雷达扫描频率提升方法、装置、计算机设备和存储介质
本技术涉及激光雷达,特别是涉及一种雷达扫描频率提升方法、装置、计算机设备和存储介质。
背景技术:
1、高扫描频率能够提高激光雷达的图像空间分辨率,而大口径激光雷达则能够提高激光雷达探测距离并提供更精准的目标位置信息。然而大口径和扫描频率之间存在着矛盾关系,较大的口径增加了扫描镜的转动惯量和质量,导致需要更大的驱动力和更长的加速时间才能完成一个周期的扫描,从而限制了扫描镜的最大扫描频率,因此,如何在确保大口径不变的情况下,提升激光雷达的扫描频率是当前的研究重点。
2、传统的提高扫描频率的方式是通过提高扫描镜扭梁的刚度,通过提高电流强度可以直接提高线圈所受电磁力,从而提升激光雷达的扫描频率,但是线圈较小的线径耐受电流较小,对电磁力的提高是十分有限的,从而导致激光雷达的扫描频率较低。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种雷达扫描频率提升方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种雷达扫描频率提升方法。所述方法包括:
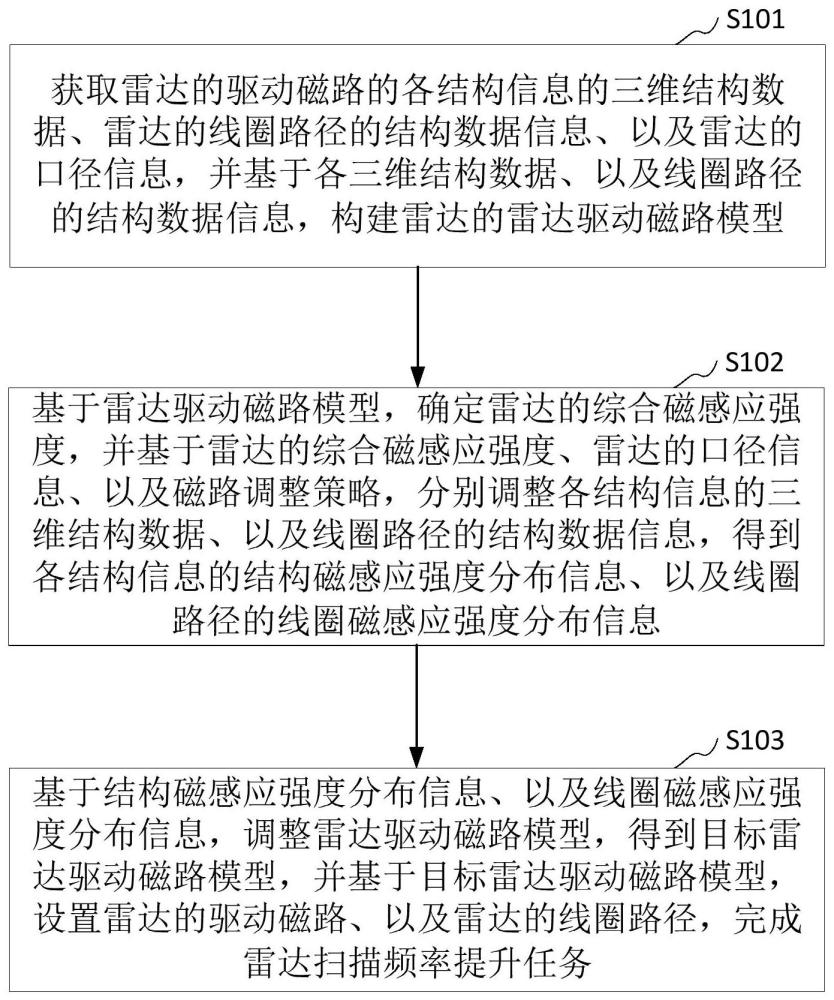
3、获取雷达的驱动磁路的各结构信息的三维结构数据、所述雷达的线圈路径的结构数据信息、以及所述雷达的口径信息,并基于各所述三维结构数据、以及所述线圈路径的结构数据信息,构建所述雷达的雷达驱动磁路模型;
4、基于所述雷达驱动磁路模型,确定所述雷达的综合磁感应强度,并基于所述雷达的综合磁感应强度、所述雷达的口径信息、以及磁路调整策略,分别调整各所述结构信息的三维结构数据、以及所述线圈路径的结构数据信息,得到各所述结构信息的结构磁感应强度分布信息、以及所述线圈路径的线圈磁感应强度分布信息;
5、基于所述结构磁感应强度分布信息、以及所述线圈磁感应强度分布信息,调整所述雷达驱动磁路模型,得到目标雷达驱动磁路模型,并基于所述目标雷达驱动磁路模型,设置所述雷达的驱动磁路、以及所述雷达的线圈路径,完成雷达扫描频率提升任务。
6、可选的,所述基于各所述三维结构数据、以及所述线圈路径的结构数据信息,构建所述雷达的雷达驱动磁路模型,包括:
7、基于各所述三维结构数据,识别各所述结构信息之间的连接关系,以及各所述结构信息之间的形状参数,并基于所述线圈路径的结构数据信息,识别所述线圈路径与各所述结构信息之间的连接关系、以及所述线圈路径的路径参数;
8、基于各所述结构信息之间的连接关系、各所述结构信息之间的形状参数、所述线圈路径与各所述结构信息之间的连接关系、以及所述线圈路径的路径参数,构建所述雷达的雷达驱动磁路模型。
9、可选的,所述基于所述雷达的综合磁感应强度、所述雷达的口径信息、以及磁路调整策略,分别调整各所述结构信息的三维结构数据、以及所述线圈路径的结构数据信息,得到各所述结构信息的结构磁感应强度分布信息、以及所述线圈路径的线圈磁感应强度分布信息,包括:
10、基于所述雷达的口径信息,确定各所述结构信息的三维结构数据的第一调整上限、以及所述线圈路径的结构数据信息的第二调整上限;
11、基于磁路调整策略,确定各所述结构信息的三维结构数据的第一单位调整数据的、以及所述线圈路径的结构数据信息的第二单位调整数据;
12、基于所述第一调整上限、所述第二调整上限、所述第一单位调整数据、以及所述第二单位调整数据,分别调整各所述结构信息的三维结构数据、以及所述线圈路径的结构数据信息,得到每个结构信息的各新三维结构数据、以及所述线圈路径的各新结构数据信息;
13、基于每个结构信息的各新三维结构数据、以及所述线圈路径的各新结构数据信息,确定所述雷达的各新综合磁感应强度,并基于所述雷达的各新综合磁感应强度、以及所述雷达的综合磁感应强度,确定各所述结构信息的结构磁感应强度分布信息、以及所述线圈路径的线圈磁感应强度分布信息。
14、可选的,所述基于每个结构信息的各新三维结构数据、以及所述线圈路径的各新结构数据信息,确定所述雷达的各新综合磁感应强度,并基于所述雷达的各新综合磁感应强度,确定各所述结构信息的结构磁感应强度分布信息、以及所述线圈路径的线圈磁感应强度分布信息,包括:
15、基于单一变量法,分别筛选每个结构信息的新三维结构数据、或所述线圈路径的新结构数据信息,替换所述雷达驱动磁路模型中三维结构数据、或结构数据信息,并基于已替换的雷达驱动磁路模型,确定所述雷达的新综合磁感应强度;
16、计算所述新综合磁感应强度与所述综合磁感应强度的磁感应差值,并基于每个结构信息的各新三维结构数据对应的所述磁感应差值,确定所述结构信息的结构磁感应强度分布信息,基于所述线圈路径的各新结构数据信息对应的所述磁感应差值,确定所述线圈路径的线圈磁感应强度分布信息。
17、可选的,所述基于所述结构磁感应强度分布信息、以及所述线圈磁感应强度分布信息,调整所述雷达驱动磁路模型,得到目标雷达驱动磁路模型,包括:
18、基于所述结构磁感应强度分布信息,识别每个结构信息的第一单位调整数据对应的线圈磁感应强度变化信息,并基于每个结构信息的第一单位调整数据对应的线圈磁感应强度变化信息,确定最大结构磁感应强度对应的每个结构信息的目标三维结构数据;
19、基于所述线圈磁感应强度分布信息,识别所述线圈磁感应强度分布信息对应的扭转力矩分布信息,并基于所述扭转力矩分布信息、以及所述线圈磁感应强度分布信息,确定所述线圈路径的目标结构数据信息;
20、基于各所述结构信息的目标三维结构数据、以及所述线圈路径的目标结构数据信息,确定目标雷达驱动磁路模型。
21、可选的,所述基于所述线圈磁感应强度分布信息,识别所述线圈磁感应强度分布信息对应的扭转力矩分布信息,并基于所述扭转力矩分布信息、以及所述线圈磁感应强度分布信息,确定所述线圈路径的目标结构数据信息,包括:
22、基于所述线圈磁感应强度分布信息中每个线圈磁感应强度对应的所述线圈路径的新结构数据信息,计算所述新结构数据信息对应的扭转力矩,并将各所述扭转力矩,按照各所述扭转力矩对应的线圈磁感应强度的线圈磁感应强度分布信息进行排序,得到所述线圈磁感应强度分布信息对应的扭转力矩分布信息;
23、在各所述新结构数据信息中,筛选大于预设扭转力矩阈值的目标扭转力矩对应的新结构数据信息,得到第一新结构数据信息组,并在各所述新结构数据信息中,筛选大于预设磁感应强度阈值的线圈磁感应强度对应的新结构数据信息,得到第二新结构数据信息组;
24、筛选所述第一新结构数据信息组,与所述第二新结构数据信息组中均包含的新结构数据信息,作为候选新结构数据信息,并在各所述候选新结构数据信息中,筛选最大扭转力矩对应的新结构数据信息,作为所述线圈路径的目标结构数据信息。
25、第二方面,本技术还提供了一种雷达扫描频率提升装置。所述装置包括:
26、获取模块,用于获取雷达的驱动磁路的各结构信息的三维结构数据、所述雷达的线圈路径的结构数据信息、以及所述雷达的口径信息,并基于各所述三维结构数据、以及所述线圈路径的结构数据信息,构建所述雷达的雷达驱动磁路模型;
27、调整模块,用于基于所述雷达驱动磁路模型,确定所述雷达的综合磁感应强度,并基于所述雷达的综合磁感应强度、所述雷达的口径信息、以及磁路调整策略,分别调整各所述结构信息的三维结构数据、以及所述线圈路径的结构数据信息,得到各所述结构信息的结构磁感应强度分布信息、以及所述线圈路径的线圈磁感应强度分布信息;
28、设置模块,用于基于所述结构磁感应强度分布信息、以及所述线圈磁感应强度分布信息,调整所述雷达驱动磁路模型,得到目标雷达驱动磁路模型,并基于所述目标雷达驱动磁路模型,设置所述雷达的驱动磁路、以及所述雷达的线圈路径,完成雷达扫描频率提升任务。
29、可选的,所述获取模块,具体用于:
30、基于各所述三维结构数据,识别各所述结构信息之间的连接关系,以及各所述结构信息之间的形状参数,并基于所述线圈路径的结构数据信息,识别所述线圈路径与各所述结构信息之间的连接关系、以及所述线圈路径的路径参数;
31、基于各所述结构信息之间的连接关系、各所述结构信息之间的形状参数、所述线圈路径与各所述结构信息之间的连接关系、以及所述线圈路径的路径参数,构建所述雷达的雷达驱动磁路模型。
32、可选的,所述调整模块,具体用于:
33、基于所述雷达的口径信息,确定各所述结构信息的三维结构数据的第一调整上限、以及所述线圈路径的结构数据信息的第二调整上限;
34、基于磁路调整策略,确定各所述结构信息的三维结构数据的第一单位调整数据的、以及所述线圈路径的结构数据信息的第二单位调整数据;
35、基于所述第一调整上限、所述第二调整上限、所述第一单位调整数据、以及所述第二单位调整数据,分别调整各所述结构信息的三维结构数据、以及所述线圈路径的结构数据信息,得到每个结构信息的各新三维结构数据、以及所述线圈路径的各新结构数据信息;
36、基于每个结构信息的各新三维结构数据、以及所述线圈路径的各新结构数据信息,确定所述雷达的各新综合磁感应强度,并基于所述雷达的各新综合磁感应强度、以及所述雷达的综合磁感应强度,确定各所述结构信息的结构磁感应强度分布信息、以及所述线圈路径的线圈磁感应强度分布信息。
37、可选的,所述调整模块,具体用于:
38、基于单一变量法,分别筛选每个结构信息的新三维结构数据、或所述线圈路径的新结构数据信息,替换所述雷达驱动磁路模型中三维结构数据、或结构数据信息,并基于已替换的雷达驱动磁路模型,确定所述雷达的新综合磁感应强度;
39、计算所述新综合磁感应强度与所述综合磁感应强度的磁感应差值,并基于每个结构信息的各新三维结构数据对应的所述磁感应差值,确定所述结构信息的结构磁感应强度分布信息,基于所述线圈路径的各新结构数据信息对应的所述磁感应差值,确定所述线圈路径的线圈磁感应强度分布信息。
40、可选的,所述设置模块,具体用于:
41、基于所述结构磁感应强度分布信息,识别每个结构信息的第一单位调整数据对应的线圈磁感应强度变化信息,并基于每个结构信息的第一单位调整数据对应的线圈磁感应强度变化信息,确定最大结构磁感应强度对应的每个结构信息的目标三维结构数据;
42、基于所述线圈磁感应强度分布信息,识别所述线圈磁感应强度分布信息对应的扭转力矩分布信息,并基于所述扭转力矩分布信息、以及所述线圈磁感应强度分布信息,确定所述线圈路径的目标结构数据信息;
43、基于各所述结构信息的目标三维结构数据、以及所述线圈路径的目标结构数据信息,确定目标雷达驱动磁路模型。
44、可选的,所述设置模块,具体用于:
45、基于所述线圈磁感应强度分布信息中每个线圈磁感应强度对应的所述线圈路径的新结构数据信息,计算所述新结构数据信息对应的扭转力矩,并将各所述扭转力矩,按照各所述扭转力矩对应的线圈磁感应强度的线圈磁感应强度分布信息进行排序,得到所述线圈磁感应强度分布信息对应的扭转力矩分布信息;
46、在各所述新结构数据信息中,筛选大于预设扭转力矩阈值的目标扭转力矩对应的新结构数据信息,得到第一新结构数据信息组,并在各所述新结构数据信息中,筛选大于预设磁感应强度阈值的线圈磁感应强度对应的新结构数据信息,得到第二新结构数据信息组;
47、筛选所述第一新结构数据信息组,与所述第二新结构数据信息组中均包含的新结构数据信息,作为候选新结构数据信息,并在各所述候选新结构数据信息中,筛选最大扭转力矩对应的新结构数据信息,作为所述线圈路径的目标结构数据信息。
48、第三方面,本技术提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现第一方面中任一项所述的方法的步骤。
49、第四方面,本技术提供了一种计算机可读存储介质。其上存储有计算机程序,所述计算机程序被处理器执行时实现第一方面中任一项所述的方法的步骤。
50、第五方面,本技术提供了一种计算机程序产品。所述计算机程序产品包括计算机程序,该计算机程序被处理器执行时实现第一方面中任一项所述的方法的步骤。
51、上述雷达扫描频率提升方法、装置、计算机设备和存储介质,通过获取雷达的驱动磁路的各结构信息的三维结构数据、所述雷达的线圈路径的结构数据信息、以及所述雷达的口径信息,并基于各所述三维结构数据、以及所述线圈路径的结构数据信息,构建所述雷达的雷达驱动磁路模型;基于所述雷达驱动磁路模型,确定所述雷达的综合磁感应强度,并基于所述雷达的综合磁感应强度、所述雷达的口径信息、以及磁路调整策略,分别调整各所述结构信息的三维结构数据、以及所述线圈路径的结构数据信息,得到各所述结构信息的结构磁感应强度分布信息、以及所述线圈路径的线圈磁感应强度分布信息;基于所述结构磁感应强度分布信息、以及所述线圈磁感应强度分布信息,调整所述雷达驱动磁路模型,得到目标雷达驱动磁路模型,并基于所述目标雷达驱动磁路模型,设置所述雷达的驱动磁路、以及所述雷达的线圈路径,完成雷达扫描频率提升任务。通过在确保雷达的口径信息不变的情况下,综合考虑雷达的驱动磁路的各结构信息的三维结构数据、以及雷达的线圈路径的结构数据信息,并通过构建雷达驱动磁路模型的方式,确定各结构信息与线圈路径对应的综合磁感应强度。从而针对磁感应强度为基准,仿真乐达驱动磁路模型的运行方式,并调整各结构信息的三维结构数据、以及线圈路径的结构数据信息,从而得到各所述结构信息的结构磁感应强度分布信息、以及所述线圈路径的线圈磁感应强度分布信息。最后,通过所述结构磁感应强度分布信息、以及所述线圈磁感应强度分布信息,调整所述雷达驱动磁路模型,得到目标雷达驱动磁路模型。其中,调整各结构信息用于降低大口径扫描镜的转动惯量,提高快速扫描能力,通过调整线圈路径用于提升高速扫描大口径扫描镜的电磁驱动力。该方案不仅提升了雷达的扫描能力,又提升了高速扫描大口径扫描镜的电磁驱动力,从而提升了激光雷达的扫描频率。
- 还没有人留言评论。精彩留言会获得点赞!