一种分修隧道智能会车调度方法及系统与流程
本发明涉及会车调度,具体涉及一种分修隧道智能会车调度方法及系统。
背景技术:
1、在分修隧道施工中,需要车辆在隧道中进行作业,比如运输矿石等,隧道内的车道较窄难以实现两辆车并行通过,为了最大化利用车道,并提高车辆通行效率,在固定位置专门设置了会车点,当来车发现对向有车辆驶来时,可在会车点暂时等待,从而解决隧道内双向多车通过的问题。
2、目前,现有技术中进行会车时,大多根据车辆至会车点的距离,进行会车调度,对于车辆本身的作业、行驶特征的分析不足,进而导致存在会车调度效果不佳,影响车辆作业效率的技术问题。
技术实现思路
1、本发明提供了一种分修隧道智能会车调度方法及系统,用以解决现有技术中存在会车调度效果不佳,影响车辆作业效率的技术问题。
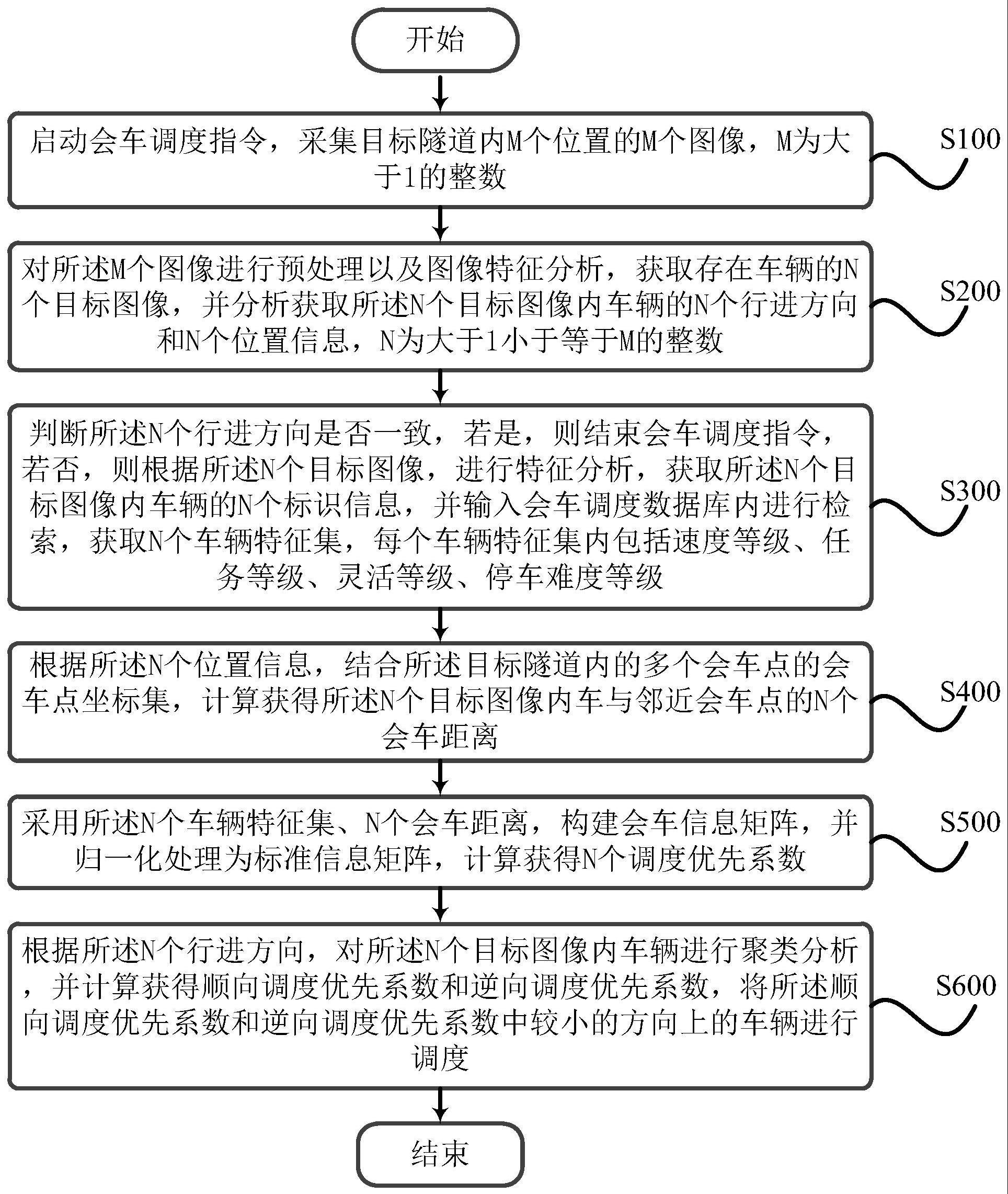
2、根据本发明的第一方面,提供了一种分修隧道智能会车调度方法,包括:启动会车调度指令,采集目标隧道内m个位置的m个图像,m为大于1的整数;对所述m个图像进行预处理以及图像特征分析,获取存在车辆的n个目标图像,并分析获取所述n个目标图像内车辆的n个行进方向和n个位置信息,n为大于1小于等于m的整数;判断所述n个行进方向是否一致,若是,则结束会车调度指令,若否,则根据所述n个目标图像,进行特征分析,获取所述n个目标图像内车辆的n个标识信息,并输入会车调度数据库内进行检索,获取n个车辆特征集,每个车辆特征集内包括速度等级、任务等级、灵活等级、停车难度等级;根据所述n个位置信息,结合所述目标隧道内的多个会车点的会车点坐标集,计算获得所述n个目标图像内车与邻近会车点的n个会车距离;采用所述n个车辆特征集、n个会车距离,构建会车信息矩阵,并归一化处理为标准信息矩阵,计算获得n个调度优先系数;根据所述n个行进方向,对所述n个目标图像内车辆进行聚类分析,并计算获得顺向调度优先系数和逆向调度优先系数,将所述顺向调度优先系数和逆向调度优先系数中较小的方向上的车辆进行调度。
3、根据本发明的第二方面,提供了一种分修隧道智能会车调度系统,包括:图像采集模块,所述图像采集模块用于启动会车调度指令,采集目标隧道内m个位置的m个图像,m为大于1的整数;图像特征分析模块,所述图像特征分析模块用于对所述m个图像进行预处理以及图像特征分析,获取存在车辆的n个目标图像,并分析获取所述n个目标图像内车辆的n个行进方向和n个位置信息,n为大于1小于等于m的整数;车辆特征分析模块,所述车辆特征分析模块用于判断所述n个行进方向是否一致,若是,则结束会车调度指令,若否,则根据所述n个目标图像,进行特征分析,获取所述n个目标图像内车辆的n个标识信息,并输入会车调度数据库内进行检索,获取n个车辆特征集,每个车辆特征集内包括速度等级、任务等级、灵活等级、停车难度等级;会车距离计算模块,所述会车距离计算模块用于根据所述n个位置信息,结合所述目标隧道内的多个会车点的会车点坐标集,计算获得所述n个目标图像内车与邻近会车点的n个会车距离;调度优先系数计算模块,所述调度优先系数计算模块用于采用所述n个车辆特征集、n个会车距离,构建会车信息矩阵,并归一化处理为标准信息矩阵,计算获得n个调度优先系数;车辆调度模块,所述车辆调度模块用于根据所述n个行进方向,对所述n个目标图像内车辆进行聚类分析,并计算获得顺向调度优先系数和逆向调度优先系数,将所述顺向调度优先系数和逆向调度优先系数中较小的方向上的车辆进行调度。
4、根据本发明采用的一个或多个技术方案,其可达到的有益效果如下:
5、通过采集目标隧道存在车辆的n个目标图像,并分析获取n个目标图像内车辆的n个行进方向和n个位置信息,判断n个行进方向是否一致,若是,则结束会车调度指令,若否,则根据n个目标图像,进行特征分析,获取n个目标图像内车辆的n个标识信息,并输入会车调度数据库内进行检索,获取n个车辆特征集,每个车辆特征集内包括速度等级、任务等级、灵活等级、停车难度等级,根据n个位置信息,结合目标隧道内的多个会车点的会车点坐标集,计算获得n个目标图像内车与邻近会车点的n个会车距离,采用n个车辆特征集、n个会车距离,构建会车信息矩阵,并归一化处理为标准信息矩阵,计算获得n个调度优先系数,根据n个行进方向,对n个目标图像内车辆进行聚类分析,并计算获得顺向调度优先系数和逆向调度优先系数,将顺向调度优先系数和逆向调度优先系数中较小的方向上的车辆进行调度,达到降低会车对车辆作业效率的影响,提升车辆调度效果,进而提升隧道内的车辆作业效率的技术效果。
6、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其他特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种分修隧道智能会车调度方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,对所述m个图像进行预处理以及图像特征分析,获取存在车辆的n个目标图像,包括:
3.根据权利要求2所述的方法,其特征在于,分析获取所述n个目标图像内车辆的n个行进方向和n个位置信息,包括:
4.根据权利要求1所述的方法,其特征在于,则根据所述n个目标图像,进行特征分析,获取所述n个目标图像内车辆的n个标识信息,并输入会车调度数据库内进行检索,获取n个车辆特征集,包括:
5.根据权利要求1所述的方法,其特征在于,根据所述n个位置信息,结合所述目标隧道内的多个会车点的会车点坐标集,计算获得所述n个目标图像内车与最邻近会车点的n个会车距离,包括:
6.根据权利要求1所述的方法,其特征在于,采用所述n个车辆特征集、n个会车距离,构建会车信息矩阵,并归一化处理为标准信息矩阵,包括:
7.根据权利要求6所述的方法,其特征在于,计算获得n个调度优先系数,包括:
8.一种分修隧道智能会车调度系统,其特征在于,用于执行权利要求1至7所述的一种分修隧道智能会车调度方法中任意一项方法的步骤,所述系统包括:
技术总结
本发明提供了一种分修隧道智能会车调度方法及系统,涉及会车调度技术领域,该方法包括:采集目标隧道内的M个图像;获取存在车辆的N个目标图像,并获取N个行进方向和N个位置信息;获取N个车辆特征集;获得N个会车距离;构建会车信息矩阵,并归一化处理为标准信息矩阵,计算获得N个调度优先系数;计算获得顺向调度优先系数和逆向调度优先系数,将顺向调度优先系数和逆向调度优先系数中较小的方向上的车辆进行调度,解决了现有技术中存在会车效果不佳,影响车辆作业效率的技术问题,实现对车辆会车调度的优先级分析,进而达到提升会车效果,进而达到降低会车对车辆作业效率的影响,提升隧道内车辆的作业效率的技术效果。
技术研发人员:彭良学,胡文渊,何宏盛,张杰胜,王亚辉,赵宁,李继鹏,李明智,孙明明,余海生,王海飞,周香宇,吴嘉良,汤渠程,马闯
受保护的技术使用者:中铁四局集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!