一种车辆自动泊车辅助控制系统及装置的制作方法
本发明涉及自动泊车系统,具体为一种车辆自动泊车辅助控制系统及装置。
背景技术:
1、目前一些高端的汽车,会搭载自动泊车系统,解决了使用者泊车技术不足的问题,但是户外不同场地的停车位,存在很多的问题,最常见的问题是很多车位的尺寸不规范,自动泊车系统通常需要在预设的环境条件下操作,例如标准的停车位大小和形状。在复杂或非标准的停车场环境中,自动泊车系统可能无法适应,导致无法正确执行停车操作。
2、中国专利cn111942373b提供了一种自动泊车方法、自动泊车装置和车辆,在识别出车位为低置信度车位或窄车位,且低置信度车位或窄车位确定为泊车车位的情况下,通过发出使用遥控泊车功能的提示信息,使得用户可以进行选择,提升了用户体验和实现了更智能的自动泊车;
3、但是该方法只能在识别出车位后对低置信度车位或窄车位进行选择,但是在选择后强行使用自动泊车系统泊车时,仍然存在不能很好适应不规范车位,达到准确停车的效果。
4、且现有一些场地,会为了提高场地利用率,将车位设置于坡面上,而现有的车辆自动泊车系统,对于复杂驾驶场景的处理能力有限:自动泊车系统通常适用于直线或简单的驾驶场景,但在处理复杂的驾驶场景(如斜坡、狭窄的停车位等)时可能遇到困难,这可能导致停车操作的失败或出现错误。
5、由于现有的自动泊车系统是依靠图像进行识别,是利用车体上的摄像头由点到面进行拍摄,类似于投影式,从高处斜拍地面时,车库线并非成像为矩形,而是类似梯形,而对于不同坡度的库线,在平地上拍摄时,会有更多的变形,但是图像识别不出坡度的影响,进而会影响系统对库线尺寸的判断,在停车时会由于动力不足导致无法顺利上坡,或尺寸判断失误导致不能准确泊入的问题。
技术实现思路
1、针对现有技术的不足,本发明提供了一种车辆自动泊车辅助控制系统及装置,解决了现有自动泊车系统对于尺寸不规范的车库,不能较好的适应,进而不能保证准确停车,尤其是对于坡面的车库,会进一步增加难度的问题。
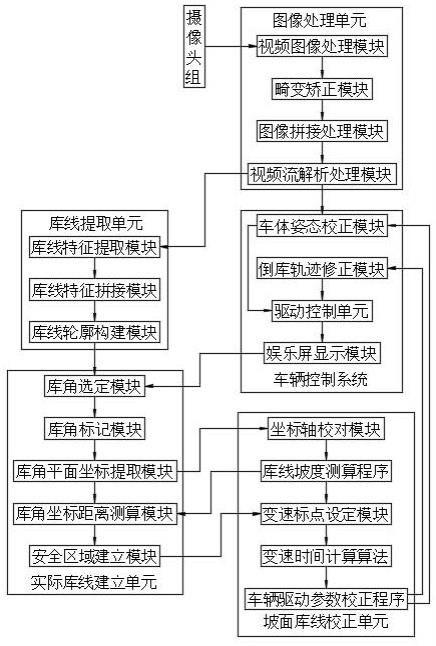
2、为实现以上目的,本发明通过以下技术方案予以实现:一种车辆自动泊车辅助控制系统,包括摄像头组、图像处理单元和车辆控制系统,还包括库线提取单元、实际库线建立单元和坡面库线校正单元;
3、图像处理单元:用于对摄像头组采集的视频图像进行处理,并将图像数据传输至库线提取单元和车辆控制系统对库线特征进行识别和对车辆参数进行识别控制;
4、库线提取单元:对图像内疑似库线的特征进行识别提取,并对间断特征进行延伸拼接构建规则库线轮廓;
5、实际库线建立单元:通过车辆系统内设定的坐标系对库线提取单元提取出的库线四角进行坐标标定,并计算与坐标系原点的距离,同时在现有库线基础上等距离扩展建立预留的安全区域;
6、车辆控制系统:用于定位车身姿态并确定矫正参数,对车体入库轨迹参数进行确定,并利用车身矫正参数结合入库轨迹参数控制车辆驱动系统运转进行入库操作,同时输出车身姿态、入库轨迹和视觉图像至娱乐屏上显示;
7、坡面库线校正单元:包括坐标轴校对模块、库线坡度测算程序、变速标点设定模块、变速时间计算算法和车辆驱动参数校正程序,所述坐标轴校对模块用于对实际库线建立单元建立的一侧边两库角坐标与坐标系y轴进行对比,利用库线坡度测算程序对图像内库线侧边与坐标系y轴的偏离度进行计算,确定实际库线侧边与水平地面的坡度。
8、优选的,设定库线侧边的一入库角为o点,另一入库角设定为a点,并将坐标系原点移动至o点,将该侧边另一库角点向x轴和z轴方向作引线,在x轴和z轴上形成的两个交点分别标记为b点和c点,oa即为库的宽度,其长度标记为l1,ob即为库的长度,其长度标记为l2,oc的长度标记为l3,该库线侧边相对于地面的坡度角设定为q,则q的计算公式为::
9、;
10、即 ;
11、设定o点所处侧边的内库角设定为e点,设oe长度为l5,则l5长度为:
12、;
13、在y轴上作出距离o点为l5的一点为f点,取of中点为d点,以d点作为参照点,在车尾到达与d点处于同一x轴位置时控制车辆减速,减速前速度设定匀速为v,设定od距离设置为l4,则l4长度为:
14、 ;
15、从车尾入库开始到达到减速点的时间t为:
16、;
17、车尾入库开始t时间后开始减速至停下。
18、优选的,所述图像处理单元:包括视频图像处理模块、畸变矫正模块、图像拼接处理模块和视频流解析处理模块,所述视频图像依次经过视频图像处理模块、畸变矫正模块、图像拼接处理模块和视频流解析处理模块进行图像亮度、清晰度,锐化度、对比度处理,图像歪斜畸变矫正处理,多摄像头图像的拼接处理,视频流解析处理。
19、优选的,所述库线处理单元包括库线特征提取模块、库线特征拼接模块和库线轮廓构建模块,所述库线特征提取模块提取图像内疑似库线的特征,并分离出规则的符合四边形轨迹的特征,所述库线特征拼接模块对提取的特征进行连接延伸拼接,所述库线轮廓构建模块依据拼接成的四边形轨迹构建库线模拟轮廓线。
20、优选的,所述实际库线建立单元包括库角选定模块、库角标记模块、库角平面坐标提取模块、库角坐标距离测算模块和安全区域建立模块,所述库角选定模块用于对库线处理单元分析出的相邻多个库线手动选择其中一个,所述库角标记模块对选定的库线的四角进行标记,所述库角平面坐标提取模块依据标记的四角结合坐标系标定坐标,所述库角坐标距离测算模块用于计算四角结合坐标系标定坐标四角坐标与坐标系原点的距离,所述安全区域建立模块用于在现有库线基础上等距离扩展建立预留的安全区域。
21、优选的,所述车辆控制系统:包括车体姿态校正模块、倒库轨迹修正模块、驱动控制单元和娱乐屏显示模块,所述车体姿态校正模块用于定位车身初始以及泊车过程中的姿态并确定矫正参数,所述倒库轨迹修正模块用于计算车体入库轨迹参数,并结合实施矫正参数实施修正入库轨迹参数,所述驱动控制单元驱动车体进行泊车操作,所述娱乐屏显示模块用于显示泊车全过程中库线位置、车体模拟姿态以及入库轨迹。
22、优选的,所述驱动控制单元:包括雷达信号融合处理模块、油门信号驱动模块、刹车信号驱动模块和方向盘角度信号控制模块,所述雷达信号融合处理模块用于融合多组雷达检测信号确定障碍物,所述油门信号驱动模块、刹车信号驱动模块和方向盘角度信号控制模块分别用于输出油门、刹车和方向盘的驱动信号。
23、优选的,所述雷达信号融合处理模块识别的障碍物在安全区域内则进行预警并停止泊车,由人工判断障碍物是否影响泊车。
24、本发明还公开了一种车辆自动泊车辅助控制装置,包括搭载车辆自动泊车辅助控制系统的硬件设备,以及均布安装于车体四周的摄像头组。
25、优选的,所述硬件设备包括设备外壳及其内搭载的soc芯片、emmc存储器、ddr3内存条、mcu处理器、lvds芯片、can芯片。
26、本发明提供了一种车辆自动泊车辅助控制系统及装置。与现有技术相比具备以下有益效果:
27、1、该车辆自动泊车辅助控制系统及装置,通过建立三维坐标系,利用对比计算的方式,可识别出库线是否处于坡面,以及对坡面的坡度进行计算,进而可更有针对性的改变泊车时的动力等参数,保证顺利的上坡停车,还可通过设定减速点,使车辆在到达指定位置时开始减速,逐步的减速可避免急刹停车,有效提高了自动泊车的舒适度,同时将所有的尺寸参数集合到坐标轴上,而不是直接定位在库线上,更方便车体准确的泊车。
28、2、该车辆自动泊车辅助控制系统及装置,通过采用库线特征提取的方式,识别画面内的所有疑似特征,并按照规律进行分析整合,即使库线有被遮挡,或长久使用后掉色导致的不清晰和中断,依旧能够识别并模拟创建出来,提高了自动泊车系统对于恶劣停车环境的适应性。
29、3、该车辆自动泊车辅助控制系统及装置,通过系统内搭建的坐标系,可快速定位库线四角的坐标,进而方便准确的进行参数计算,即便于规划车体入库的轨迹线路,同时利用确定的四角左边向外扩展出安全区域,对圈定的安全区域内进行进一步检测障碍物,可更好的判断车辆是否可安全泊车,具体的安全区域由实际的库线决定,可避免旁边车辆不规范停车造成的影响。
30、4、该车辆自动泊车辅助控制系统及装置,基于全志t7平台,采用4个模拟高清摄像采集影像视频信号,采集8个超声波雷达的信号,输入给自动泊车辅助系统,硬件上的控制器系统由soc、emmc、ddr3、mcu、lvds芯片、can芯片等组成,实现视频图像处理、畸变矫正、图像拼接处理、视频流解析处理、雷达数据融合处理、油门信号驱动,刹车信号驱动、方向盘角度信号控制、控制驱屏处理、can信号处理、输出全景视频图像、输出油门刹车控制信号、输出方向盘转动角度信号的全自动控制。视频图像由娱乐系统进行显示,用户通过操作娱乐屏/或车身按键(档位信息)与全景系统实现交互,控制器系统通过全景视频与雷达数据,控制车辆发动机与刹车以及方向盘信号进行自动泊车。可实现2d/3d全景图像显示、单摄像头图像显示、静动态辅助线功能、超声波雷达检测信号图像融合、支持图像画质调节、自动标定。由触发娱乐屏主机切换视频源呈现2d/3d高清环视图像。车辆自动泊车控制,实现垂直泊车、水平泊车、斜向泊车、泊车障碍物检测,驾驶员接管控制,由方向盘按钮和娱乐屏主机控制。
- 还没有人留言评论。精彩留言会获得点赞!