一种水下空腔噪声控制方法、装置及介质
本发明涉及传感器。尤其涉及一种水下空腔噪声控制方法、装置及介质。
背景技术:
1、海洋作为主要边疆和走向世界海域的必经战略通道,复杂的海洋环境和复杂化的战略任务需求对新一代水下航行器的性能提出了更高的要求。而如何提高水下航行器的隐蔽性,又成为了发展新一代水下航行装备和武器的研究重点。因此,不断强化水下航行器的隐蔽性已经成为提高海洋装备性能、海军综合突防能力的重要途径。
2、空腔广泛存在于水下航行器的开孔部位,当航行器表面湍流边界层流经这些开孔时,在空腔口形成流动剪切层,剪切层会空腔口的导边、随边以及空腔内流体的相互作用,会在腔口形成较为剧烈的自持振荡,引起较大的速度和压力脉动,进而产生较为强烈的空腔噪声,严重影响水下航行器的隐蔽性。
3、现有的空腔噪声控制方法主要是在空腔前安装扰流装置,改变空腔前缘处的湍流剪切层,从而实现空腔噪声的抑制,如中国专利文献公开的cn112699470a、cn114822464a等专利技术,但这些装置的安装位置与尺寸与来流速度紧密相关,很难实现在不同航速下的灵活改变。
4、如何实现在不同航速下的灵活有效的抑制涡流与空腔的相互作用,以降低水下航行器空腔噪声,是亟需解决的问题。
技术实现思路
1、本发明提供一种水下空腔噪声控制方法、装置及介质。以解决在不同航速下灵活有效的抑制涡流与空腔的相互作用,以降低水下航行器空腔噪声的问题。
2、为实现上述目的,本发明提供一种水下空腔噪声控制方法,用于空腔噪声控制装置中,所述空腔噪声控制装置包括一空腔、设置于所述空腔一侧的喷水机构和所述喷水机构的控制系统,包括:
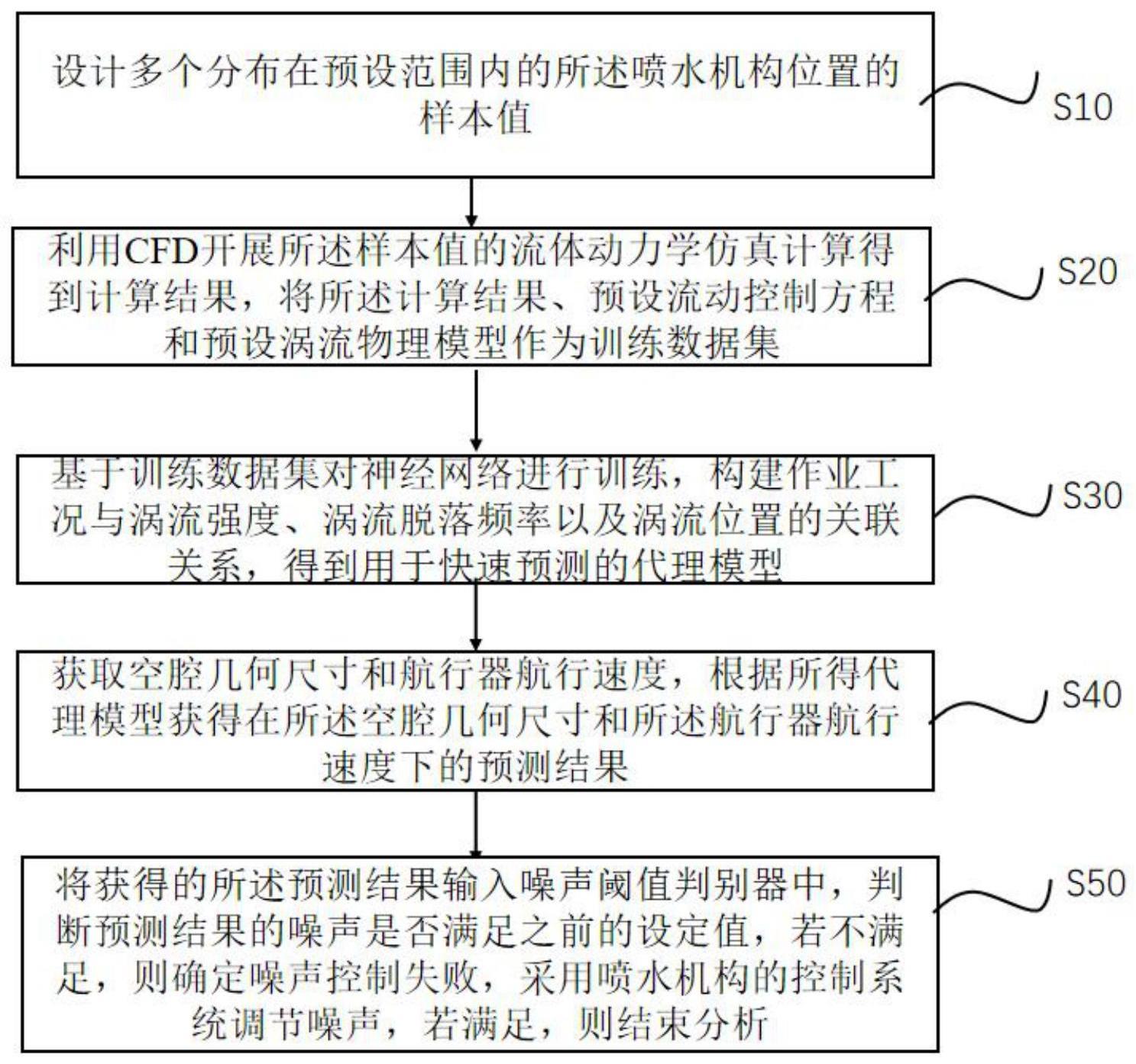
3、设计多个分布在预设范围内的所述喷水机构位置的样本值;
4、利用cfd(computational fluid dynamics,计算流体动力学)开展流体动力学仿真计算得到计算结果,将所述计算结果、预设流动控制方程和预设涡流物理模型作为训练数据集;
5、基于训练数据集对神经网络进行训练,构建作业工况与涡流强度、涡流脱落频率以及涡流位置的关联关系,得到用于快速预测的代理模型;
6、获取空腔几何尺寸和航行器航行速度,根据所得代理模型获得在所述空腔几何尺寸和所述航行器航行速度下的预测结果,其中,所述预测结果至少包括涡流强度、涡流脱落频率和涡流位置的信息;
7、将获得的所述预测结果输入噪声阈值判别器中,判断预测结果的噪声是否满足之前的设定值,若不满足,则确定噪声控制失败,采用所述喷水机构的控制系统调节噪声,若满足,则结束分析。
8、优选的,所述确定噪声控制失败后还包括:将获取的预测结果反馈喷水机构的控制系统,通过该系统来调节喷水机构的喷水口张角、喷水速度和机构倾角;
9、对调节后流场的涡流信息利用所述噪声阈值判别器做进一步的判断,如果不满足要求,则需要下一轮的调节,直至满足所述设定值。
10、优选的,所述判断预测结果的噪声是否满足之前的设定值,具体包括:所述噪声阈值判别器基于所述预测结果判断噪声主频的幅值,判断预测结果的噪声主频的幅值是否满足之前的设定值。
11、优选的,所述预设流动控制方程主要包括连续性方程、动量守恒方程以及vof模型的相分数方程:
12、
13、
14、式中,u表示速度矢量;p表示当地压力;i表示单位张量;μm表示混合物粘度,μm=(1-αa)μl+αaμa;ρm表示混合物密度,ρm=(1-αa)ρl+αaρa;μl和μa分别表示液体和气体的粘度;ρl和ρa分别表示液体和气体的密度;αa表示气体的体积分数。
15、vof模型的相分数方程为:
16、
17、式中,α表示计算域内各网格单元的相分数。
18、所述预设涡流物理模型,利用q准则对涡进行识别和判断,
19、
20、式中,u表示x方向的速度、v表示y方向的速度,w表示z方向的速度。
21、优选的,所述基于训练数据集对神经网络进行训练,构建作业工况与涡流强度、涡流脱落频率以及涡流位置的关联关系,得到用于快速预测的代理模型,具体包括:
22、网络搭建过程中采用深度神经算子神经网络:网络输入u基于自变量控制,输入于另一自变量控制,并使用分支网branchnet和主干网trunknet分别表示所述网络输入u经过流形g作用后在位置处的值,其统一公式得到:
23、
24、其中,u(x1),u(x2),...,u(xm)为用于训练算子g(u)的函数组,自变量为空腔流速及其他监测数据,m为该数据的维度,为算子的自变量,bk为分支网branchnet的变换,tk为主干网trunknet的变换。
25、两组数据和作为模型的输入,网络需要两个部分(分支网branch net和主干网trunknet)分别处理,其中主干网trunknet以作为输入,输出分支网branchnet以作为输入,输出最后将两个网络结果相乘得到目标学习的算子。
26、深度学习神经算子的bruchnet是由编码算子和逼近算子复合得到,加入使用深度学习算子n来逼近函数g,定义其中的误差函数,通过考虑概率测度定义l2范数:
27、
28、网络的训练过程为:
29、网络的训练将所述计算结果和所述预设流动控制方程得到的运动数据和对应监测数据作为自变量输入,将所述预设涡流物理模型的涡流物理特性参数作为自变量输入,输出得到涡流特性与空间坐标,形成一个用于空腔涡流物理特性参数智能识别的深度算子;
30、将所述航行器航行速度、空腔几何尺寸和空腔涡流的深度算子神经网络输出作为输入数据,输出得到涡流强度、脱落频率与空间位置,训练以形成用于快速预测的代理模型。
31、优选的,空腔噪声控制装置还包括位于所述空腔一侧壁的吸水系统、位于所述空腔另一侧壁的喷水机构、喷水管道、管道控制阀和喷水机构控制系统;其中,所述吸水系统通过所述喷水管道和喷水机构连接,所述管道控制阀和所述喷水机构控制系统安装在所述喷水管道中。
32、优选的,喷水机构位置样本值为x/l,其中,x为喷水机构与空腔底部的距离,l为空腔顶部到底部的距离;所述设计多个分布在预设范围内的所述喷水机构位置的样本值,具体为:设计预设数量分布在预设范围内的x/l样本值,其中,所述样本值取值范围在[0.2,0.8]之间。
33、第二方面,本发明还涉及一种水下空腔噪声控制装置,用于空腔噪声控制装置,所述空腔噪声控制装置包括一空腔、设置于所述空腔一侧的喷水机构和所述喷水机构的控制系统,包括:
34、样本采集模块,用于设计预设数量分布在预设范围内的x/l样本值,其中,x为喷水机构与空腔底部的距离,l为空腔顶部到底部的距离;
35、仿真模块,用于利用cfd开展流体动力学仿真计算得到计算结果,将所述计算结果、预设流动控制方程和预设涡流物理模型作为训练数据集;
36、模型生成模块,用于基于训练数据集对神经网络进行训练,构建作业工况与涡流强度、涡流脱落频率以及涡流位置的关联关系,得到用于快速预测的代理模型;
37、预测模块,用于获取空腔几何尺寸和航行器航行速度,根据所得代理模型获得在所述空腔几何尺寸和所述航行器航行速度下的预测结果,其中,所述预测结果至少包括涡流强度、涡流脱落频率和涡流位置的信息;
38、噪声阈值判别模块,将获得的所述预测结果,判断预测结果的噪声是否满足之前的设定值,若不满足,则确定噪声控制失败,采用所述喷水机构的控制系统调节噪声,若满足,则结束分析。
39、优选的,空腔噪声控制装置还包括:位于所述空腔一侧壁的吸水系统、位于所述空腔另一侧壁的喷水机构、喷水管道、管道控制阀和喷水机构控制系统;其中,所述吸水系统通过所述喷水管道和喷水机构连接,所述管道控制阀和所述喷水机构控制系统安装在所述喷水管道中。
40、第三方面,本发明还涉及一种计算机可读存储介质,存储介质中存储有指令,所述指令运行时执行上述的一种水下空腔噪声控制方法。
41、本发明涉及的一种水下空腔噪声控制方法、装置及介质,相比于现有技术,有以下有益效果:
42、基于训练数据集对神经网络进行训练得到快速预测的代理模型,通过已训练完成的参数集实现快速输出预测结果,根据输入条件快速得到当前条件下的空腔涡流物理特性参数,用于水下空腔涡流强度、脱落频率和空间位置的快速预报,为空腔噪声的控制提供基础,并通过喷水射流的方式调整达到降噪效果,以提高不同航速和空腔尺寸下降低水下航行器空腔噪声的灵活性和有效性。
- 还没有人留言评论。精彩留言会获得点赞!