一种基于无人机遥感的植被覆盖度测量方法与流程
本发明涉及植被覆盖测量,具体为一种基于无人机遥感的植被覆盖度测量方法。
背景技术:
1、植被覆盖度是描述地表被植被覆盖程度的指标,通常用于环境监测、生态学研究以及土地利用规划,利用卫星或无人机获取的遥感影像进行分析,通过图像处理和分类算法来测量植被覆盖度。常见的遥感影像包括多光谱和高光谱影像,可以通过不同的波段来识别和区分不同类型的植被。
2、在基于无人机遥感的植被覆盖度测量方法中,残差值可以用于评估测量结果的准确性和模型的拟合程度。
3、在一般的作业中,残差值的选择多为考虑外部因素,但是在实际的飞行遥感测量中,无人机的自身因素也会对残差值造成一定的干扰,进而导致残差值不准确,影响后续的图像定位结果。
技术实现思路
1、本发明提供了一种基于无人机遥感的植被覆盖度测量方法,具备将外部气象数据与无人机自身数据结合的有益效果,解决了上述背景技术中所提到导致残差值不准确,影响后续的图像定位结果的问题。
2、本发明提供如下技术方案:一种基于无人机遥感的植被覆盖度测量方法,包括以下步骤:
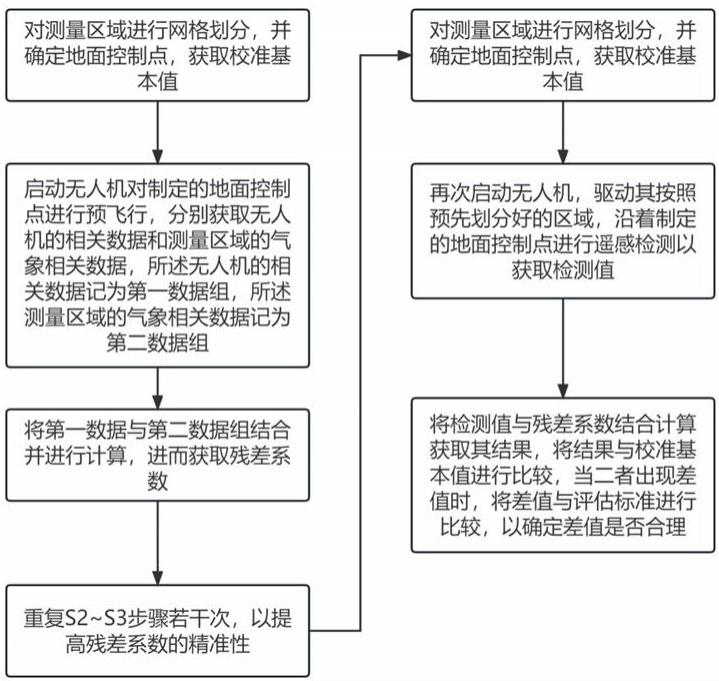
3、s1、对测量区域进行网格划分,并确定地面控制点,获取校准基本值;
4、s2、启动无人机对制定的地面控制点进行预飞行,分别获取无人机的相关数据和测量区域的气象相关数据,所述无人机的相关数据记为第一数据组,所述测量区域的气象相关数据记为第二数据组;
5、s3、将第一数据与第二数据组结合并进行计算,进而获取残差系数,具体计算公式如下:
6、;
7、式中为路径差系数,由第一数据和第二数据结合计算获取,为其权重系数,式中为拍照差值系数,由第一数据和第二数据结合计算获取,为其权重值,式中为大气干扰系数,由第二数据计算获取,为其权重系数,式中为光照干扰系数,由第二数据计算获取,其权重系数;
8、式中为修正系数,,且,且的值由客户自行选取设置;
9、s4、重复s2~s3步骤若干次,以提高残差系数的精准性;
10、s5、再次启动无人机,驱动其按照预先划分好的区域,沿着制定的地面控制点进行遥感检测以获取检测值;
11、s6、将检测值与残差系数结合计算获取其结果,将结果与校准基本值进行比较,当二者出现差值时,将差值与评估标准进行比较,以确定差值是否合理。
12、作为本发明所述基于无人机遥感的植被覆盖度测量方法的一种可选方案,其中:所述路径差系数代表无人机在飞行实际路径与预计距离的差值系数;
13、所述拍照差值系数代表无人机在进行拍照时所产生的成像差值系数;
14、所述大气干扰系数代表无人机在飞行过程中受到的大气数据干扰系数;
15、所述光照干扰系数代表无人机在飞行过程中因为光照对成像造成干扰系数。
16、作为本发明所述基于无人机遥感的植被覆盖度测量方法的一种可选方案,其中:所述第一数据组包括无人机的平移能力系数、旋转能力系数以及拍照缩放清晰度系数;
17、所述第二数据组包括风力强度系数、气压强度系数、光照强度系数以及大气散射系数。
18、作为本发明所述基于无人机遥感的植被覆盖度测量方法的一种可选方案,其中:所述s3步骤中拍照差值系数通过以下公式计算获取:
19、;
20、式中为第一数据中的无人机的平移能力系数,为第一数据中的无人机旋转能力系数,为第一数据中的拍照缩放清晰度系数;
21、式中为第二数据中的光照强度系数,为第二数据中的大气散射系数;
22、和分别为与其进行乘积运算的数据的权重值,分别代表其在计算中所占的比重,并且,且,和的值由客户自行选取设置。
23、作为本发明所述基于无人机遥感的植被覆盖度测量方法的一种可选方案,其中:所述飞行阻力系数和转向阻力系数分别通过以下公式计算获取:
24、;
25、;
26、式中为第一数据中的无人机的平移能力系数,为第一数据中的无人机旋转能力系数,为第二数据中的风力强度系数,为第二数据中的气压强度系数。
27、作为本发明所述基于无人机遥感的植被覆盖度测量方法的一种可选方案,其中:所述s3步骤中拍照差值系数通过以下公式计算获取:
28、;
29、式中为第一数据中的无人机的平移能力系数,为第一数据中的无人机旋转能力系数,为第一数据中的拍照缩放清晰度系数;
30、式中为第二数据中的,为第二数据中的;
31、和分别为与其进行乘积运算的数据的权重值,分别代表其在计算中所占的比重,并且,且,和的值由客户自行选取设置。
32、作为本发明所述基于无人机遥感的植被覆盖度测量方法的一种可选方案,其中:所述s3步骤中大气干扰系数通过下述公式计算获取:
33、;
34、式中为第二数据中的风力强度系数,为风力强度系数的权重值,为第二数据中的气压强度系数,为气压强度系数的权重值;
35、式中,且,和的值由客户自行选取设置;
36、所述s3步骤中的光照干扰系数通过下述公式计算获取:
37、;
38、式中为第二数据组中的光照强度系数,为第二数据组中的大气散射系数。
39、作为本发明所述基于无人机遥感的植被覆盖度测量方法的一种可选方案,其中:所述s6步骤中差值通过下述公式计算获取:
40、;
41、式中为无人机遥感检测后获取的检测值,为计算获取的残差系数。
42、作为本发明所述基于无人机遥感的植被覆盖度测量方法的一种可选方案,其中:所述评估标准包括第一阙值和第一阈值,具体评估方式如下:
43、当差值第一阙值时,代表无人机遥感检测结果误差值低;
44、当差值第一阈值时,代表无人机遥感检测结果误差值适中;
45、当差值第一阈值时,代表无人机遥感检测结果误差值高。
46、本发明还提供一种基于无人机遥感的植被覆盖度测量系统,包括上述说明书中所提及的基于无人机遥感的植被覆盖度测量方法,其中:包括以下模块:
47、区域划分模块, 负责对测量区域进行网格划分,确定地面控制点;
48、采集模块,对预定的地面控制点进行预飞行,获取无人机相关数据组成的第一数据组和测量区域的气象相关数据组成的第二数据组,通过正常飞行获取检测值;
49、计算模块,将第一数据组和第二数据组的数据进行结合和计算,得出残差系数,并根据需要,重复执行预飞行、数据获取和残差系数计算步骤,以提高残差系数的精准性;
50、对比模块,将检测值与残差系数结合,进行综合计算,得出测量结果,将结果与校准基本值进行比较,根据预设的评估标准判断结果的合理性。
51、本发明具备以下有益效果:
52、1、该基于无人机遥感的植被覆盖度测量方法,通过网格划分和地面控制点确定,无人机预飞行获取多源数据,从而提高测量精度,残差系数的计算将路径差、拍照差、大气干扰、光照干扰纳入考虑,权衡不同因素,获得准确的残差系数,此外,对飞行阻力和转向阻力的考量使得飞行过程更贴近实际,进一步提升结果可靠性,修正系数的引入能够避免极端结果的出现,增强了方法的稳定性,重复计算步骤进一步提高了残差系数的精准性,为系统整体可靠性提供了保障,评估标准的设定能够快速判断结果合理性,进一步增强了方法的可靠性。
53、2、该基于无人机遥感的植被覆盖度测量方法,数据采集过程自动化,利用无人机技术可以快速覆盖大面积区域,遥感数据获取高效迅速,通过对多源数据的计算和综合,一次飞行即可获得较为准确的测量结果,提高了测量的效率,各因素的权重可由用户自行设定,根据不同需求进行调整,使方法适应多样化的应用场景,重复计算步骤进一步提高精准性的同时,也不会明显增加整体测量时间,实现了高效的数据处理流程,整体而言,这种基于无人机遥感的植被覆盖度测量方法在可靠性和高效性方面都呈现出显著的优势。
- 还没有人留言评论。精彩留言会获得点赞!