一种基于光线追踪的桥梁结构日照阴影快速识别方法
本发明属于桥梁结构仿真分析的,具体涉及一种基于光线追踪的桥梁结构日照阴影快速识别方法。
背景技术:
1、在日照作用下,任何暴露在露天环境中的物体会逐渐升温,且物体向阳面的温度会显著高于背阳面,即在太阳辐射下物体内部存在非均匀温度场。针对桥梁结构而言,非均匀温度场会使其产生变形、应力等温度效应,且温度效应在桥梁结构设计荷载中占有很大比重,研究桥梁结构的非均匀温度场与温度效应主要通过有限元仿真的方式。
2、大型桥梁结构形式复杂,桥梁向阳面的部分区域可能会被自身部件或环境地形遮挡产生阴影,导致局部温度降低,进一步影响温度场的非均匀性,并且桥梁的阴影区域还与时间、桥梁方位角、桥址经纬度等多种因素相关。因此,实现桥梁结构的日照温度场精确仿真需要动态识别桥梁结构的日照阴影区域。
3、目前在桥梁结构日照温度场仿真分析中常用的阴影识别方法有两种,分别是叉积判断法与辐射矩阵法,前者通过三维空间中两向量的叉积运算实现光线碰撞检测,进而识别日照阴影区域,由于空间向量叉积涉及三个分量的乘法与减法运算,在模型单元数量较多时计算效率低,并且纯向量运算会导致算法优化难度高、灵活性差;后者是通过“半立方体”投影等效原理,近似计算多个相互辐射的平面构成的角系数矩阵实现遮挡与可见性的判断,由于采用了近似算法,导致此方法对结构复杂的桥梁阴影识别精度差。
4、光线追踪是一种能够处理三维模型空间深度信息的计算方法,是计算机图形学的核心算法之一,目前广泛应用于动画渲染、游戏与电影特效制作、建筑室内设计等邻域。光线追踪的核心是光线与场景相交的可见性查询,又被称作“光线遍历”,具有几何识别准确性高、可编程性强以及算法灵活性高等优势。但对于复杂大型桥梁,“光线遍历”的做法会占用计算机处理器做大量无效计算,同样存在计算效率低的问题。
技术实现思路
1、本发明的目的在于针对现有技术中的上述不足,提供一种基于光线追踪的桥梁结构日照阴影快速识别方法,以解决现有桥梁结构日照阴影识别方法存在计算精度差、效率低等技术难题,以及在动态识别复杂大型桥梁的日照阴影区域时不但需要耗费大量时间,而且识别结果还有可能失真的问题。
2、为达到上述目的,本发明采取的技术方案是:
3、一种基于光线追踪的桥梁结构日照阴影快速识别方法,其包括以下步骤:
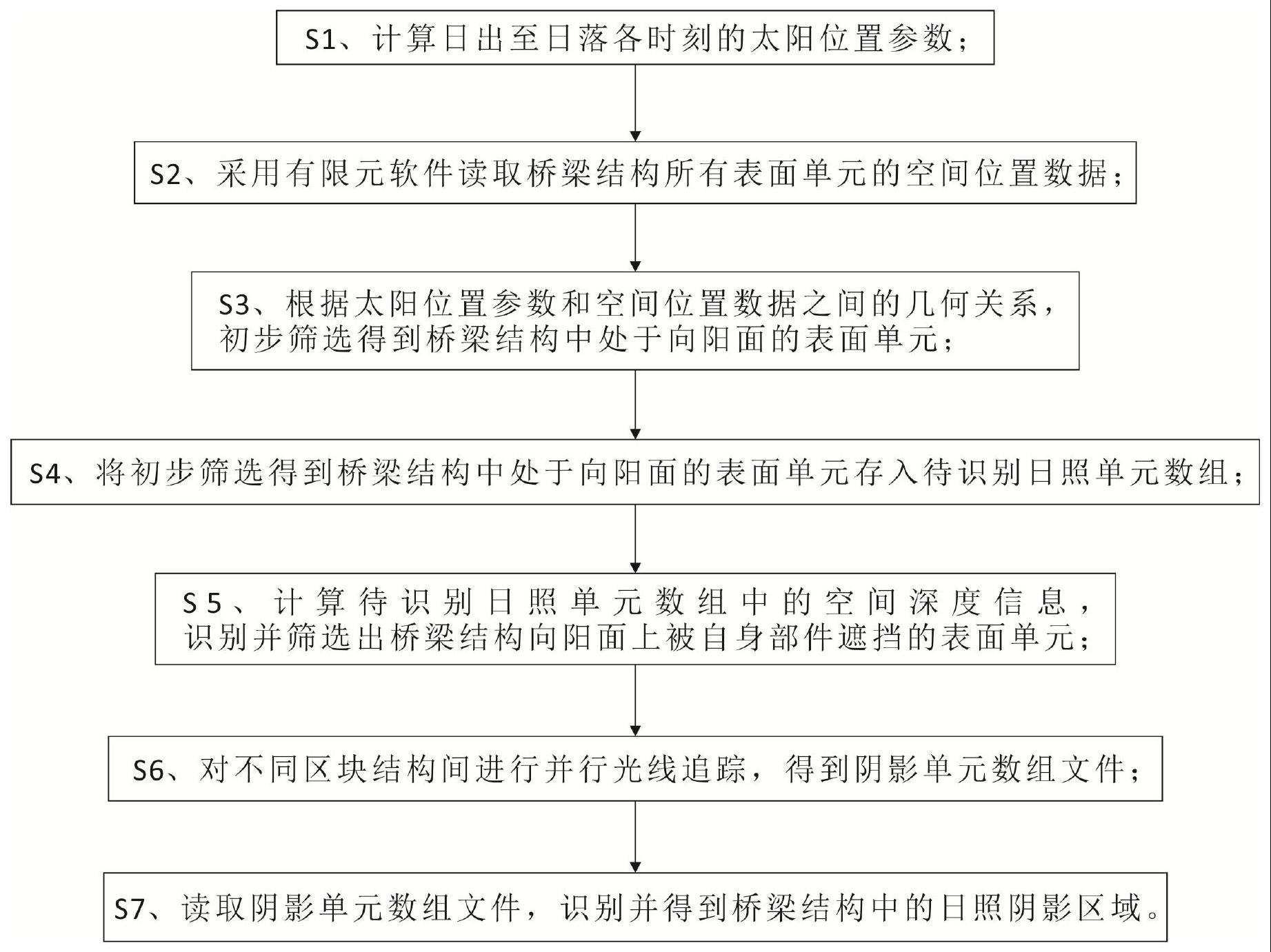
4、s1、根据地理纬度、太阳赤纬角和太阳时角,计算日出至日落各时刻的太阳位置参数;
5、s2、采用有限元软件读取桥梁结构所有表面单元的空间位置数据;
6、s3、根据所述太阳位置参数和所述桥梁结构所有表面单元的空间位置数据之间的几何关系,初步筛选得到桥梁结构中处于向阳面的表面单元;
7、s4、将初步筛选得到桥梁结构中处于向阳面的表面单元存入待识别日照单元数组;
8、s5、计算所述待识别日照单元数组中的空间深度信息,识别并筛选出桥梁结构向阳面上被自身部件遮挡的表面单元,即阴影单元;
9、s6、将桥梁结构进行空间分割得到桥梁结构的区块结构,并对不同区块结构间进行并行光线追踪,得到阴影单元数组文件;
10、s7、采用有限元软件读取所述阴影单元数组文件,根据阴影单元数组文件中的单元编号,识别并得到桥梁结构中的日照阴影区域。
11、进一步地,步骤s1中计算日出至日落各时刻的太阳位置参数,包括:
12、
13、
14、其中,hs为太阳高度角;γs为太阳方位角;为地理纬度;δ为太阳赤纬角;ω为太阳时角。
15、进一步地,步骤s2中的所述桥梁结构所有表面单元的空间位置数据,包括表面单元编号e、单元质心坐标q(x,y,z)和单元法向量
16、进一步地,步骤s3包括:
17、计算桥梁结构中所有表面单元的空间位置数据与太阳位置参数之间的几何关系:
18、
19、
20、其中,θ为表面单元的太阳光线入射角;cossx、cossy、cossz分别为太阳向量与x、y、z坐标轴夹角的余弦值;cosnx、cosny、cosnz分别为单元法向量与x、y、z坐标轴夹角的余弦值;
21、当0<cosθ<1时,则表面单元处于向阳面,该表面单元为待识别日照单元;反之,表面单元则处于背阳面,该表面单元为阴影单元。
22、进一步地,步骤s5包括:
23、s5.1、计算桥梁结构中任意单元e0的平面方程:
24、
25、其中,d(x0,y0,z0)为e0的质心坐标;x为空间平面方程未知数;
26、s5.2、以表面单元e的质心坐标q(x,y,z)为起点,向太阳方向射出一条射线追踪太阳位置,该射线方程为:
27、
28、其中,为的方向向量,δ'为常数;
29、s5.3、基于步骤s5.1和步骤s5.2,计算得到常数δ':
30、
31、若δ'≤0,则表面单元e位于单元e0前端,即表面单元e不会被单元e0遮挡;若δ'>0,则表面单元e位于单元e0后端,即表面单元e可能被单元e0遮挡;
32、s5.4、基于计算得到的常数δ',计算与单元e0的交点j与单元e0质心d之间的距离λ:
33、
34、若λ>ε,则表面单元e不被单元e0遮挡,则表面单元e为日照单元;若λ≤ε,则表面单元e被单元e0遮挡,则表面单元e为阴影单元;ε为根据表面单元大小确定单元的有效遮挡范围。
35、进一步地,步骤s6包括:
36、s6.1、采用与x-y、x-z或y-z平面平行的平面p1,p2,…,pn将桥梁结构分割成多个区块结构;
37、s6.2、在单元质心坐标q(x,y,z)数据中分别提取x、y、z坐标的最大值与最小值,以确定桥梁结构的边界;
38、s6.3、以平面p1,p2,…,pn为分界面,通过单元质心坐标q(x,y,z)判断单元所属的区块结构;
39、s6.4、对不同区块结构间进行并行光线追踪,得到阴影单元数组文件。
40、进一步地,步骤s6.4包括:
41、s6.4.1、执行步骤s5.1~步骤s5.4,识别区块结构内部单元的相互遮挡情况,若表面单元e判定为阴影单元,则将该表面单元e对应的单元编号存入阴影单元数组文件;若表面单元e判定为日照单元,则该表面单元e在所属区块结构内部不被遮挡;
42、s6.4.2、联立射线与平面p1,p2,…,pn的方程求解射线与所有分割平面的交点,通过交点判断射线经过的区块结构;
43、s6.4.3、执行步骤s5.1~步骤s5.4,判断在所属区块结构内部不被遮挡的表面单元e是否被所经过区块结构中的其它表面单元遮挡,若被遮挡,则将表面单元编号存入阴影单元数组文件。
44、本发明提供的基于光线追踪的桥梁结构日照阴影快速识别方法,具有以下
45、有益效果:
46、1、识别精度高;本发明可准确、高效的识别桥梁结构日照阴影区域,在识别复杂桥梁结构的日照阴影区域时,可根据分割区块结构设置不同的有效遮挡范围参数,实现不同单元大小区块间的日照阴影精确识别。
47、2、识别效率高;本发明通过将桥梁结构进行空间分割,大大减少了光线追踪算法中“光线遍历”的无效计算次数,避免了算力浪费,同时通过matlab软件的并行计算功能充分发挥了计算机处理器的多线程性能,针对复杂大型桥梁结构可极大提高阴影识别效率。
48、3、适用性强;本发明不仅可用于识别桥梁结构的日照阴影区域,还可用于识别复杂大型建筑结构的日照阴影区域,适用性强。
49、4、推广性强;本发明进一步拓展了光线追踪算法的应用领域,凭借识别精度与计算效率上的优势,在涉及光线传播的热辐射结构有限元仿真领域有较好的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!