一种基于反光道钉的夜间高速公路车道线检测方法
本发明涉及夜间环境下高速路车道线检测,具体涉及一种基于反光道钉的夜间高速公路车道线检测方法。
背景技术:
1、车道线检测是智能道路运输安全系统的关键组成部分,同时也是无人驾驶技术能够安全可靠运行的主要保障之一,夜间高速路的车道线检测和偏离预警更是驾驶辅助的核心技术。考虑到白天光照充足,车道线和周围环境存在较大对比度,可以很好地利用图像处理技术提取清晰的车道线。但是,在夜间环境光照不足或者复杂光照条件情况下,车道线与周围环境在图像特征上对比度不足,很难得到较好的车道线检测效果。
2、目前,国内外研究人员对夜间环境的车道线检测和识别方法集中在提出各种光照补偿方法以增强夜间图像的对比度。该类补偿方法在一定程度上解决不了图像亮度低、车道线特征不明显的问题,且使得车道线检测识别方法变得复杂而降低偏离预警的实时性。因而,需要设计一种更为准确、高效的夜间车道线检测偏离预警方法,适用于各种复杂背景,辅助各类驾驶人群平安出行,降低事故发生概率,创造更加安全的公共交通环境。
3、针对该领域的研究现状,对夜间高速路的车道线检测需要进行深入的分析与思考。考虑到近年来出现高速路车道线上安装反光道钉以提高驾驶员的驾驶安全性,反光道钉在自车头灯照射下反射光亮度很高,完全可以作车道线的一个显著特征加以利用。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种基于反光道钉的夜间高速公路车道线检测方法,在高质量的夜间前方图像采集系统、车道线检测的感兴趣区域设置、自适应阈值进行图像分割、提取到反光道钉目标像素点的前提下,对感兴趣区域中反光道钉像素点采用形态学运算进行膨胀处理,并在此基础上,根据反光道钉亮块的位置划分左右车道线拟合区域、分别在左右车道线拟合区域内采用霍夫变换进行直线拟合,提取左右车道线、设定左右车道线斜率安全阈值,若车道线斜率不在安全阈值范围内则发出车道线偏离报警提示,有效提高了夜间环境下车道线检测的有效性,提高驾驶安全性。
2、本发明的目的是通过以下技术方案来实现的:
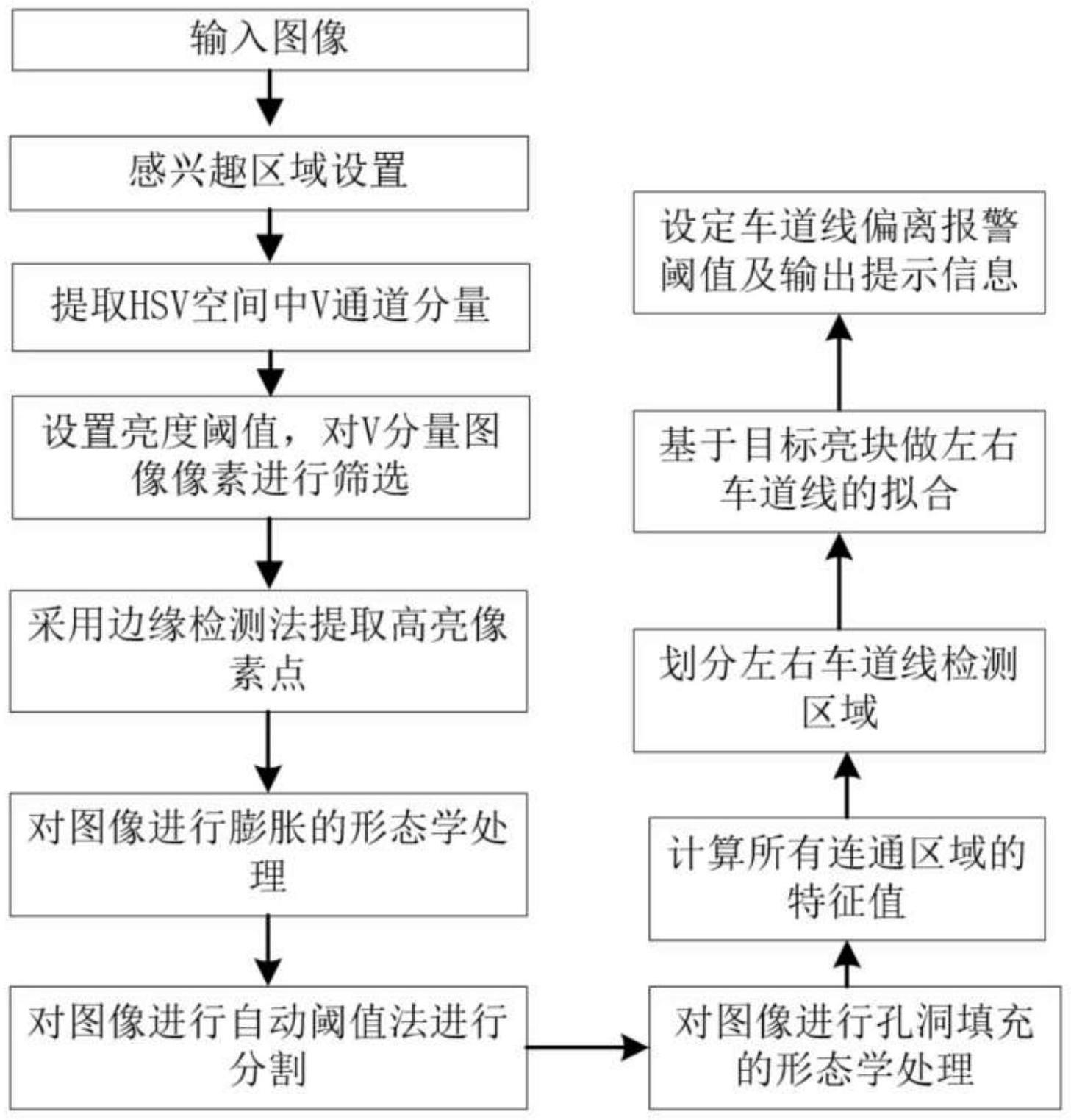
3、一种基于反光道钉的夜间高速公路车道线检测方法,包括以下步骤:
4、s1.构建高质量的夜间前方图像采集系统,获得待检测图像;
5、s2.设置包含左右车道线区域的待检测图像感兴趣区域;
6、s3.对待检测图像采用自适应阈值法进行分割处理,提取反光道钉目标像素点;
7、s4.对感兴趣区域中反光道钉像素点采用形态学运算进行膨胀处理;
8、s5.根据反光道钉亮块的位置划分左右车道线拟合区域;
9、s6.分别在左右车道线区域中采用霍夫变换进行直线拟合,进而得到左右车道线;
10、s7.分别提取左右车道线斜率,设定左右车道线斜率的安全阈值,若车道线斜率不在安全阈值范围内则发出车道线偏离报警提示。
11、本发明进一步的改进在于,步骤s1的具体实现方法如下:
12、考虑到图像质量和检测系统的稳定性,选用工业相机作为系统的图像采集模块;采用吸盘固定在前挡风玻璃,摄像头外壳设置为可调整上下俯仰角和左右偏向角;摄像头的镜头选用可变焦镜头,能够调整拍摄图像的亮度和颜色的饱和度。
13、本发明进一步的改进在于,步骤s2的具体实现方法如下:
14、选择任意一张包含左右车道线的图像作为样本图,选取图像的包含左右车道线所在区域作为模板;对车道线区域所在矩形框的四个顶点的位置坐标进行标记,根据标定位置作缩放得到车道线的检测感兴趣区域。
15、本发明进一步的改进在于,步骤s3的具体实现方法如下:
16、s301.获取若干张包含反光道钉和车道线的图像,原图像为rgb图,由红r、绿g、蓝b三基色组成,将原rgb图像转换为hsv颜色模式,转换过程表示如下:
17、r′=r/255 (1)
18、g′=g/255 (2)
19、b′=b/255 (3)
20、cmax=max(r′,g′,b′) (4)
21、cmin=min(r′,g′,b′) (5)
22、δ=cmax-cmin (6)
23、
24、
25、v=cmax (9)
26、s302.将s301步得到的hsv彩色图进行三通道分离处理,即得到h、s、v三个分量的灰度图,将三个分量的灰度图的直方图进行合成得到总直方图;采用限制对比度直方图均衡算法对上述得出的总直方图进行均衡化;
27、s303.采用中值滤波法进行去噪,将hsv颜色模式的图像进行三通道分离,对各个通道图像的所有像素点按矩形形状全搜索方式进行中值滤波,即将各像素点的值由其邻域的像素点通过累加取中值计算得出;
28、s304.在s301~s303的基础上,提取hsv的亮度分量v,对v做分割处理;
29、s305.在v分量中,截取大量图像中反光道钉亮块区域,统计此类区域的v分量直方图,得到反光道钉亮块的分割阈值范围为[m1,m2],其中,m1为最小阈值,m2为最大阈值;将v分量图像进行分割,采用改进的最大类间方差法,即最大类间方法差的灰度搜索范围从[0,255]缩小为[m1,m2],由此分割后得到以反光道钉亮块为目标的二值图。
30、本发明进一步的改进在于,步骤s4的具体实现方法如下:
31、s401.由s301~s305得到目标二值图中,反光道钉亮块区域经常出现中心处存在小孔的情况,对二值图做孔洞填充的形态学处理,具体为:先提取孔洞当中的一个点,然后不断地用结构元去膨胀,再和原图像的补集求交集,重复此过程,直至图形不再改变,最后再与原图求交集;
32、s402.由s301~s305得到目标二值图,对目标像素点进行连通标注,并提取每个连通区域的面积、周长、质心位置、最小外接矩形坐标等属性,将这类连通区域作为反光道钉候选目标区域。
33、本发明进一步的改进在于,步骤s5的具体实现方法如下:
34、s501.由上述s402得到反光道钉亮块的外接矩形框位置,提取其左上角点的x轴坐标进行从小到大的排序,以此标注反光道钉亮块的位置关系;
35、s502.为避免高速公路护栏上的反光贴亮块、路灯、广告牌反光亮块干扰亮块对反光道钉的最后直线拟合结果产生干扰,在直线拟合线划分出严格的左车道线拟合区域和右车道线拟合区域;通过对数据集的分析以及大量的实验,绝大部分反光道钉会落在一个三角形区域内,将三角形顶点和底边中点相连,这时将大三角形划分为左右两个小三角形,这两个小三角即为左右车道线检测区域。
36、本发明进一步的改进在于,步骤s6的具体实现方法如下:
37、s601.首先对图像中的一个随机边缘点进行抽取,将该边缘点标记为直线的一个点,随机抽取下一个边缘点,直到提取所有的边缘点为止;
38、s602.将随机提取的边缘点进行霍夫变换后,再进行累积和计算;选择累加器的最大的点,在高于设定阈值的情况下进入s603,否则返回s601;
39、s603.从选定的点开始沿直线位移的方向找出直线的两个端点;计算线段的长度,在大于设定阈值的情况下将该线段判定为车道线,从对边缘点霍夫变化后累加和计算开始进行循环,由此得到左右车道线。
40、本发明进一步的改进在于,步骤s7的具体实现方法如下:
41、s701.设定左侧车道线直线的斜率安全阈值为-0.43,实时检测的左侧车道线斜率大于该阈值时发出左侧车导线偏离报警;
42、s702.设定右侧车道线直线的斜率安全阈值为0.8,实时检测的右侧车道线斜率大于该阈值时发出右侧车导线偏离报警;
43、由此实现了基于反光道钉的夜间高速公路车道线检测功能。
44、本发明至少具有如下有益的技术效果:
45、本发明提出了一种使用反光道钉作为夜间环境车道线特征的方法实现车道线检测方法。反光道钉作为检测夜间高速路上车道线的目标特征,具有亮度高、与背景环境区别度显著、形状规则、分布均匀的特性,能够满足夜间环境下基于反光道钉的车道线检测需求。
46、进一步,搭建了在高质量的夜间前方图像采集系统,对待识别图像进行了图像增强的预处理,提高了图像的质量,设置车道线检测的感兴趣区域,有效减小干扰亮块,提高检测方法的精度和速度,采用自适应阈值进行图像分割和形态学处理方法提取反光道钉亮块,在此基础上,根据大量实验统计反光道钉亮块的分布位置划分左右车道线拟合区域,分别在左右车道线拟合区域内采用霍夫变换进行直线拟合出左右车道线,最后设定左右车道线斜率安全阈值,若车道线斜率不在安全阈值范围内则发出车道线偏离报警提示,有效解决了夜间环境下车道线因光照不足漏检和误检问题,提高了夜间车道线检测及偏离报警的精度,有很好的工程应用价值。
- 还没有人留言评论。精彩留言会获得点赞!