一种基于周围光的图像自动调整方法与流程
本发明涉及图像调节处理,更具体地说,涉及一种基于周围光的图像自动调整方法。
背景技术:
1、基于周围光的图像自动调整方法是一种图像处理技术,它利用图像中周围的光照信息来自动调整图像的亮度、对比度和颜色参数,以达到更好的视觉效果和显示质量。这种方法通常用于改善在不同环境条件下拍摄的照片或图像。
2、目前的图像自动调整多是根据光传感器采集当下的环境光信息,并根据光照估计和环境光信息,对整个图像进行自动调整,这种方法在定点调整上很适应,但是当面对移动的图像载体设备时,位置、方向时刻改变的同时伴随着环境光信息的不断变化,若是仅利用算法和传感器不停采集计算得出图像光照信息的话,对装置的处理性能要求会提高,且设备的运行负担会加大。
技术实现思路
1、本发明的目的在于提供一种基于周围光的图像自动调整方法,以解决上述背景技术中提出的问题:目前的图像自动调整多是根据光传感器采集当下的环境光信息,并根据光照估计和环境光信息,对整个图像进行自动调整,这种方法在定点调整上很适应,但是当面对移动的图像载体设备时,位置、方向时刻改变的同时伴随着环境光信息的不断变化,若是仅利用算法和传感器不停采集计算得出图像光照信息的话,对装置的处理性能要求会提高,且设备的运行负担会加大。
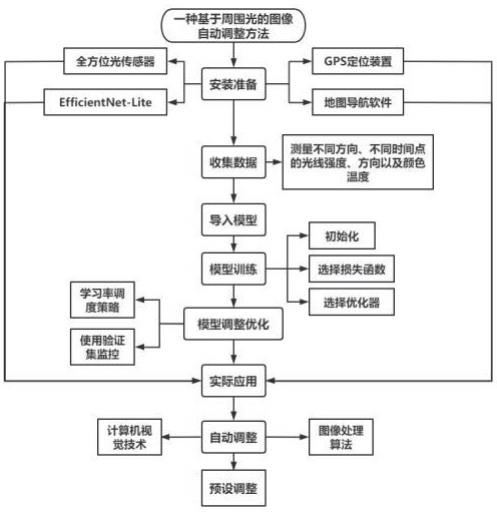
2、一种基于周围光的图像自动调整方法,包括以下步骤:
3、s1、安装准备:安装gps定位装置、地图导航软件以及全方位光传感器,且采用轻量级的efficientnet-lite深度学习模型进行图像参数的调节;
4、s2、收集数据:根据gps定位显示和全方位光传感器,测量不同方向、不同时间点的光线强度、方向以及颜色温度;
5、s3、导入模型:将这些采集到的图像数据集输入到efficientnet-lite模型中,并进行预处理;
6、s4、模型训练:在建立数据集后,对efficientnet-lite模型初始化,选择合适的损失函数,并选择合适的优化器,之后使用之前采集建立的数据集对efficientnet-lite模型进行训练;
7、s5、模型调整优化:采用学习率调度策略,并使用验证集来监控模型的性能;
8、s6、实际应用:通过gps定位,同时利用全方位光传感器实时采集周围环境的光照信息,并结合gps定位和光信息采集,利用efficientnet-lite模型计算出当下移动设备受到的环境光信息,且利用efficientnet-lite模型对剩余路段的环境光信息进行分析;
9、s7:自动调整:基于实时光照估计,利用计算机视觉技术和图像处理算法,动态调整图像的亮度、对比度、饱和度以及色彩平衡参数,同时根据efficientnet-lite模型推算预先设定接下来的图像变化参数;
10、优选地,所述s4还包括如下步骤:
11、数据预处理:收集适合任务的图像数据集,并进行预处理,以便提高模型的泛化能力;
12、网络架构选择:根据任务的复杂性和资源限制,选择适合的efficientnet-lite网络结构;
13、模型初始化:使用预训练权重对efficientnet-lite模型进行初始化;
14、损失函数选择:选择交叉熵损失函数;
15、优化器选择:选择adam作为优化器来更新模型的权重;
16、训练过程:在每个训练步骤中,从数据集中随机抽取一个小批量的样本,通过前向传播计算交叉熵损失函数,并使用反向传播更新模型的参数,采用轻量级的efficientnet-lite深度学习模型可以在资源有限的移动设备上实现快速的图像参数调节,且efficientnet-lite深度学习模型具有较少的参数和计算复杂度,以便在移动设备上高效运行,保证了实时性和计算的效率。
17、优选地,所述s5还包括如下步骤:
18、学习率调整:使用学习率衰减,在训练过程中逐渐减小学习率,以动态地调整学习率,有效帮助模型更快地收敛;
19、验证和测试:在训练过程中,将数据集划分为训练集和验证集,在每个训练周期结束时,通过efficientnet-lite模型在验证集上进行验证;
20、模型评估和优化:根据模型在测试集上的性能,进一步进行模型优化、调整和调试,并进行二次训练。
21、优选地,所述s6还包括如下步骤:
22、gps定位:使用设备上的gps功能获取当前设备的地理位置信息;
23、光信息采集:利用设备上的全方位光传感器,实时采集周围环境的光照强度、颜色和方向;
24、数据对齐:将采集到的环境光信息数据与gps定位数据进行对齐,以便将光信息与路段位置关联起来;
25、特征提取:利用efficientnet-lite模型对采集到的光信息进行处理;
26、数据标注:对环境光信息数据进行标注;
27、模型验证:使用标注的环境光信息数据,对efficientnet-lite模型进行训练,并在训练过程中,利用验证集对模型的性能进行评估;
28、模型预测:利用之前训练好的efficientnet-lite模型,根据输入的光信息以及gps定位装置中预测的日出日落规律,输出接下来时间段预测的光照强度、颜色和方向信息,从而有效帮助对环境光的变化进行分析和理解。
29、优选地,所述s7还包括如下步骤:
30、图像获取:从移动设备的图像源获取待处理的图像;
31、图像预处理:对获取到的图像进行预处理;
32、亮度调整:根据实时光照估计结果,通过线性调整的方法调整图像的亮度;
33、对比度调整:基于实时光照估计结果,调整图像的对比度,包括使用直方图均衡化和对比度拉伸来增强图像的对比度;
34、饱和度调整:根据实时光照估计结果,调整图像的饱和度,包括使用色彩空间变换或颜色增益方法来调整图像的饱和度;
35、色彩平衡调整:根据实时光照估计结果,调整图像的色彩平衡,包括使用颜色平衡算法来调整图像的色调和色彩均衡;
36、预测图像变化参数:根据接下来的方向变化和日出日落信息,推测每个时间段的光照信息,并同efficientnet-lite模型训练集中数据比较得出相近的图像变化参数;
37、图像变化:根据模型预测的图像变化参数,对输入图像进行相应的变化;
38、图像后处理:根据需要,对处理后的图像进行后处理。
39、相比于现有技术,本发明的优点在于:
40、(1)本发明中,在当下对图像调节的同时,根据gps定位装置中预测的日出日落规律分析接下来的环境光信息,并将分析得出的信息通过efficientnet-lite模型计算出图像变化参数,并提前预设接下来的参数调整,做到提前适应光环境,提高适应调整的效率。
41、(2)本发明中,通过提前训练efficientnet-lite模型,并在实际应用中结合地图导航应用提前确定移动路线,之后在移动过程中,通过gps定位获取移动设备的实时位置信息,并利用全方位光传感器实时采集周围环境的光照信息,能够很快得出位置改变前后的光环境信息参数,从而有效对比进行调整,提高适应性,减少图像识别延后情况的发生。
42、(3)本发明中,结合gps定位、全方位光传感、图像处理、计算机视觉和实时算法以及导航应用,进一步提高光环境信息采集的精细度,并结合日照节律,将不同时段采集到的信息同日照节律点一一对应,方便后期预测时进行比对,有效提高预测的准确性。
- 还没有人留言评论。精彩留言会获得点赞!