目标物检测方法、设备和存储介质与流程
本申请涉及数据处理,特别是涉及一种目标物检测方法、设备和存储介质。
背景技术:
1、在一些场景中,特别是车辆驾驶场景中,为了保证车辆的行车安全,需要对道路中各障碍物或者标识信息进行检测,以便于能够基于检测的信息控制车辆安全行驶。其中,在道路中存在目标障碍物的情况下,快速检测出障碍物和障碍物的位置,能够及时提醒驾驶员驾驶或者能够给出更多的时间,基于障碍物进行有效避障。
2、因此,如何快速的检测出目标物对车辆的安全驾驶至关重要。
技术实现思路
1、本申请主要解决的技术问题是提供一种目标物检测方法、设备和存储介质,能够提高目标物检测的效率。
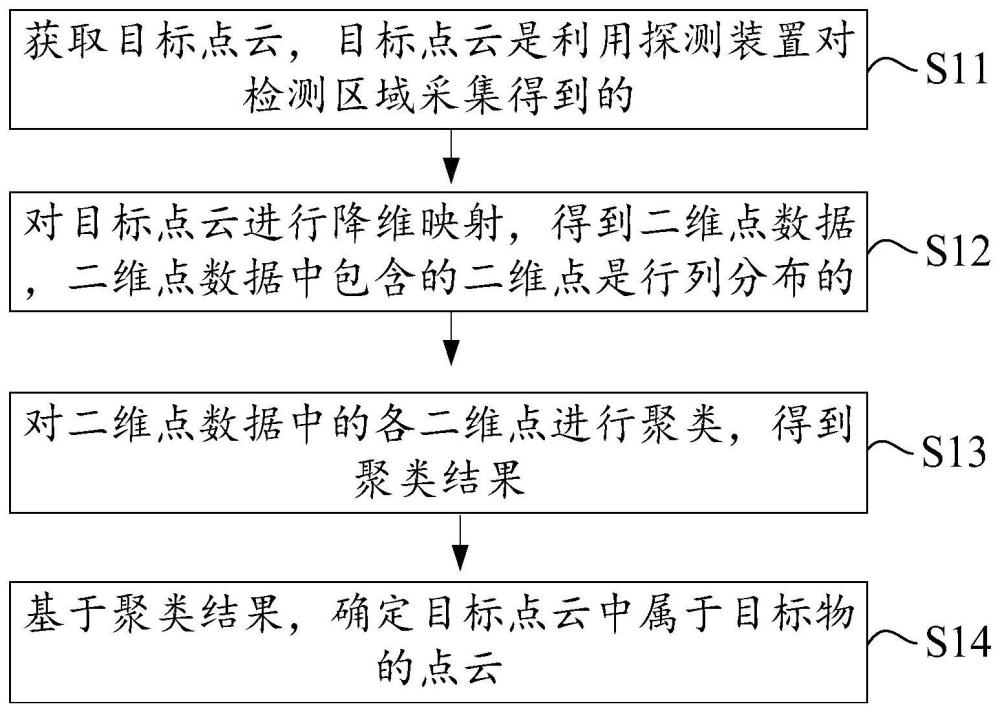
2、为解决上述技术问题,本申请采用的一个技术方案是:提供一种目标物检测方法,该方法包括:获取目标点云,目标点云是利用探测装置对检测区域采集得到的;对目标点云进行降维映射,得到二维点数据,二维点数据中包含的二维点是行列分布的;对二维点数据中的各二维点进行聚类,得到聚类结果;基于聚类结果,确定目标点云中属于目标物的点云。
3、其中,二维点数据是分别以探测装置的水平视角和垂直视角为坐标轴;和/或,二维点数据为二维图像。
4、其中,对目标点云进行降维映射,得到二维点数据,包括:对于目标点云中的各目标点,利用探测装置的第一方向的视角和第一方向的分辨率,确定目标点的映射列,并利用探测装置的第二方向的视角和第二方向的分辨率,确定目标点的映射行,第一方向和第二方向中的一者为水平方向、另一者为垂直方向,目标点的映射行和映射列的交叉点定义为二维点;对于各二维点,基于二维点对应的目标点的探测数据,得到二维点数据中二维点对应的数据值,目标点的探测数据来源于目标点云。
5、其中,在利用探测装置的第一方向的视角和第一方向的分辨率,确定目标点的映射列,并利用探测装置的第二方向的视角和第二方向的分辨率,确定目标点的映射行之前,还包括:从目标点云中获取目标点的坐标,目标点的坐标包括第一轴坐标、第二轴坐标和第三轴坐标,第三轴平行于第二方向;利用探测装置的第一方向的视角和第一方向的分辨率,确定目标点的映射列,包括:利用目标点的第一轴坐标、第二轴坐标、第一方向的视角和第一方向的分辨率,确定目标点的映射列;利用探测装置的第二方向的视角和第二方向的分辨率,确定目标点的映射列,包括:利用目标点的第三轴坐标、第二方向的视角和第二方向的分辨率,确定目标点的映射列。
6、其中,利用目标点的第一轴坐标、第二轴坐标、第一方向的视角和第一方向的分辨率,确定目标点的映射列,包括:将第一方向的最大视角减去目标点的第一轴坐标与第二轴坐标之间的比值,得到第一差值,将第一差值与第一方向的分辨率之间的第一比值或第一比值的邻近整数,确定为目标点的映射列;利用目标点的第三轴坐标、第二方向的视角和第二方向的分辨率,确定目标点的映射行,包括:将第二方向的最大视角减去目标点的第三轴坐标与目标点的第一方向距离之间的比值,得到第二差值,将第二差值与第二方向的分辨率之间的第二比值或者第二比值的邻近整数,确定为目标点的映射行。
7、其中,第一方向为水平方向,第二方向为垂直方向;和/或,基于二维点对应的目标点的探测数据,得到二维点数据中二维点对应的数据值,包括:从二维点对应的至少一个目标点中,选出满足预设距离要求的目标点,并将选出的目标点的探测数据作为二维点对应的数据值。
8、其中,聚类结果包括若干簇二维点;基于聚类结果,确定目标点云中属于目标物的点云,包括:对于各簇,从目标点云中查找出簇中的各二维点对应的目标点,作为簇对应的候选点云,各簇的候选点云分别对应一个物体;从各簇对应的候选点云中,查找出特征因子符合目标物特征的候选点云,作为目标物的点云,特征因子用于表征候选点云对应的物体的特征。
9、其中,特征因子包括候选点云对应的物体的高度、物体距离地面的高度、以及候选点云的垂直度中的至少一者;和/或,在从各簇对应的候选点云中,查找出特征因子符合目标物特征的候选点云,作为目标物的点云之前,该方法还包括以下至少一个步骤,以获得特征因子:利用候选点云确定对应物体的边界框,获取边界框的高度,作为候选点云对应的物体的高度;获取边界框的底面与地面之间的距离,得到候选点云对应的物体距离地面的高度;获取候选点云的点云协方差矩阵,对点云协方差矩阵进行特征分解,得到特征向量,基于特征向量获得候选点云的垂直度。
10、其中,目标点云是从探测装置对检测区域采集得到的原始点云中提取得到的、疑似属于目标物体的点云,目标物体包括地面,目标点云包括属于地面的地面点云;获取边界框的底面与地面之间的距离,包括:利用地面点云确定地平面参数,地面点云为原始点云中属于地面的点云;利用底面中的预设点的坐标以及地平面参数,计算得到底面与地面之间的距离。
11、其中,在利用地面点云确定地平面参数之前,该方法还包括:对地面点云进行预设方向上的分割处理,得到若干子区域分别对应的子地面点云;利用地面点云确定地平面参数,包括:对于各子区域,基于子区域中的子地面点云,确定子区域的地平面参数;利用底面中的预设点的坐标以及地平面参数,计算得到底面与地面之间的距离,包括:将预设点所属的子区域作为参考子区域,利用预设点的坐标以及参考子区域的地平面参数,计算得到底面与地面之间的距离。
12、其中,目标物为锥桶;和/或,获取目标点云,包括:获取探测装置对检测区域采集得到的原始点云;从原始点云中提取疑似属于目标物的目标点云。
13、其中,从原始点云中提取疑似属于目标物的目标点云,包括:利用语义分割模型对原始点云进行语义分割,得到若干类别点云,若干类别包括地面和目标物;从若干类别点云中选出属于目标物类别的点云,作为目标点云。
14、为解决上述技术问题,本申请采用的再一个技术方案是:提供一种电子设备,包括相互耦接的存储器和处理器,存储器存储有程序指令;处理器用于执行存储器中存储的程序指令,以实现上述方法。
15、为解决上述技术问题,本申请采用的又一个技术方案是:提供一种计算机可读存储介质,用于存储程序指令,该程序指令能够被执行以实现上述方法。
16、上述方案,在获取目标点云后,并不是直接对目标点云聚类,而是先对目标点云进行降维映射,得到行列分布的二维点数据,然后对二维点数据中的各二维点进行聚类,得到聚类结果。相比于直接对目标点云聚类的方式,本申请上述对二维点聚类的方式,可有效减少待聚类点的数量,故能够提高聚类的效率,进而提高目标物的检测效率。
技术特征:
1.一种目标物检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述二维点数据是分别以所述探测装置的水平视角和垂直视角为坐标轴;
3.根据权利要求1或2所述的方法,其特征在于,所述对所述目标点云进行降维映射,得到二维点数据,包括:
4.根据权利要求3所述的方法,其特征在于,在所述利用所述探测装置的第一方向的视角和第一方向的分辨率,确定所述目标点的映射列,并利用所述探测装置的第二方向的视角和第二方向的分辨率,确定所述目标点的映射行之前,还包括:
5.根据权利要求4所述的方法,其特征在于,所述利用所述目标点的第一轴坐标、第二轴坐标、所述第一方向的视角和所述第一方向的分辨率,确定所述目标点的映射列,包括:
6.根据权利要求3所述的方法,其特征在于,所述第一方向为水平方向,所述第二方向为垂直方向;
7.根据权利要求1所述的方法,其特征在于,所述聚类结果包括若干簇所述二维点;所述基于所述聚类结果,确定所述目标点云中属于所述目标物的点云,包括:
8.根据权利要求7所述的方法,其特征在于,所述特征因子包括所述候选点云对应的物体的高度、所述物体距离地面的高度、以及所述候选点云的垂直度中的至少一者;
9.根据权利要求8所述的方法,其特征在于,所述目标点云是从所述探测装置对检测区域采集得到的原始点云中提取得到的、疑似属于目标物体的点云,所述目标物体包括地面,所述目标点云包括属于地面的地面点云;
10.根据权利要求9所述的方法,其特征在于,在所述利用地面点云确定地平面参数之前,还包括:
11.根据权利要求1所述的方法,其特征在于,所述目标物为锥桶;
12.根据权利要求11所述的方法,其特征在于,所述从所述原始点云中提取疑似属于所述目标物的目标点云,包括:
13.一种电子设备,其特征在于,包括相互耦接的存储器和处理器,
14.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有能够被处理器运行的程序指令,所述程序指令能够被处理器执行以实现权利要求1-12任一项所述的方法。
技术总结
本申请公开了一种目标物检测方法、设备和存储介质,该方法包括:获取目标点云,目标点云是利用探测装置对检测区域采集得到的;对目标点云进行降维映射,得到二维点数据,二维点数据中包含的二维点是行列分布的;对二维点数据中的各二维点进行聚类,得到聚类结果;基于聚类结果,确定目标点云中属于目标物的点云。通过上述方式,本申请能够提高目标物的检测效率。
技术研发人员:华智,曾圣尧,胡来丰
受保护的技术使用者:浙江零跑科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!