相机外参标定系数的确定方法、装置、设备及存储介质与流程
本申请属于人工智能,尤其涉及一种相机外参标定系数的确定方法、装置、设备及存储介质。
背景技术:
1、随着人工智能、自动驾驶技术的快速发展,具备智能化算法的相机因其能够对其可视化范围内的交通参与者进行检测、跟踪以及高精度定位,而逐渐成为车路协同、智慧交通中不可或缺的一环。
2、为了精准确定交通参与者的位置与行进方向,通常需要先通过相机获取交通参与者在相机坐标系下的相对定位信息,再通过外参标定的方法,将相对定位信息转换为世界坐标系下的绝对定位信息。
3、然而,依靠现有技术对相机进行外参标定时,过程繁琐且标定精度较低,难以获取交通参与者的精确定位。
技术实现思路
1、本申请实施例提供了一种相机外参标定系数的确定方法、装置、设备及存储介质,能够得到精度较高的外参标定系数,进而提高相机外参标定的精度。
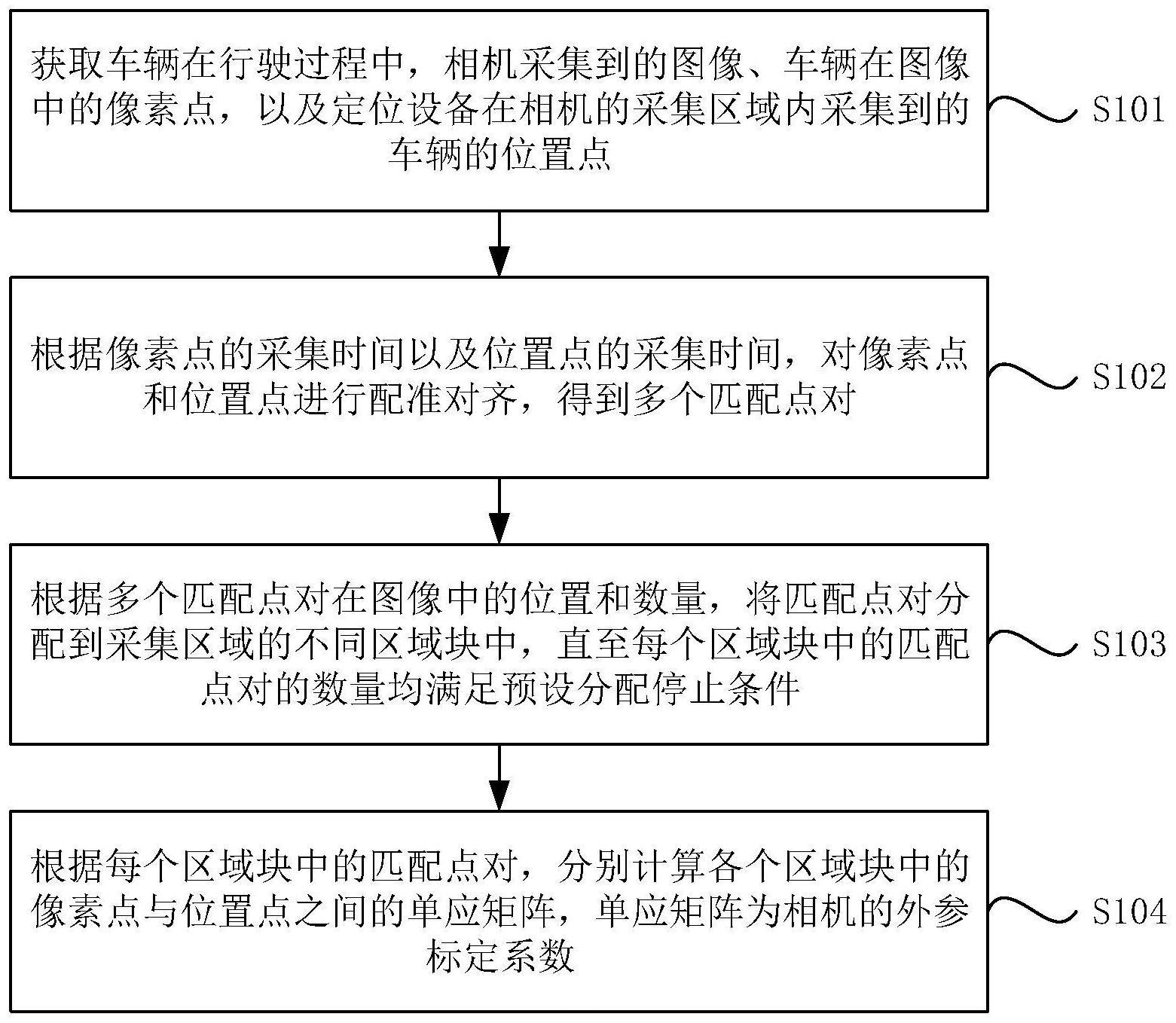
2、第一方面,本申请实施例提供了一种相机外参标定系数的确定方法,相机外参标定系数的确定方法包括:获取车辆在行驶过程中,相机采集到的图像、车辆在图像中的像素点,以及定位设备在相机的采集区域内采集到的车辆的位置点;根据像素点的采集时间以及位置点的采集时间,对像素点和位置点进行配准对齐,得到多个匹配点对;根据多个匹配点对在图像中的位置和数量,将匹配点对分配到采集区域的不同区域块中,直至每个区域块中的匹配点对的数量均满足预设分配停止条件;根据每个区域块中的匹配点对,分别计算各个区域块中的像素点与位置点之间的单应矩阵,单应矩阵为相机的外参标定系数。
3、根据本申请第一方面的实施方式,根据像素点的采集时间以及位置点的采集时间,对像素点和位置点进行配准对齐,得到多个匹配点对,包括:按照第一数据点的采集时间对第一数据点进行采样,得到n个第一采样点;按照第二数据点的采集时间对第二数据点进行m次采样,得到m组第二采样点,每组第二采样点包括n个第二采样点,第m次采样时第二采样点的采样时刻t2i=t1i+m*δt,其中,t1i表示第一采样点的采样时刻,δt表示第一采样点和第二采样点的采样时差的步进单位;将n个第一采样点分别与m组第二采样点中的n个第二采样点组成准匹配点对,得到m组准匹配点对,同一组准匹配点对中,组成准匹配点对的第一采样点和第二采样点的采样时差相等;计算每组准匹配点对的重投影误差;将重投影误差最小的一组准匹配点对作为匹配点对;第一数据点和第二数据点中的一个为像素点,另一个为位置点。
4、根据本申请第一方面前述任一实施方式,计算每组准匹配点对的重投影误差,包括:基于直接线性变换算法,计算每组准匹配点对中的第一采样点与第二采样点之间的单应矩阵;根据单应矩阵,以及每组准匹配点对中组成准匹配点对的第一采样点和第二采样点,计算每组准匹配点对中每个准匹配点对的重投影误差;将每组准匹配点中各个准匹配点对的重投影误差的平均值,作为每组准匹配点对的重投影误差。
5、根据本申请第一方面前述任一实施方式,根据多个匹配点对在图像中的位置和数量,将匹配点对分配到采集区域的不同区域块中,直至每个区域块中的匹配点对的数量均满足预设分配停止条件,包括:根据多个匹配点对在图像中的位置,确定多个匹配点对分别到图像的第一目标边缘的第一距离,第一目标边缘为图像的任意一条边缘;基于二分法和第一距离,将匹配点对分配到采集区域的不同区域块中;在存在匹配点对的数量不满足预设分配停止条件的区域块的情况下,确定不满足预设分配停止条件的区域块中的匹配点对分别到区域块的第二目标边缘的第二距离;基于二分法和第二距离,将匹配点对再次分配到采集区域的不同区域块中;在存在匹配点对的数量不满足预设分配停止条件的区域块的情况下,将不满足预设分配停止条件的区域块中的匹配点对分别到区域块的第三目标边缘的距离,确定为第一距离,返回基于二分法和第一距离,将匹配点对分配到采集区域的不同区域块中,直至每个区域块中的匹配点对的数量均满足预设分配停止条件;第一目标边缘与第三目标边缘的方向相互平行,第二目标边缘与第一目标边缘和第三目标边缘的方向相互垂直。
6、根据本申请第一方面前述任一实施方式,根据每个区域块中的匹配点对,分别计算各个区域块中的像素点与位置点之间的单应矩阵,包括:将每个区域块中的匹配点对分别输入至直接线性变换算法,得到各个区域块中的像素点与位置点之间的单应矩阵。
7、根据本申请第一方面前述任一实施方式,在根据每个区域块中的匹配点对,分别计算各个区域块中的像素点与位置点之间的单应矩阵之后,相机外参标定系数的确定方法还包括:基于高斯-牛顿算法和/或列文伯格-马夸尔特算法,对单应矩阵进行迭代运算,得到精度更高的各个区域块中的像素点与位置点之间的单应矩阵。
8、根据本申请第一方面前述任一实施方式,预设分配停止条件为对区域块中的匹配点对进行再分配时,存在匹配点对的数量小于目标数量的区域块,目标数量为计算单应矩阵所需的匹配点对的最小数量。
9、第二方面,本申请实施例提供了一种相机外参标定系数的确定装置,相机外参标定系数的确定装置包括:获取模块,用于获取车辆在行驶过程中,相机采集到的图像、车辆在图像中的像素点,以及定位设备在相机的采集区域内采集到的车辆的位置点;配准对齐模块,用于根据像素点的采集时间以及位置点的采集时间,对像素点和位置点进行配准对齐,得到多个匹配点对;分配模块,用于根据多个匹配点对在图像中的位置和数量,将匹配点对分配到采集区域的不同区域块中,直至每个区域块中的匹配点对的数量均满足预设分配停止条件;计算模块,用于根据每个区域块中的匹配点对,分别计算各个区域块中的像素点与位置点之间的单应矩阵,单应矩阵为相机的外参标定系数。
10、第三方面,本申请实施例提供了一种电子设备,电子设备包括:处理器、存储器及存储在存储器上并可在处理器上运行的计算机程序,计算机程序被处理器执行时实现如第一方面提供的相机外参标定系数的确定方法的步骤。
11、第四方面,本申请实施例提供了一种计算机可读存储介质,计算机可读存储介质上存储计算机程序,计算机程序被处理器执行时实现如第一方面提供的相机外参标定系数的确定方法的步骤。
12、本申请实施例的相机外参标定系数的确定方法、装置、设备及存储介质,结合相机采集到的图像与车辆在图像中的像素点,以及定位设备在相机的采集区域内采集到的车辆的位置点,确定相机的外参标定系数。根据像素点的采集时间以及位置点的采集时间,对像素点和位置点进行配准对齐,使像素点与位置点之间的对应关系更为精确,得到多个匹配点对。根据多个匹配点对在图像中的位置和数量,将匹配点对分配到采集区域的不同区域块中,这样便可根据不同区域块中的匹配点对,分别计算各个区域块的单应矩阵。由于各个区域块内部的道路路面相较于采集区域整体的道路路面跨度较小,所以更为接近计算单应矩阵时道路路面为平面的假设要求,因此,这样计算得到的各个区域块的单应矩阵的精度也较高。通过本申请实施例,能够提高相机采集区域不同区域块的外参标定系数的确定精度,进而提高相机外参标定的精度。
技术特征:
1.一种相机外参标定系数的确定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述像素点的采集时间以及所述位置点的采集时间,对所述像素点和所述位置点进行配准对齐,得到多个匹配点对,包括:
3.根据权利要求2所述的方法,其特征在于,所述计算每组准匹配点对的重投影误差,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述多个匹配点对在图像中的位置和数量,将所述匹配点对分配到所述采集区域的不同区域块中,直至每个所述区域块中的匹配点对的数量均满足预设分配停止条件,包括:
5.根据权利要求1所述的方法,其特征在于,所述根据每个区域块中的匹配点对,分别计算各个区域块中的像素点与位置点之间的单应矩阵,包括:
6.根据权利要求1所述的方法,其特征在于,在所述根据每个区域块中的匹配点对,分别计算各个区域块中的像素点与位置点之间的单应矩阵之后,所述方法还包括:
7.根据权利要求1或4所述的方法,其特征在于,所述预设分配停止条件为对所述区域块中的匹配点对进行再分配时,存在匹配点对的数量小于目标数量的区域块,所述目标数量为计算单应矩阵所需的匹配点对的最小数量。
8.一种相机外参标定系数的确定装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至7中任一项所述的相机外参标定系数的确定方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述的相机外参标定系数的确定方法的步骤。
技术总结
本申请实施例提供了一种相机外参标定系数的确定方法、装置、设备及存储介质,方法包括:获取车辆在行驶过程中,相机采集到的图像、车辆在图像中的像素点,以及定位设备在相机的采集区域内采集到的车辆的位置点;根据像素点的采集时间以及位置点的采集时间,对像素点和位置点进行配准对齐,得到多个匹配点对;根据多个匹配点对在图像中的位置和数量,将匹配点对分配到采集区域的不同区域块中,直至每个区域块中的匹配点对的数量均满足预设分配停止条件;根据每个区域块中的匹配点对,分别计算各个区域块中的像素点与位置点之间的单应矩阵。根据本申请实施例,能够得到精度较高的外参标定系数,进而提高相机外参标定的精度。
技术研发人员:张宇阳,蒲玉平,蓝海波,滕雨橦,陈晓炬,兰永亮,王帆帆
受保护的技术使用者:西安中科创达软件有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!