一种提示方法、装置、电子设备及存储介质与流程
本技术涉及垃圾桶,尤其涉及一种提示方法、装置、电子设备及存储介质。
背景技术:
1、在垃圾分类项目中,需要识别出垃圾桶满溢的情况,及时发出满溢预警,提醒工作人员处理满溢的垃圾桶。
2、目前,常用的检测垃圾桶满溢的方法为:拍摄垃圾桶侧面的图像。当检测到图像中垃圾超过垃圾桶开口的横截面时,确定垃圾桶满溢。但是,垃圾桶侧面的图像却无法确定垃圾桶内的垃圾是否分类错误。而如果根据垃圾桶上方垂直拍摄的图像确定垃圾桶内的垃圾是否分类错误时,却无法确定垃圾桶是否满溢。
3、因此,如何同时确定垃圾桶内的垃圾是否满溢以及垃圾是否分类错误,是目前亟需解决的技术问题。
技术实现思路
1、本技术提供一种提示方法、装置、电子设备及存储介质,用于在确定垃圾桶内垃圾是否分类错误的情况下,确定出垃圾桶内的垃圾是否满溢。
2、为实现上述技术目的,本技术采用如下技术方案:
3、第一方面,本技术实施例提供了一种提示方法,该方法包括:
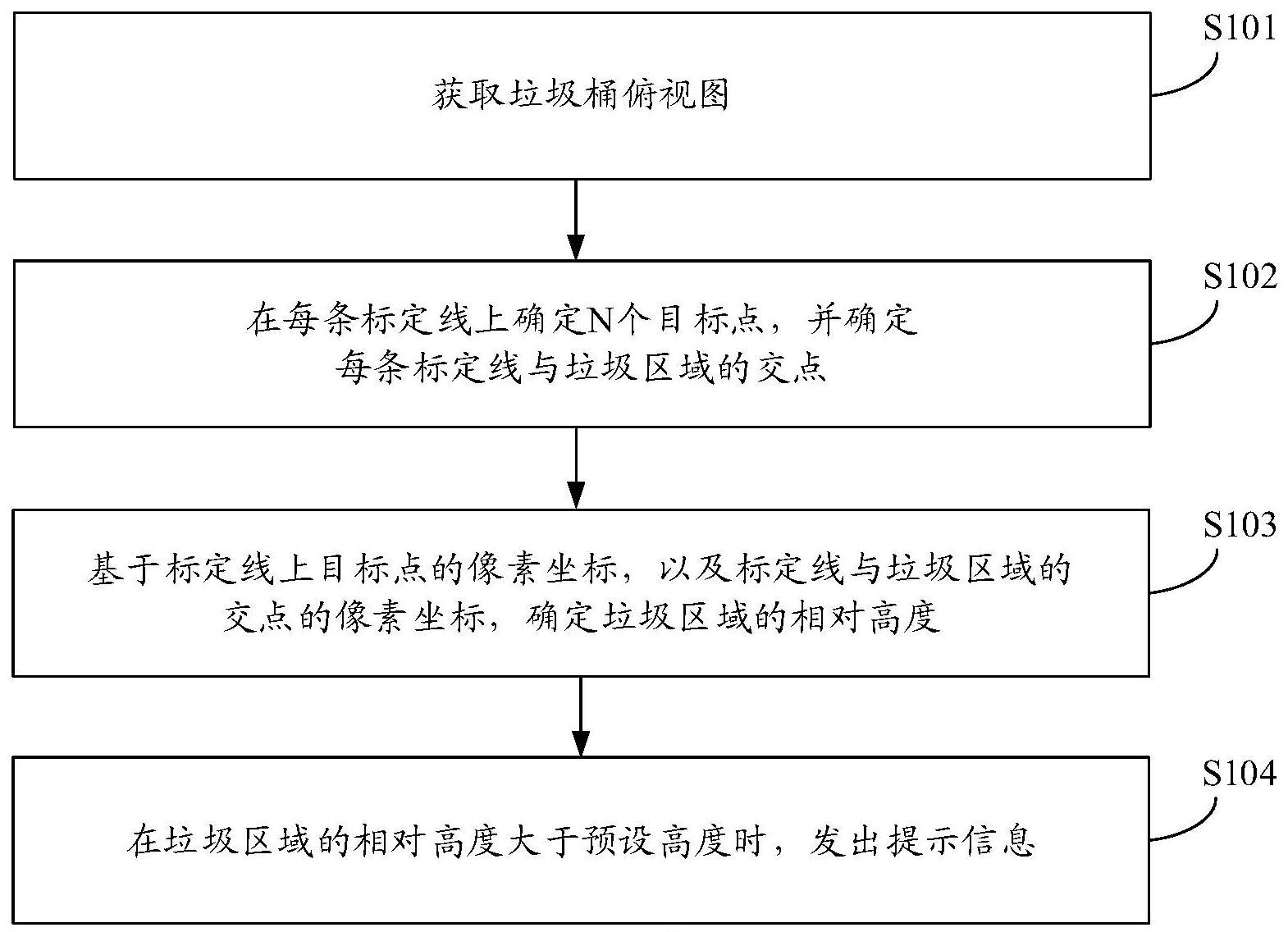
4、获取垃圾桶俯视图,垃圾桶俯视图中包括m条标定线和垃圾区域,m为正整数;
5、在每条标定线上确定n个目标点,并确定每条标定线与垃圾区域的交点,n为正整数;
6、基于标定线上目标点的像素坐标,以及标定线与垃圾区域的交点的像素坐标,确定垃圾区域的相对高度;
7、在垃圾区域的相对高度大于预设高度时,发出提示信息,提示信息用于提示垃圾桶满溢。
8、本技术提供的技术方案至少带来以下有益效果:通过在垃圾桶俯视图中确定标定线和垃圾区域,结合每条标定线上n个目标点的像素坐标,以及标定线与垃圾区域的交点的像素坐标,确定出垃圾区域的相对高度,再将垃圾区域的相对高度与预设高度进行比较。当垃圾区域的相对高度大于预设高度时,表示垃圾桶内的垃圾即将放满,在较短时间内有溢出的可能性,此时电子设备发出提示信息,可以提示用户及时清理垃圾桶内的垃圾,避免出现垃圾满溢之后造成清理困难的问题。如此一来,在只能获取到垃圾桶上方垂直拍摄的图像时,也可以准确确定出垃圾桶是否满溢,及时提醒用户清理垃圾。
9、在一种可能的实现方式中,基于标定线上目标点的像素坐标,以及标定线与垃圾区域的交点的像素坐标,确定垃圾区域的相对高度,包括:对于每一个标定线,基于标定线上n个目标点的像素坐标,以及标定线与垃圾区域的交点的像素坐标,确定标定线与垃圾区域的交点的相对高度;基于所有标定线与垃圾区域的交点的相对高度,确定垃圾区域的相对高度。
10、在一种可能的实现方式中,n为大于或等于3的正整数,标定线上n个目标点至少包括第一目标点、第二目标点和第三目标点;基于标定线上目标点的像素坐标,以及标定线与垃圾区域的交点的像素坐标,确定标定线与垃圾区域的交点的相对高度,包括:基于交比不变原理,确定第一像素距离、第二像素距离、第三像素距离、第四像素距离、第一实际距离、第二实际距离、第三实际距离以及第四实际距离之间的变换关系;基于第一实际点、第二实际点和第三实际点之间的空间几何关系,确定第一实际距离与第一相对高度之间的变换关系、第二实际距离与第二相对高度之间的变换关系、第三实际距离与第三相对高度之间的变换关系,以及第四实际距离与第四相对高度之间的变换关系,第一实际点为第一目标点在物理世界中对应的实际点,第二实际点为第二目标点在物理世界中对应的实际点,第三实际点为第三目标点在物理世界中对应的实际点;基于第一像素距离、第二像素距离、第三像素距离、第四像素距离、第一实际距离、第二实际距离、第三实际距离以及第四实际距离之间的变换关系,以及第一实际距离与第一相对高度之间的变换关系、第二实际距离与第二相对高度之间的变换关系、第三实际距离与第三相对高度之间的变换关系、第四实际距离与第四相对高度之间的变换关系,确定标定线与垃圾区域的交点的相对高度;其中,第一像素距离为第一目标点与第三目标点之间的像素距离,第二像素距离为第二目标点与第三目标点之间的像素距离,第三像素距离为第二目标点与标定线与垃圾区域的交点之间的像素距离,第四像素距离为第一目标点与标定线与垃圾区域的交点之间的像素距离;第一实际距离为第一实际点与第三实际点之间的实际距离,第二实际距离为第二实际点与第三实际点之间的实际距离,第三实际距离为第二实际点与标定线与第四实际点之间的实际距离,第四实际距离为第一实际点与第四实际点之间的实际距离,第四实际点为标定线与垃圾区域的交点在物理世界中对应的实际点,第一相对高度为第一目标点的相对高度与第三目标点的相对高度之间的差值,第二相对高度为第二目标点的相对高度与第三目标点的相对高度之间的差值,第三相对高度为第二目标点的相对高度与标定线与垃圾区域的交点的相对高度之间的差值,第四相对高度为第一目标点的相对高度与标定线与垃圾区域的交点的相对高度之间的差值。
11、在一种可能的实现方式中,第一像素距离、第二像素距离、第三像素距离、第四像素距离、第一实际距离、第二实际距离、第三实际距离以及第四实际距离之间的变换关系为:第一比值与第二比值的乘积等于第三比值与第四比值的乘积;其中,第一比值为第一像素距离与第二像素距离的比值,第二比值为第三像素距离与第四像素距离的比值,第三比值为第一实际距离与第二实际距离的比值,第四比值为第三实际距离与第四实际距离的比值。
12、在一种可能的实现方式中,获取垃圾桶俯视图,包括:在第一俯视图中确定m条标定线,并在第二俯视图中确定垃圾区域,第一俯视图为垃圾桶内无垃圾时的俯视图像,第二俯视图为垃圾桶当前的俯视图像,第一俯视图的采集方位和第二俯视图的采集方位相同;基于确定出m条标定线的第一俯视图,以及确定出垃圾区域的第二俯视图,得到垃圾桶俯视图。
13、在一种可能的实现方式中,在第一俯视图中确定m条标定线,包括:从第一俯视图中确定垃圾桶的底部区域和桶口区域;基于底部区域的边界和桶口区域的边界,确定m条标定线,每一条标定线的一个端点在桶口区域的边界上,另一个端点在底部区域的边界上。
14、第二方面,本技术提供一种提示装置,包括:
15、获取模块,用于获取垃圾桶俯视图,垃圾桶俯视图中包括m条标定线和垃圾区域,m为正整数;
16、处理模块,用于在每条标定线上确定n个目标点,并确定每条标定线与垃圾区域的交点,n为正整数;
17、处理模块还用于,基于标定线上目标点的像素坐标,以及标定线与垃圾区域的交点的像素坐标,确定垃圾区域的相对高度;
18、提示模块,用于在垃圾区域的相对高度大于预设高度时,发出提示信息,提示信息用于提示垃圾桶满溢。
19、在一种可能的实现方式中,处理模块具体用于,对于每一个标定线,基于标定线上n个目标点的像素坐标,以及标定线与垃圾区域的交点的像素坐标,确定标定线与垃圾区域的交点的相对高度;基于所有标定线与垃圾区域的交点的相对高度,确定垃圾区域的相对高度。
20、在一种可能的实现方式中,n为大于或等于3的正整数,标定线上n个目标点至少包括第一目标点、第二目标点和第三目标点;处理模块具体用于,基于交比不变原理,确定第一像素距离、第二像素距离、第三像素距离、第四像素距离、第一实际距离、第二实际距离、第三实际距离以及第四实际距离之间的变换关系;基于第一实际点、第二实际点和第三实际点之间的空间几何关系,确定第一实际距离与第一相对高度之间的变换关系、第二实际距离与第二相对高度之间的变换关系、第三实际距离与第三相对高度之间的变换关系,以及第四实际距离与第四相对高度之间的变换关系,第一实际点为第一目标点在物理世界中对应的实际点,第二实际点为第二目标点在物理世界中对应的实际点,第三实际点为第三目标点在物理世界中对应的实际点;基于第一像素距离、第二像素距离、第三像素距离、第四像素距离、第一实际距离、第二实际距离、第三实际距离以及第四实际距离之间的变换关系,以及第一实际距离与第一相对高度之间的变换关系、第二实际距离与第二相对高度之间的变换关系、第三实际距离与第三相对高度之间的变换关系、第四实际距离与第四相对高度之间的变换关系,确定标定线与垃圾区域的交点的相对高度;其中,第一像素距离为第一目标点与第三目标点之间的像素距离,第二像素距离为第二目标点与第三目标点之间的像素距离,第三像素距离为第二目标点与标定线与垃圾区域的交点之间的像素距离,第四像素距离为第一目标点与标定线与垃圾区域的交点之间的像素距离;第一实际距离为第一实际点与第三实际点之间的实际距离,第二实际距离为第二实际点与第三实际点之间的实际距离,第三实际距离为第二实际点与标定线与第四实际点之间的实际距离,第四实际距离为第一实际点与第四实际点之间的实际距离,第四实际点为标定线与垃圾区域的交点在物理世界中对应的实际点,第一相对高度为第一目标点的相对高度与第三目标点的相对高度之间的差值,第二相对高度为第二目标点的相对高度与第三目标点的相对高度之间的差值,第三相对高度为第二目标点的相对高度与标定线与垃圾区域的交点的相对高度之间的差值,第四相对高度为第一目标点的相对高度与标定线与垃圾区域的交点的相对高度之间的差值。
21、在一种可能的实现方式中,第一像素距离、第二像素距离、第三像素距离、第四像素距离、第一实际距离、第二实际距离、第三实际距离以及第四实际距离之间的变换关系为:第一比值与第二比值的乘积等于第三比值与第四比值的乘积;其中,第一比值为第一像素距离与第二像素距离的比值,第二比值为第三像素距离与第四像素距离的比值,第三比值为第一实际距离与第二实际距离的比值,第四比值为第三实际距离与第四实际距离的比值。
22、在一种可能的实现方式中,获取模块具体用于:获取第一俯视图和第二俯视图;处理模块还用于,在第一俯视图中确定m条标定线,并在第二俯视图中确定垃圾区域,第一俯视图为垃圾桶内无垃圾时的俯视图像,第二俯视图为垃圾桶当前的俯视图像,第一俯视图的采集方位和第二俯视图的采集方位相同;基于确定出m条标定线的第一俯视图,以及确定出垃圾区域的第二俯视图,得到垃圾桶俯视图。
23、在一种可能的实现方式中,处理模块具体用于,从第一俯视图中确定垃圾桶的底部区域和桶口区域;基于底部区域的边界和桶口区域的边界,确定m条标定线,每一条标定线的一个端点在桶口区域的边界上,另一个端点在底部区域的边界上。
24、第三方面,本技术提供一种电子设备,包括:一个或多个处理器;一个或多个存储器;其中,一个或多个存储器用于存储计算机程序代码,计算机程序代码包括计算机指令,当一个或多个处理器执行计算机指令时,电子设备执行上述第一方面所提供的任一种提示方法。
25、第四方面,本技术提供一种计算机可读存储介质,计算机可读存储介质存储有计算机执行指令,当计算机执行指令在计算机上运行时,使得计算机执行上述第一方面所提供的任一种提示方法。
26、第五方面,本技术提供一种计算机程序产品,该计算机程序产品包括计算机指令,当计算机指令在电子设备上运行时,使得电子设备执行如第一方面及其任一种可能的设计方式所述的提示方法。
27、本技术中第二方面到第五方面及其各种实现方式的具体描述,可以参考第一方面及其各种实现方式中的详细描述;并且,第二方面到第五方面及其各种实现方式的有益效果,可以参考第一方面及其各种实现方式中的有益效果分析,此处不再赘述。
28、本技术的这些方面或其他方面在以下的描述中会更加简明易懂。
- 还没有人留言评论。精彩留言会获得点赞!