一种基于深度学习和粒子滤波的台风轨迹预测方法
本发明涉及智能台风轨迹预测,特别是涉及一种基于深度学习和粒子滤波的台风轨迹预测方法。
背景技术:
1、台风是发生在西太平洋及其邻近海域的热带气旋,是常见的极端气候现象,威胁人类生命安全和生产生活,台风轨迹预测是台风研究的典型问题。台风的形成受到气象环境、气旋热力学和动力学等多种因素的影响。传统方法上,台风轨迹预测方法主要是数值预报模型和统计预报模型。数值模型计算需求较高,以模拟复杂的台风内部结构。随着计算机技术的进步,数值模型得到进一步发展,但仍然存在计算复杂度较高、预测精度较低的问题。统计模型主要基于历史记录特征进行预测,随着海洋观测站、地面站和气象卫星系统的完善,统计模型的可用数据量倍增,从而导致了统计模型在海量历史数据中筛选可用历史特征时的大数据问题。近年来,人工智能技术蓬勃兴起,深度学习算法逐渐被应用于图像处理、目标检测等领域,特别是处理复杂的数据和非线性关系方面表现出显著优势。一方面深度学习的高效特征提取能力可以在海量数据集中提取隐藏特征,提高泛化能力,比如利用cnn进行空间信息提取。另一方面,深度学习在处理连续长时数据集时更有优势,比如gru可以提取时间序列中的时间信息。
2、近年来,深度学习算法被应用于图像处理、自然语言处理和目标检测等领域,特别是对于台风这种影响因素复杂、数据丰富的气象领域,深度学习算法可以从大量变量的数据集中提取隐藏特征,从而建立由海洋环境要素与台风轨迹之间的有效映射。现有的基于深度学习的台风轨迹预测方法主要利用网络的强特征提取能力提取时间信息和空间信息。时间信息以台风历史轨迹为主,包括历史时刻全海域节点与前一历史时刻节点间相关海洋要素的变化,相关海洋要素包括气压、位势与风速等,其反映了台风运动期间的历史规律;空间信息主要考虑全海域节点之间的关联性,其体现了某一海域中固定时刻的总体特征。
3、台风历史位置这一信息在台风预测研究中有举足轻重的地位,可以进一步收敛台风的预测范围,极大提高台风轨迹预测精度,具有重要的理论价值。但在实际海况中,台风时变性强,获得某一时刻台风位置往往经过复杂的观察和计算,不能够实时获得,进而无法对真实路径非实时可得条件下台风路径进行预测。
技术实现思路
1、有鉴于此,本发明提供了一种基于深度学习和粒子滤波的台风轨迹预测方法,以解决真实路径非实时可得条件下台风路径的预测问题。
2、为此,本发明提供了以下技术方案:
3、本发明公开了一种基于深度学习和粒子滤波的台风轨迹预测方法,包括:
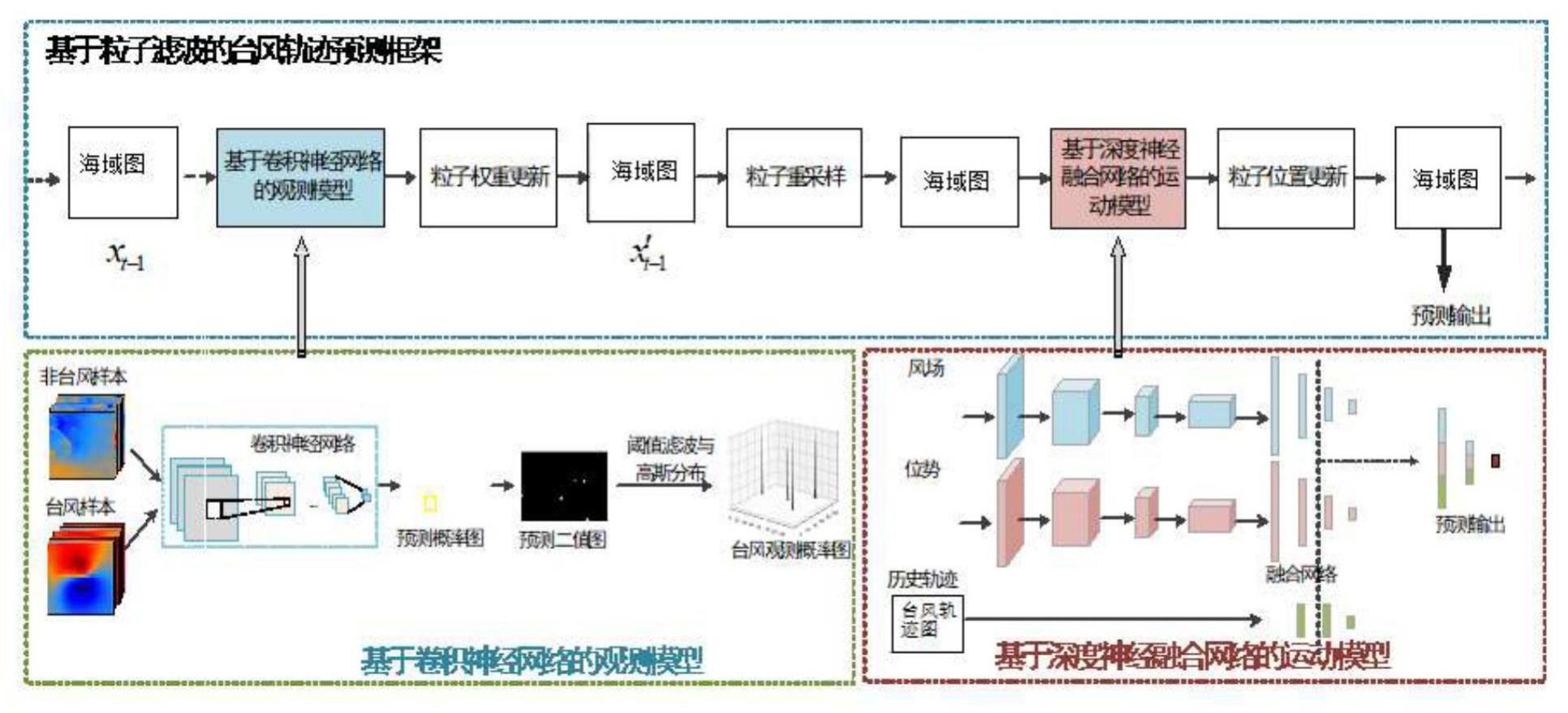
4、构建基于深度学习和粒子滤波的台风轨迹预测模型,所述台风轨迹预测模型以贝叶斯架构为基础,分为台风观测与台风更新;
5、所述台风观测部分,借助深度学习并考虑台风特征获得台风概率图,所述概率图在所述台风轨迹预测模型中修正和约束预测台风范围;
6、所述台风更新部分,利用多模态神经网络结合历史环境要素进行台风位置预测,所述预测过程同时包括粒子预测,新得到的粒子权重通过台风观测获得的概率图得到更新,对粒子加权平均得到下一时刻台风位置的后验估计,并将此作为下次预测的输入;
7、所述台风观测和所述台风更新不断循环,获得关于台风眼位置的后验估计,得到台风轨迹预测结果。
8、进一步地,借助深度学习并考虑台风特征获得台风概率图,包括:
9、构建基于卷积神经网络的观测模型;所述观测模型包括:四个卷积神经网络层conv2d,用于从输入的台风图像中提取特征;其中,第一层接受的输入张量包含9个通道,分别代表三个气压下的位势和风速特征;在每个卷积层之后,都使用relu激活函数进行非线性转换,并使用最大池化maxpool2d进行下采样;随后定义了一个softmax激活函数,用于将神经网络的输出转化为对每个类别的概率估计;除前四个卷积层外,第五个卷积层使用1*1的卷积核大小,用于减少特征图的通道数,第六个卷积层使用同样大小的卷积核,用于将特征图转化为每个类别的输出概率;在最后两个卷积层中,分别将128个通道的输入转化为32个通道和2个通道的输出;在前向传播函数中,实现卷积层的前向传递计算;其中,输入张量在每个卷积层中被转换成特征图,并在最后一层之后被展平为一个一维向量;最终,将该向量输入到sigmoid激活函数中,用于将输出值压缩到0到1的范围内,以表示对每个类别的概率估计;
10、利用所述观测模型获得当前时刻全局节点台风发生的概率。
11、进一步地,利用所述观测模型获得当前时刻全局节点台风发生的概率,包括:
12、基于台风三维立体特性和气象学原理采集气象样本,形成台风轨迹数据集;
13、从台风轨迹数据集裁剪区域样本;
14、判断该区域是否被台风范围覆盖,如果否,则将该样本确定为台风负样本;如果是,则将该样本确定为台风正样本;
15、将样本形成台风正负样本数据集;
16、将所述台风正负样本数据集输入至卷积神经网络,基于卷积神经网络获得台风特征图;
17、分类器扫描当前时刻全海域得到二值图;
18、构建高斯分布;
19、基于阈值滤波与高斯分布得到全局海域台风发生概率图。
20、进一步地,利用多模态神经网络结合历史环境要素进行台风位置预测,包括:
21、构建基于深度神经融合网络的运动模型;所述深度神经融合网络包括风场子网络、位势子网络和历史轨迹子网络,分别单独提取风场、位势和历史轨迹;所述深度神经融合网络还包括融合子网络;所述融合子网络用于将风场子网络、位势子网络和历史轨迹子网络的输出合并为一个向量,通过两个全连接层输出最终的结果;
22、利用所述运动模型预测台风下一时刻的位移。
23、进一步地,所述风场子网络对输入的台风数据进行特征提取,所述风场子网络包括3个卷积层和3个全连接层,其中每个卷积层后面包括归一化和relu激活函数,输出一个大小为2的向量,即台风眼下一时刻的位移;
24、所述位势子网络对输入的台风数据进行特征提取,所述位势子网络包括3个卷积层和3个全连接层,其中每个卷积层后面包括归一化和relu激活函数,输出一个大小为2的向量,即台风眼下一时刻的位移;
25、所述历史轨迹子网络包括全连接神经网络,输出为台风眼下一时刻的位移。
26、进一步地,训练所述深度神经融合网络,包括:
27、将三个独立的网络进行预训练;
28、将三个训练好的网络在最后一层进行拼接融合并继续训练进行参数的微调;
29、对融合子网络进行训练。
30、进一步地,所述粒子预测,包括:
31、在已知当前台风位置以二维高斯分布设置粒子;
32、通过多模态融合网络预测下一时刻位移,并根据位移量更新粒子位置;
33、依据概率图更新粒子权重,对粒子加权平均得到下一时刻台风位置的后验估计,并将此作为下次预测的输入,每隔预设次进行粒子重采样。
34、进一步地,依据概率图更新粒子权重,包括:
35、基于概率图计算每个粒子位置对应的概率数值,计算所有粒子的权值,对所有粒子的权值做归一化处理后获得各个粒子新的权值,从而获得当前时刻的粒子集合。
36、进一步地,所述粒子重采样,包括:
37、采用轮盘赌法的重采样策略,消除粒子贫化问题,得到当前时刻最终的后验分布粒子集合。
38、进一步地,获得关于台风眼位置的后验估计,包括:
39、对于有单个台风眼的情况,后验分布粒子集合的加权质心就是当前时刻台风眼的位置;对于多台风眼,确定台风眼的数量,然后对后验分布粒子集合进行聚类,每个类的加权质心就是风眼位置。
40、本发明的优点和积极效果:区别于其他利用台风位置信息进行预测的方法,本发明提出基于深度学习和粒子滤波的台风轨迹预测框架,该框架以贝叶斯架构为基础,分为台风观测与台风更新两部分。在台风历史轨迹不可知的情况下,台风观测部分借助深度学习并考虑台风特征获得台风概率图,该概率图在整体框架中修正和约束预测台风范围,提高预测精度;在台风更新部分,利用多模态神经网络结合历史环境要素进行台风位置预测,该环境要素不含任何位置信息。该预测过程同时包括粒子的预测,新得到的粒子权重通过台风观测获得的概率图得到更新,对粒子加权平均得到下一时刻台风位置的后验估计,并将此作为下次预测的输入,观测、更新不断循环,解决了真实路径非实时可得条件下台风路径的预测问题。
- 还没有人留言评论。精彩留言会获得点赞!