一种考虑多目标点的车辆轨迹预测方法及系统
本发明涉及自动驾驶,更具体的说是涉及一种考虑多目标点的车辆轨迹预测方法及系统。
背景技术:
1、目前自动驾驶系统包含感知、决策规划和控制等模块,如果直接进行决策规划是需要极高的实时处理能力,需要以当前环境状态及时调整驾驶策略。但在实际情况中,一方面以感知作为输入,再进行数据处理与控制,是存在时滞影响;另一方面,不考虑它车的规划,每辆车都只注重自身当下的局部最优解,这样的非全局最优的决策规划也并不有利于改善交通现状,同时因为所有交通参与者都是动态的不定因素,所以自车也很难规划出一条安全的轨迹。而处理这种问题的有效方法便是轨迹预测,预测周围交通参与者未来的行为轨迹,从而可以不断优化驾驶策略,更好地规划自车轨迹。
2、现阶段轨迹预测包括基于物理模型,如恒速、恒加速度、恒转角和转速等,但只适合短时预测;基于意图的模型,如原型轨迹聚类、隐马尔可夫意图预测、动态贝叶斯网络等,在长时预测中虽然比前者更准确,但未考虑周围车辆之间的相互影响;基于交互行为模型,则更符合现实情况,通过估计潜在的车车交互,对所有车辆有更准确的长时预测,该模型也通常采用深度学习的方式,如包括基于lstm的循环神经网络,基于社交池的卷积神经网络,基于车辆间位置拓扑结构的图神经网络,但大多只对历史时序进行特征提取然后直接预测轨迹,并未将未来的多种可能性融入考虑,导致平均误差较高。
3、因此,如何解决车辆轨迹长时预测的准确性是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种考虑多目标点的车辆轨迹预测方法及系统以解决背景技术中提到的问题。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种考虑多目标点的车辆轨迹预测方法,包括以下步骤:
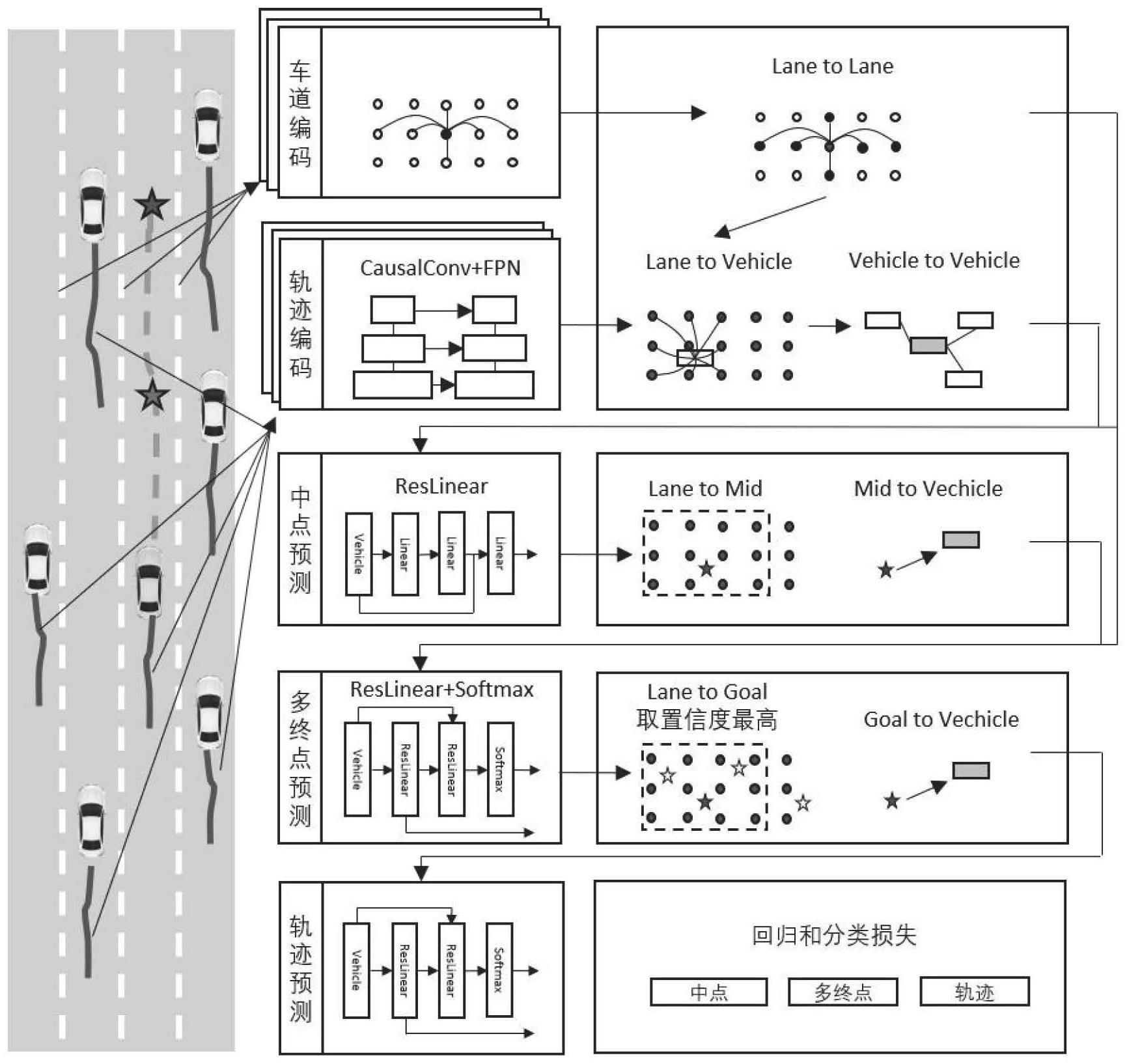
4、s1.分别提取当前交通场景下所有车辆的车辆历史轨迹特征和车道中心线环境特征;
5、s2.对车道中心环境特征进行传播和更新,将更新后的车道中心线环境特征作为约束,采用空间交叉注意力机制与车辆历史轨迹特征进行特征融合,再将各车辆的融合特征采用空间自注意力机制进行带约束的车与车特征交互;
6、s3.分别预测各车辆的目标点,目标点包括中点和多个终点,并将中点和置信度最高的终点附近的车道环境特征赋予车辆特征中;
7、s4.解码输出预测的多条轨迹及置信度,并通过滤波算法对预测轨迹进行平滑处理。
8、优选的,步骤s1中提取车辆历史特征的具体内容包括:
9、s11.获取所有车辆在当前交通场景的历史轨迹,选取目标车辆建立局部坐标系,获得目标车辆和周围车辆的历史轨迹输入信息,历史轨迹输入信息包括相邻时刻的相对距离,平均速度,方向信息,以及表示轨迹点是否存在的标志位;
10、s12.根据历史轨迹输入信息,采用fpn结构下的残差因果卷积网络,进行分层特征提取和多层特征融合,获得历史轨迹特征。
11、优选的,步骤s1中提取车道中心线环境特征的具体内容包括:
12、s13.构建当前交通场景下的车道中心线道路拓扑图,将车道中心线节点特征通过mlp对位置信息和形状信息进行整合;
13、s14.利用空洞卷积,将前后不同距离节点特征进行多空洞率合并,获得潜在的方向性约束,再将左右相邻节点特征采用可学习的权重,获得横向的车道线约束,同时加入当前节点特征,获得车道中心线环境特征。
14、优选的,步骤s2的具体内容包括:
15、s21.利用空洞卷积传播和更新已聚合的车道中心环境特征;
16、s22.根据相对距离筛选出当前时刻车辆位置附近所包含的道路节点,并将节点到车辆位置的距离作为位置编码,和车辆特征与车道中心线特征拼接后进行mlp全连接层学习,通过该空间注意力实现车道线与车的特征交互;
17、s23.根据相对距离筛选每一辆车附近会发生潜在交互的车辆,并将车辆到车辆的距离作为位置编码,通过该空间注意力机制,实现车与车的特征交互。
18、优选的,步骤s3的具体内容包括:
19、s31.使用残差全连接层对未来轨迹的中点位置进行预测,并将中点附近的车道线环境特征通过空间注意力机制赋予每个车辆;
20、s32.利用复合残差全连接层预测多个未来轨迹终点位置,将起终点相对距离作为位置编码进行拼接后使用残差全连接层解码,通过softmax得到对应每个终点的置信度;
21、s33.将与置信度最高的终点的相对距离在预设阈值范围内的车道中心线环境特征,通过注意力机制赋予每个车辆,输出目标车辆特征。
22、优选的,目标车辆特征包括车辆历史轨迹信息,环境信息,潜在的交互信息,以及目标点位置的约束。
23、优选的,步骤s4的具体内容包括:
24、s41.采用平行的多个残差全连接层,输出多条完整的轨迹点,将起终点相对距离作为位置编码进行拼接后使用残差全连接层解码,通过softmax得到对应每条预测轨迹的置信度;
25、s42.轨迹平滑,基于局部最小二乘多项式逼近的数据平滑方法,对一定长度窗口内的数据点进行n阶多项式拟合,最终输出平滑后预测轨迹。
26、优选的,目标点预测和轨迹预测包括的损失函数具体为:
27、中点预测损示为:
28、
29、其中,pmid,n表示第n辆车的中点预测位置,pgtm,n表示第n辆车的真实中点位置;
30、多终点预测损失,包含分类和回归两部分损失:
31、lmulti=lmulti,cls+lmulti,reg
32、其中,分类损失采用最大边缘损失:
33、
34、其中,cmulti,k表示多终点预测的k模态对应的置信度值,ε表示定义的裕度,max表示如果其他置信度比所选的最高置信度小于改阈值,则记为0,若大则会产生损失值,需要反向传播优化,确保后续置信度最高的终点为当前所选的最优终点;
35、回归损失:
36、
37、其中,k表示选择置信度最高的终点,pgt,n表示第n辆车的真实终点位置;
38、轨迹预测损失,包括分类损失和回归损示:
39、ltraj=ltraj,cls+ltraj,reg.
40、其中:
41、
42、
43、最终,总损失为:
44、l=lmid+lmulti+ltraj。
45、一种考虑多目标点的车辆轨迹预测系统,基于所述的一种考虑多目标点的车辆轨迹预测方法,包括车辆特征与车道线中心线特征提取网络,特征融合网络,目标点预测网络和特征解码网络;
46、车辆特征与车道线中心线特征提取网络,用于分别提取当前交通场景下所有车辆的车辆历史轨迹特征和车道中心线环境特征;
47、特征融合网络,用于对车道中心新环境特征进行传播和更新,将更新后的车道中心线环境特征作为约束,采用空间交叉注意力机制将约束赋予车辆特征中,再将各车辆的融合特征采用空间自注意力机制进行带约束的车与车特征交互;
48、目标点预测网络,用于分别预测各目标点,目标点包括中点和多个终点,并将中点和置信度最高的终点附近的车道环境特征赋予车辆特征中;
49、特征解码网络,用于解码输出预测的多条轨迹及置信度,并通过滤波算法对预测轨迹进行平滑处理。
50、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种考虑多目标点的车辆轨迹预测方法及系统,采用因果卷积对车辆历史特征进行提取,采用空洞车道卷积学习环境特征,使用空间交叉注意力机制融合环境信息和车车交互信息;考虑未来轨迹的目标点包括中点以及多可能性的终点进行预测,来直接限制预测轨迹的平均误差,最终预测完整的多条轨迹及对应的置信度,增加了轨迹预测结果的准确性,并保留了未来预测的多可能性预测。
- 还没有人留言评论。精彩留言会获得点赞!