一种网联车车载视频智能监控方法及系统与流程
本发明涉及人工智能领域,特别涉及一种网联车车载视频智能监控方法及系统。
背景技术:
1、网联车车载视频是指在车辆中使用的联网视频系统。这种系统通常使用摄像头来捕捉车辆周围的实时视频,并通过网络传输将视频数据发送到其他设备或服务器进行处理。
2、随着网联车视频系统的不断完善,不少车主都可以将车辆视频进行共享,当交通事故或者是其他事故发生时,可以从车主上传的车辆视频还原事故的情形,以达到监控事故的目的,然而随着车主上传车辆视频的数量增多,现有技术中,对各种车辆视频逐一进行人工查看的效率较低,因此,如何利用信息化的技术去在这些海量的视频数据中充分地分析挖掘视频的内容、提取出有用的信息,无疑具有极高的研究和应用价值。
技术实现思路
1、本发明的主要目的为提供一种网联车车载视频智能监控方法及系统,旨在解决对各种车辆视频逐一进行人工查看的效率较低的问题。
2、本发明提供了一种网联车车载视频智能监控方法,包括:
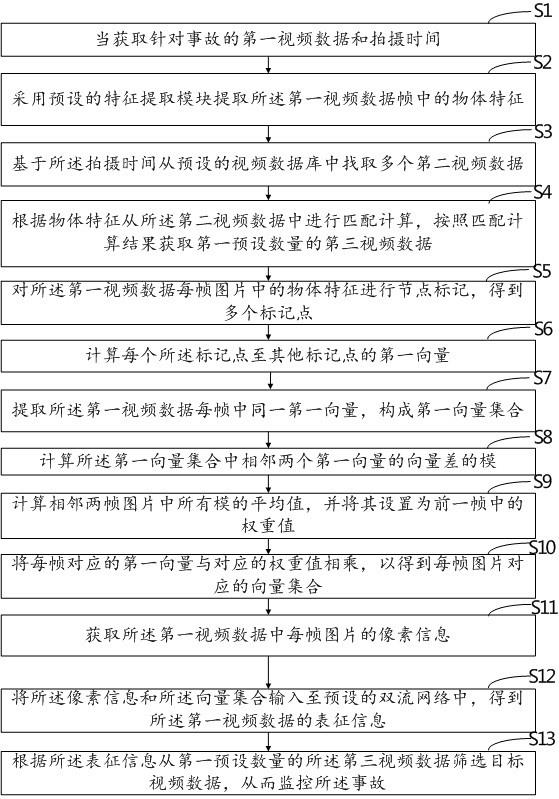
3、当事故报警指令触发时,获取针对事故的第一视频数据,并获取所述第一视频数据的拍摄时间;
4、采用预设的特征提取模块提取所述第一视频数据帧中的物体特征;
5、基于所述拍摄时间从预设的视频数据库中找取多个第二视频数据;
6、根据物体特征从所述第二视频数据中进行匹配计算,按照匹配计算结果获取第一预设数量的第三视频数据;
7、对所述第一视频数据每帧图片中的物体特征进行节点标记,得到多个标记点;
8、基于每个标记点的位置计算每个所述标记点至其他标记点的第一向量;
9、提取所述第一视频数据每帧中同一第一向量,构成第一向量集合;其中,所述第一向量集合中任意两个第一向量所对应的两个节点相同;
10、计算所述第一向量集合中相邻两个第一向量的向量差的模;
11、计算相邻两帧图片中所有模的平均值,并将其设置为前一帧中的权重值;
12、将每帧对应的第一向量与对应的权重值相乘,以得到每帧图片对应的向量集合;
13、获取所述第一视频数据中每帧图片的像素信息;
14、将所述像素信息和所述向量集合输入至预设的双流网络中,得到所述第一视频数据的表征信息;
15、根据所述表征信息从第一预设数量的所述第三视频数据筛选目标视频数据,从而监控所述事故。
16、进一步地,所述将所述像素信息和所述向量集合输入至预设的双流网络中,得到所述第一视频数据的表征信息的步骤之前,还包括:
17、获取多组训练数据,其中,一组训练数据包括训练视频数据的像素信息、向量集合以及对应的人工标识构成,所述人工标识为训练视频数据的表征信息;
18、将所述像素信息以及向量集合输入预设的双流神经网络中,采用有监督的方式进行训练,从而得到双流网络。
19、进一步地,所述根据物体特征从所述第二视频数据中进行匹配计算,按照匹配计算结果获取第一预设数量的第三视频数据的步骤,包括:
20、从每个所述第二视频数据中抽取第二预设数量的视频帧;
21、通过预设的特征提取模块提取所述视频帧中的目标特征;
22、通过预设的相似度度量算法计算所述目标特征与所述物体特征的相似度;
23、按照相似度的大小,从大至小选取第一预设数量的第三视频数据。
24、进一步地,所述对所述第一视频数据每帧图片中的物体特征进行节点标记,得到多个标记点的步骤,包括:
25、通过预设的目标检测算法对所述物体特征进行标记;
26、记录标记的位置,从而得到对应的多个标记点。
27、进一步地,所述采用预设的特征提取模块提取所述第一视频数据帧中的物体特征的步骤,包括:
28、将所述第一视频数据帧分别输入至对应的所述特征提取网络的所述输入层;
29、通过隐藏层利用激励函数对所述输入层输入的所述第一视频数据帧进行非线性化处理,得到拟合的结果;
30、通过输出层对所述拟合的结果进行输出表示,输出所述第一视频数据帧对应的物体特征。
31、本发明还提供了一种网联车车载视频智能监控系统,包括:
32、第一获取模块,用于当事故报警指令触发时,获取针对事故的第一视频数据,并获取所述第一视频数据的拍摄时间;
33、第一提取模块,用于采用预设的特征提取模块提取所述第一视频数据帧中的物体特征;
34、找取模块,用于基于所述拍摄时间从预设的视频数据库中找取多个第二视频数据;
35、第一计算模块,用于根据物体特征从所述第二视频数据中进行匹配计算,按照匹配计算结果获取第一预设数量的第三视频数据;
36、标记模块,用于对所述第一视频数据每帧图片中的物体特征进行节点标记,得到多个标记点;
37、第二计算模块,用于基于每个标记点的位置计算每个所述标记点至其他标记点的第一向量;
38、第二提取模块,用于提取所述第一视频数据每帧中同一第一向量,构成第一向量集合;其中,所述第一向量集合中任意两个第一向量所对应的两个节点相同;
39、第三计算模块,用于计算所述第一向量集合中相邻两个第一向量的向量差的模;
40、第四计算模块,用于计算相邻两帧图片中所有模的平均值,并将其设置为前一帧中的权重值;
41、第五计算模块,用于将每帧对应的第一向量与对应的权重值相乘,以得到每帧图片对应的向量集合;
42、第二获取模块,用于获取所述第一视频数据中每帧图片的像素信息;
43、输入模块,用于将所述像素信息和所述向量集合输入至预设的双流网络中,得到所述第一视频数据的表征信息;
44、筛选模块,用于根据所述表征信息从第一预设数量的所述第三视频数据筛选目标视频数据,从而监控所述事故。
45、进一步地,所述网联车车载视频智能监控系统,还包括:
46、训练数据获取模块,用于获取多组训练数据,其中,一组训练数据包括训练视频数据的像素信息、向量集合以及对应的人工标识构成,所述人工标识为训练视频数据的表征信息;
47、信息输入模块,用于将所述像素信息以及向量集合输入预设的双流神经网络中,采用有监督的方式进行训练,从而得到双流网络。
48、进一步地,所述第一计算模块,包括:
49、抽取子模块,用于从每个所述第二视频数据中抽取第二预设数量的视频帧;
50、提取子模块,用于通过预设的特征提取模块提取所述视频帧中的目标特征;
51、计算子模块,用于通过预设的相似度度量算法计算所述目标特征与所述物体特征的相似度;
52、选取子模块,用于按照相似度的大小,从大至小选取第一预设数量的第三视频数据。
53、进一步地,所述标记模块,包括:
54、标记子模块,用于通过预设的目标检测算法对所述物体特征进行标记;
55、记录子模块,用于记录标记的位置,从而得到对应的多个标记点。
56、进一步地,所述第一提取模块,包括:
57、数据帧输入子模块,用于将所述第一视频数据帧分别输入至对应的所述特征提取网络的所述输入层;
58、非线性化处理子模块,用于通过隐藏层利用激励函数对所述输入层输入的所述第一视频数据帧进行非线性化处理,得到拟合的结果;
59、输出子模块,用于通过输出层对所述拟合的结果进行输出表示,输出所述第一视频数据帧对应的物体特征。
60、本发明的有益效果:通过获取的第一视频数据,按照时间进行第一次筛选,然后根据物体特征进行第二次筛选,并通过像素以及运动信息进行三次筛选,从而可以得到目标视频数据,完成对目标视频数据的第三次筛选,提高了目标视频数据的筛选精度,可以使相关人员对事故进行监控,提高了查看视频数据的效率。
- 还没有人留言评论。精彩留言会获得点赞!