一种基于点云数据的现浇结构模板逆向建模方法与流程
本发明涉及点云逆向建模领域,尤其涉及一种基于点云数据的现浇结构模板逆向建模方法。
背景技术:
1、现浇钢筋混凝土结构在土木建筑中一直保持着较大占比,随着商品混凝土的快速发展和泵送施工技术的进步,为大型建筑中高要求、高标准的现浇结构模板的施工提供了可能。模板工程作为一种临时性、辅助性结构,决定了建筑物构件的表面平整度和尺寸,在现浇结构施工质量把控中发挥着至关重要的作用。
2、为了实现现浇结构模板工程的自动化验收和数字化存档,提高现浇结构模板的结构精度和形变检测,现有技术通常使用三维激光点云技术获取模板表面的点云信息,进而提取构件特征,逆向建模得到模板的三维模型。然而,由于施工现场杂物较多,采集的点云数据中噪点多,人工处理与划分点云数据工作量大,容易出错,处理效率低,导致验收的总时间周期长,严重制约了点云技术在现浇结构中的进一步应用。
技术实现思路
1、为了克服现有的点云技术在现浇模板的逆向建模过程中,去除杂物干扰与分割工作量大、效率低的问题,本发明提供一种基于点云数据的现浇结构模板逆向建模方法。
2、本发明提供了一种基于点云数据的现浇结构模板逆向建模方法,运用于包含多个模板的建筑,包括:
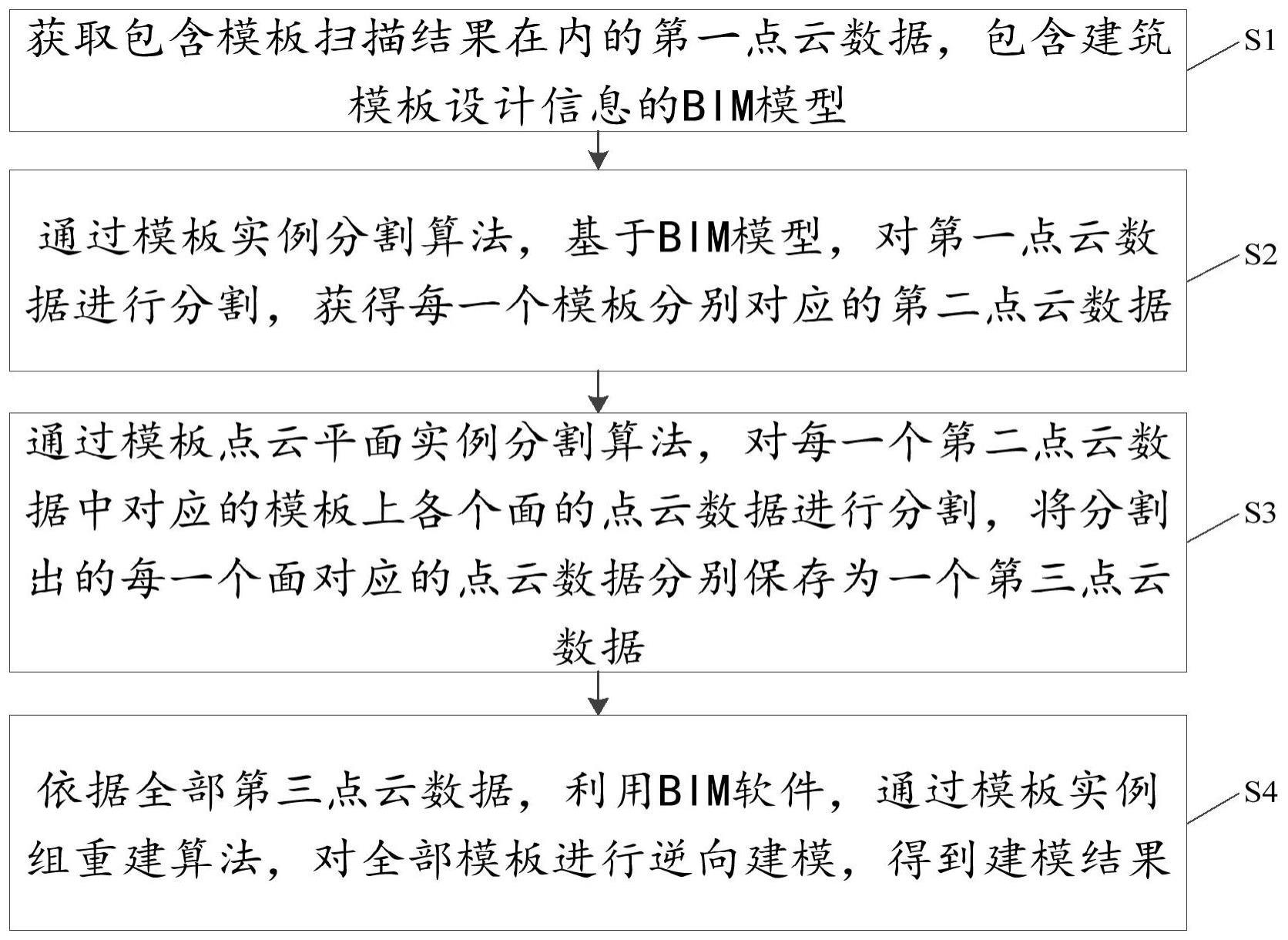
3、获取包含模板扫描结果在内的第一点云数据,以及包含建筑模板设计信息的bim模型;
4、通过模板实例分割算法,基于bim模型,对所述第一点云数据进行分割,获得每一个模板分别对应的第二点云数据;
5、通过模板点云平面实例分割算法,对每一个所述第二点云数据中对应的模板上各个面的点云数据进行分割,将分割出的每一个面对应的点云数据分别保存为一个第三点云数据;
6、依据全部所述第三点云数据,利用bim软件,通过模板实例组重建算法,对全部模板进行逆向建模,得到建模结果。
7、作为优选地,
8、所述模板实例分割算法,具体为:
9、在所述第一点云数据中,人工选取表面杂物少且形状无重复的单个模板对应的点云数据,将其保存为第四点云数据;
10、通过随机一致性算法,对所述第四点云数据中对应所述模板的顶面点云数据进行平面拟合,得到第一平面,计算所述第一平面的法向量,作为第一法向量;
11、以所述第一法向量作为z轴的方向,对第四点云数据进行坐标变换,得到第六点云数据,将第六点云数据投影至xy平面,得到第一图像;
12、利用bim软件,将所述bim模型转换为第七点云数据,对第七点云数据z轴坐标进行去中心化,获得第八点云数据;
13、将所述第八点云数据投影至xy平面生成第二图像;
14、通过基于形状的图像匹配算法,在所述第二图像中对所述第一图像进行形状匹配,得到第一图像匹配至第二图像的第一坐标变换矩阵;
15、将第一坐标变换矩阵拓展至三维,得到第二坐标变换矩阵;
16、依据第二坐标变换矩阵,对第六点云数据进行坐标变换,得到第九点云数据,对第九点云数据的z轴进行去中心化处理,得到第十点云数据;
17、通过icp算法,将第十点云数据对齐至第八点云数据,获得第十一点云数据;
18、计算所述第四点云数据相对于所述第十一点云数据的第五坐标变换矩阵,对第一点云数据依据第五坐标变换矩阵进行坐标变换,得到第五点云数据;
19、依据bim模型,建立所述第八点云数据中每个模板的轴向包围框,并对轴向包围框按照第一预设值进行等比例放大,通过放大后的轴向包围框对第五点云数据进行分割,获得每一个模板分别对应的第二点云数据。优选地,所述模板点云平面实例分割算法,具体为:
20、输入第二点云数据;
21、通过ransac算法,计算所述第二点云数据中模板的顶面法向量,并将其作为三维坐标系的z轴的方向,对所述第二点云数据进行坐标变换,得到第十二点云数据,并记录坐标变换的矩阵为第三坐标变换矩阵;
22、以第二预设值对z轴进行区间划分,统计所述第十二点云数据在z轴不同区间内的点云数量,根据区间点数峰值判断顶面所在的z轴区间,将该z轴区间之上的点云数据标记为杂物,并从所述第十二点云数据中去除,得到第十三点云数据;
23、根据邻域点计算所述第十三点云数据中每个点的主方向向量,将所述第十三点云数据中主方向向量的与z轴夹角大于第三阈值的点云数据划分为第一垂直点云数据,所述第十三点云数据的其余点云数据划分为第一水平点云数据;
24、通过ransac算法对第一垂直点云数据进行若干次平面拟合,计算每个拟合平面对应的平面法向量,并计算任意两个不同的平面法向量的位置关系,直至得到一对满足垂直条件的平面法向量,分别以相互垂直的一对平面法向量作为三维坐标系中x轴和y轴的方向,z轴方向不变,对所述第一垂直点云数据进行坐标变换,得到第二垂直点云数据,并记录坐标变换的矩阵为第四坐标变换矩阵;
25、通过基于m估计的ransac算法,在第一水平点云数据中拟合出每个对应单个水平方向平面的水平平面点云数据,以及在第二垂直点云数据中拟合出每个对应单个垂直方向平面的垂直平面点云数据;
26、依据bi m模型中该模板若干个侧面之间的几何关系,采用贪心策从所有模板平面中略筛选出符合几何关系的模板平面;
27、根据模板平面法向量方向将模板平面分为x轴朝向、y轴朝向或z轴朝向的三类平面,分别统计每类平面沿该类平面法向量方向的点云分布,获得单个平面在单个模板中的位置;
28、依据第三坐标变换矩阵的逆矩阵将每个水平平面点云数据变换至第二点云所在坐标系,并依据第三坐标变换矩阵和第四坐标变换矩阵的逆矩阵将每个垂直平面点云数据变换至第二点云数据所在坐标系,得到若干个第三点云数据。
29、优选地,所述模板实例组重建算法,具体为
30、导入全部第三点云数据,根据第三点云数据在第一点云数据中的位置关系,求出各模板的全部顶点坐标;
31、依据每一个模板的顶点坐标,为每一个模板分别建立一个实例模型;
32、计算每一个实例模型的顶部平面中心点的坐标,依据近邻搜索算法建立最近邻搜索树;
33、通过最近邻搜索树查找顶部平面中心点的最近中心点,得到实例模型的相连关系;
34、依据全部所述第三点云数据对应的平面以及实例模型的相连关系,建立不同模板之间的连接,利用bi m软件进行逆向建模,得到建模结果。
35、优选地,所述第二点云数据,包括属于单个模板的一个顶面、若干侧面和若干底面。
36、优选地,所述第一预设值的取值范围是1.05倍至1.20倍。
37、优选地,所述第二预设值的取值范围是1cm至5cm。
38、优选地,所述第三阈值为45°。
39、优选地,第四阈值范围是90°±10°。
40、本发明的有益效果是:
41、(1)通过依据建筑的bim模型以及采集的点云数据,仅需人工划分出一块模板对应的点云区域,即可自动完成对整个点云数据的杂物去除和全部模板的各表面分解,再通过bim软件进行逆向建模,有效解决了人工处理点云数据工作量大且易出错,施工现场杂物较多导致的点云逆向建模困难的问题,极大提高了现浇结构模板点云逆向建模效率,为模板工程的自动化验收和数字化存档提供精细的三维模型。
42、(2)通过基于建筑的bim模型的模板实例分割算法,可实现单个模板点云数据的自动分割,减少了人工处理点云数据工作量,提高了点云逆向建模的自动化程度和工作效率。
- 还没有人留言评论。精彩留言会获得点赞!