区域对应的目标三维特征信息输入至目标缺陷分类模型中,以经过所述目标缺陷分类模型的处理,确定所述待检测晶圆的缺陷类型。
3、在一些实施方式中,所述对所述第一缺陷区域进行处理,以得到所述第一缺陷区域对应的目标三维特征信息,包括:基于所述第一缺陷区域中每个像素点的像素值,确定第一阴影区域;基于所述第一阴影区域及比例系数,确定所述第一缺陷区域对应的目标高度特征;基于所述第一缺陷区域,确定所述第一缺陷区域对应的目标二维特征。
4、在一些实施方式中,所述基于所述第一缺陷区域中每个像素点的像素值,确定第一阴影区域,包括:基于所述第一缺陷图像中每个像素点的像素值,确定平均像素值;将所述第一缺陷区域中像素值与平均像素值满足预设关系的像素点所在的区域,确定为第一阴影区域。
5、在一些实施方式中,所述基于所述第一阴影区域及比例系数,确定所述第一缺陷区域对应的目标高度特征,包括:对所述第一阴影区域进行逐行扫描,以获取所述第一阴影区域对应的第一扫描图像;根据所述第一扫描图像,确定每行对应的第一阴影区域包含的像素点个数;根据标准晶圆的第二参考图像,确定比例系数;以指定像素值为基准值,基于所述比例系数及每行对应的第一阴影区域包含的像素点个数,确定每行对应的第一阴影区域相对于所述指定像素值的高度差值;基于每行对应的第一阴影区域相对于所述指定像素值的高度差值,确定所述第一缺陷区域对应的目标高度特征。
6、在一些实施方式中,所述根据标准晶圆的第二参考图像,确定比例系数,包括:获取标准晶圆对应的第二参考图像;基于所述第二参考图像中每个像素点的像素值,确定所述第二参考图像对应的第二阴影区域;基于所述第二阴影区域包含的像素点数量及所述标准晶圆的物理高度,确定比例系数。
7、在一些实施方式中,所述第一缺陷图像及第一参考图像在数量上均为多个,所述以指定像素值为基准值,基于所述比例系数及每行对应的第一阴影区域包含的像素点个数,确定每行对应的第一阴影区域相对于所述指定像素值的高度差值,包括:以指定像素值为基准值,基于所述比例系数及每个所述第一缺陷图像中每行对应的像素点个数,确定每个所述第一缺陷图像中每行对应的第一阴影区域相对于所述指定像素值的高度差值;将多个所述第一缺陷图像分别对应的高度差值进行合并处理,以确定每行对应的第一阴影区域相对于所述指定像素值的高度差值。
8、在一些实施方式中,所述目标二维特征包括图形特征和统计特征,所述基于所述第一缺陷区域,确定所述第一缺陷区域对应的目标二维特征,包括:对所述第一缺陷区域包含的图形信息进行处理,以确定所述第一缺陷区域对应的图形特征;对所述第一缺陷区域包含的像素信息处理,以确定所述缺陷区域对应的统计特征。
9、在一些实施方式中,所述将所述第一缺陷区域对应的目标三维特征信息输入至目标缺陷分类模型中,以经过所述目标缺陷分类模型的处理,确定所述待检测晶圆的缺陷类型,包括:获取训练数据集,其中,所述训练数据集包括已标注缺陷分类标签的第三缺陷图像以及对应的第三参考图像;基于所述第三缺陷图像以及对应的第三参考图像,确定所述第三缺陷图像对应的参考三维特征信息,其中,所述参考三维特征信息包括参考高度特征及参考二维特征;利用所述训练数据集对应的参考三维特征信息对初始分类模型进行训练,以得到目标缺陷分类模型;将所述第一缺陷区域对应的目标三维特征信息输入至所述目标缺陷分类模型中,以经过所述目标缺陷分类模型的处理,确定所述待检测晶圆的缺陷类型。
10、在一些实施方式中,所述基于所述第三缺陷图像以及对应的第三参考图像,确定所述第三缺陷图像对应的参考三维特征信息,包括:基于所述第三缺陷图像及所述第三参考图像,确定所述第三缺陷图像对应的第三缺陷区域;对所述第三缺陷区域进行处理,以得到所述第三缺陷区域对应的参考三维特征信息。
11、根据本技术的第二方面,提供一种缺陷的分类装置,其包括:获取模块,用于获取待检测晶圆的第一缺陷图像及参考晶圆的第一参考图像;第一确定模块,用于基于所述第一缺陷图像及所述第一参考图像,确定所述待检测晶圆的第一缺陷区域;处理模块,用于对所述第一缺陷区域进行处理,以得到所述第一缺陷区域对应的目标三维特征信息,其中,所述目标三维特征信息包括目标高度特征及目标二维特征;第二确定模块,用于将所述第一缺陷区域对应的目标三维特征信息输入至目标缺陷分类模型中,以经过所述目标缺陷分类模型的处理,确定所述待检测晶圆的缺陷类型。
12、在一些实施方式中,所述处理模块包括:第一确定单元用于基于所述第一缺陷区域中每个像素点的像素值,确定第一阴影区域;第二确定单元用于基于所述第一阴影区域及比例系数,确定所述第一缺陷区域对应的目标高度特征;第三确定单元用于基于所述第一缺陷区域,确定所述第一缺陷区域对应的目标二维特征。
13、在一些实施方式中,所述第一确定单元具体用于:基于所述第一缺陷图像中每个像素点的像素值,确定平均像素值;将所述第一缺陷区域中像素值与平均像素值满足预设关系的像素点所在的区域,确定为第一阴影区域。
14、在一些实施方式中,所述第二确定单元包括:扫描子单元用于对所述第一阴影区域进行逐行扫描,以获取所述第一阴影区域对应的第一扫描图像;第一确定子单元用于根据所述第一扫描图像,确定每行对应的第一阴影区域包含的像素点个数;第二确定子单元用于根据标准晶圆的第二参考图像,确定比例系数;第三确定子单元用于以指定像素值为基准值,基于所述比例系数及每行对应的第一阴影区域包含的像素点个数,确定每行对应的第一阴影区域相对于所述指定像素值的高度差值;第四确定子单元用于基于每行对应的第一阴影区域相对于所述指定像素值的高度差值,确定所述第一缺陷区域对应的目标高度特征。
15、在一些实施方式中,所述第二确定子单元具体用于:获取标准晶圆对应的第二参考图像;基于所述第二参考图像中每个像素点的像素值,确定所述第二参考图像对应的第二阴影区域;基于所述第二阴影区域包含的像素点数量及所述标准晶圆的物理高度,确定比例系数。
16、在一些实施方式中,所述第一缺陷图像及第一参考图像在数量上均为多个,所述第三确定子单元具体用于:以指定像素值为基准值,基于所述比例系数及每个所述第一缺陷图像中每行对应的像素点个数,确定每个所述第一缺陷图像中每行对应的第一阴影区域相对于所述指定像素值的高度差值;将多个所述第一缺陷图像分别对应的高度差值进行合并处理,以确定每行对应的第一阴影区域相对于所述指定像素值的高度差值。
17、在一些实施方式中,所述目标二维特征包括图形特征和统计特征,所述第三确定单元具体用于:对所述第一缺陷区域包含的图形信息进行处理,以确定所述第一缺陷区域对应的图形特征;对所述第一缺陷区域包含的像素信息处理,以确定所述缺陷区域对应的统计特征。
18、在一些实施方式中,所述第二确定模块包括:获取单元用于获取训练数据集,其中,所述训练数据集包括已标注缺陷分类标签的第三缺陷图像以及对应的第三参考图像;第四确定单元用于基于所述第三缺陷图像以及对应的第三参考图像,确定所述第三缺陷图像对应的参考三维特征信息,其中,所述参考三维特征信息包括参考高度特征及参考二维特征;训练单元用于利用所述训练数据集对应的参考三维特征信息对初始分类模型进行训练,以得到目标缺陷分类模型;第五确定单元用于将所述第一缺陷区域对应的目标三维特征信息输入至所述目标缺陷分类模型中,以经过所述目标缺陷分类模型的处理,确定所述待检测晶圆的缺陷类型。
19、在一些实施方式中,所述第四确定单元具体用于:基于所述第三缺陷图像及所述第三参考图像,确定所述第三缺陷图像对应的第三缺陷区域;对所述第三缺陷区域进行处理,以得到所述第三缺陷区域对应的参考三维特征信息。
20、根据本技术的第三方面,提供一种电子设备,电子设备包括:处理器以及存储有计算机程序指令的存储器;处理器执行计算机程序指令时实现上述的任一种缺陷的分类方法。
21、根据本技术的第四方面,提供一种计算机可读存储介质,其特征在于,计算机可读存储介质上存储有计算机程序指令,计算机程序指令被处理器执行时实现上述的任一种缺陷的分类方法。
22、综上所述,本技术提供的缺陷的分类方法及装置,至少具有以下有益效果:可以先获取待检测晶圆的第一缺陷图像及参考晶圆的第一参考图像,之后可以基于第一缺陷图像及第一参考图像,确定待检测晶圆的第一缺陷区域,之后再对第一缺陷区域进行处理,以得到第一缺陷区域对应的目标三维特征信息,其中,目标三维特征信息包括目标高度特征及目标二维特征,之后将第一缺陷区域对应的目标三维特征信息输入至目标缺陷分类模型中,以经过目标缺陷分类模型的处理,确定待检测晶圆的缺陷类型。由此,在确定晶圆缺陷类型的过程中,可以先确定出待检测晶圆的第一缺陷区域,之后对其进行处理,以得到对应的目标三维特征信息,之后再基于该目标三维特征信息及目标缺陷分类模型,可以确定出对应的缺陷类型,也即在缺陷分类过程中,充分考虑到了三维特征信息,从而可以使得确定出的缺陷分类更为准确与可靠,进而为工艺改进及提高晶圆良率提供了条件。
- 还没有人留言评论。精彩留言会获得点赞!