一种驱动电机振动噪音优化方法及系统与流程
本发明涉及新能源汽车,特别涉及一种驱动电机振动噪音优化方法及系统。
背景技术:
1、随着科技的进步以及生产力的快速发展,新能源汽车技术也得到了快速的发展,并且已经逐渐得到了人们的认可,已经在人们的日常生活中得到普及,并且极大地方便了人们的生活。
2、其中,驱动电机是新能源电动汽车的核心零部件之一,用于给汽车提供动力,但是驱动电机在运行的过程中会产生一定的振动噪声,而振动噪声会直接影响车辆的驾乘舒适性,从而会对应影响用户的使用体验。
3、具体的,现有的电机振动噪声主要来源于电磁力,并且该电磁力的大小和分布情况与驱动电机的结构参数、控制策略以及工艺误差等因素有关,其中,现有技术大部分通过模态分析或者有限元分析的方式来优化驱动电机的振动噪声,然而,上述方式需要首先构建出大量的三维模型,并在构建出的三维模型的基础上进行对应的分析,导致优化的周期较长,同时会产生大量的优化数据,不利于快速的获取到优化结果,从而对应降低了优化的效率。
技术实现思路
1、基于此,本发明的目的是提供一种驱动电机振动噪音优化方法及系统,以解决现有技术的振动噪音优化周期较长,导致优化效率较低的问题。
2、本发明实施例第一方面提出了:
3、一种驱动电机振动噪音优化方法,其中,所述方法包括:
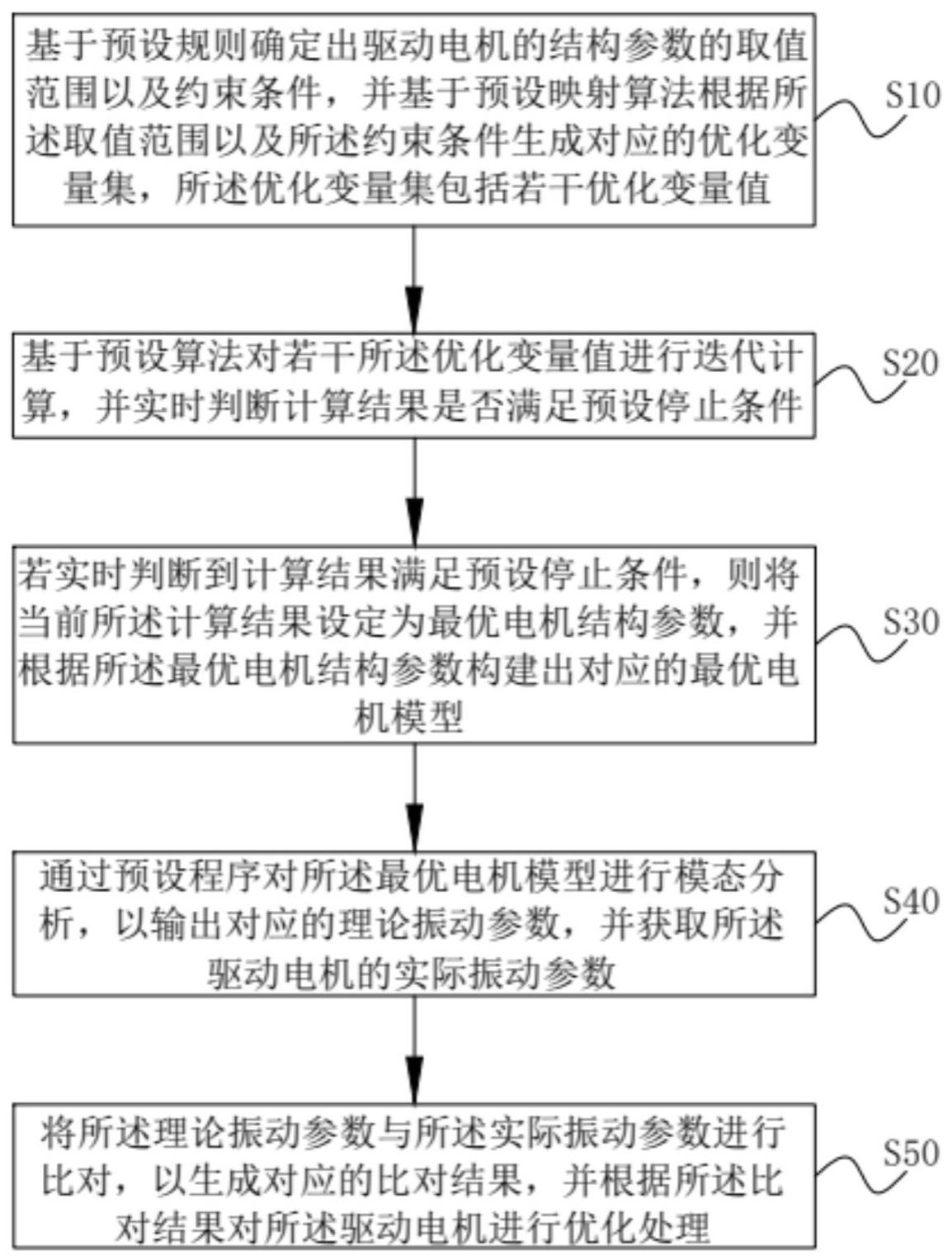
4、基于预设规则确定出驱动电机的结构参数的取值范围以及约束条件,并基于预设映射算法根据所述取值范围以及所述约束条件生成对应的优化变量集,所述优化变量集包括若干优化变量值;
5、基于预设算法对若干所述优化变量值进行迭代计算,并实时判断计算结果是否满足预设停止条件;
6、若实时判断到计算结果满足预设停止条件,则将当前所述计算结果设定为最优电机结构参数,并根据所述最优电机结构参数构建出对应的最优电机模型;
7、通过预设程序对所述最优电机模型进行模态分析,以输出对应的理论振动参数,并获取所述驱动电机的实际振动参数;
8、将所述理论振动参数与所述实际振动参数进行比对,以生成对应的比对结果,并根据所述比对结果对所述驱动电机进行优化处理。
9、本发明的有益效果是:通过实时获取驱动电机的结构参数的取值范围以及约束条件能够对应确定出当前驱动电机的型号以及整体结构,进一步的,生成的优化变量值能够对应当前驱动电机的结构参数,并对应计算出最优的结构参数,基于此,再构建出对应的最优电机模型,从而能够将当前驱动电机的实际振动参数与上述最优电机模型的理论振动参数进行比对,并能够最终根据两者的比对结果进行对应的优化处理,从而不需要构建出大量的三维模型,同时不会产生大量的数据,进而能够对应缩短优化的周期,同时提升优化的效率,也能够提升用户的使用体验。
10、进一步的,所述方法还包括:
11、若实时判断到计算结果不满足所述预设停止条件,则对若干所述优化变量值进行混沌变异或者交叉或者选择处理,以生成若干对应的二次优化变量值;
12、对若干所述二次优化变量值重新进行迭代计算,并在重新输出的计算结果满足所述预设停止条件时停止运算。
13、进一步的,所述基于预设映射算法根据所述取值范围以及所述约束条件生成对应的优化变量集的步骤包括:
14、当获取到所述取值范围以及所述约束条件时,对所述取值范围以及所述约束条件进行归一化处理,以将所述取值范围和所述约束条件存储至对应的映射区间;
15、通过所述预设映射算法根据所述映射区间映射出所述优化变量集,所述优化变量集具有唯一性。
16、进一步的,所述预设算法的表达式为:
17、
18、其中,xn表示第n次迭代后的状态变量,n表示次数。
19、进一步的,所述方法还包括:
20、逐一计算出每一所述优化变量值分别对应的径向电磁力谐波幅值,并根据预设适应度函数以及所述径向电磁力谐波幅值计算出每一所述优化变量值分别对应的适应度值;
21、基于所述适应度值对所述驱动电机进行电磁场分析,以提取出所述驱动电机的电磁力对应的时空二相性,并根据所述时空二相性以及所述理论振动参数对所述驱动电机进行隔音处理。
22、进一步的,所述根据所述时空二相性以及所述理论振动参数对所述驱动电机进行隔音处理的步骤包括:
23、提取出所述理论振动参数中包含的振动位移、振动速度、振动加速度以及辐射声功率,并基于所述时空二相性对所述振动位移、所述振动速度、所述振动加速度以及所述辐射声功率进行融合处理,以生成对应的时空分布图;
24、根据所述时空分布图检测出所述驱动电机表面的若干振动区域,并对若干所述振动区域进行隔音包裹处理。
25、进一步的,所述预设适应度函数的表达式为:
26、
27、其中,n表示谐波阶次,fri表示第i阶径向电磁力谐波幅值。
28、本发明实施例第二方面提出了:
29、一种驱动电机振动噪音优化系统,其中,所述系统包括:
30、映射模块,用于基于预设规则确定出驱动电机的结构参数的取值范围以及约束条件,并基于预设映射算法根据所述取值范围以及所述约束条件生成对应的优化变量集,所述优化变量集包括若干优化变量值;
31、判断模块,用于基于预设算法对若干所述优化变量值进行迭代计算,并实时判断计算结果是否满足预设停止条件;
32、处理模块,用于若实时判断到计算结果满足预设停止条件,则将当前所述计算结果设定为最优电机结构参数,并根据所述最优电机结构参数构建出对应的最优电机模型;
33、分析模块,用于通过预设程序对所述最优电机模型进行模态分析,以输出对应的理论振动参数,并获取所述驱动电机的实际振动参数;
34、优化模块,用于将所述理论振动参数与所述实际振动参数进行比对,以生成对应的比对结果,并根据所述比对结果对所述驱动电机进行优化处理。
35、进一步的,所述驱动电机振动噪音优化系统还包括计算模块,所述计算模块具体用于:
36、若实时判断到计算结果不满足所述预设停止条件,则对若干所述优化变量值进行混沌变异或者交叉或者选择处理,以生成若干对应的二次优化变量值;
37、对若干所述二次优化变量值重新进行迭代计算,并在重新输出的计算结果满足所述预设停止条件时停止运算。
38、进一步的,所述映射模块具体用于:
39、当获取到所述取值范围以及所述约束条件时,对所述取值范围以及所述约束条件进行归一化处理,以将所述取值范围和所述约束条件存储至对应的映射区间;
40、通过所述预设映射算法根据所述映射区间映射出所述优化变量集,所述优化变量集具有唯一性。
41、进一步的,所述预设算法的表达式为:
42、
43、其中,xn表示第n次迭代后的状态变量,n表示次数。
44、进一步的,所述驱动电机振动噪音优化系统还包括提取模块,所述提取模块具体用于:
45、逐一计算出每一所述优化变量值分别对应的径向电磁力谐波幅值,并根据预设适应度函数以及所述径向电磁力谐波幅值计算出每一所述优化变量值分别对应的适应度值;
46、基于所述适应度值对所述驱动电机进行电磁场分析,以提取出所述驱动电机的电磁力对应的时空二相性,并根据所述时空二相性以及所述理论振动参数对所述驱动电机进行隔音处理。
47、进一步的,所述提取模块还具体用于:
48、提取出所述理论振动参数中包含的振动位移、振动速度、振动加速度以及辐射声功率,并基于所述时空二相性对所述振动位移、所述振动速度、所述振动加速度以及所述辐射声功率进行融合处理,以生成对应的时空分布图;
49、根据所述时空分布图检测出所述驱动电机表面的若干振动区域,并对若干所述振动区域进行隔音包裹处理。
50、进一步的,所述预设适应度函数的表达式为:
51、
52、其中,n表示谐波阶次,fri表示第i阶径向电磁力谐波幅值。
53、本发明实施例第三方面提出了:
54、一种计算机,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述计算机程序时实现如上面所述的驱动电机振动噪音优化方法。
55、本发明实施例第四方面提出了:
56、一种可读存储介质,其上存储有计算机程序,其中,该程序被处理器执行时实现如上面所述的驱动电机振动噪音优化方法。
57、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!