一种无人机遥感数据多维融合方法、装置和介质与流程
本技术涉及遥感图像融合领域,尤其是涉及一种无人机遥感数据多维融合方法。
背景技术:
1、随着uav(无人驾驶飞机,unmanned aerial vehicle)硬件和高光谱传感设备的发展,无人机双高影像为农业、林业的精细化管理带来了更为细致的遥感数据,其携带的光谱和空间信息相较于传统卫片数据实现了跨越式的增长,而无人机的灵活性有为数据采集提供了时间维度的可定制性,所以从时间、空间、光谱三个维度上,无人机低空遥感数据为更多的数据处理与应用提供了大量的可能性。
2、目前在遥感技术领域,影像融合技术已经取得了巨大的进步,目前已经有许多不同的方法可供选择。其中,四类主要是成分替换类、多分辨率分析类、模型优化类和学习类。主流的影像融合方法是针对全色与多光谱等卫片影像数据,还没有针对无人机采集的正射影像数据与高光谱影像数据的融合算法。
3、因此,如何将无人机采集的影像数据根据需求不同维度、精确地融合在一起且规避无人机消费级传感器带来的精度影响,从而提高遥感数据融合的精确性、全面性,是亟需解决的问题。
技术实现思路
1、本技术提供了一种无人机遥感数据多维融合方法、装置和介质,可以将无人机采集的影像数据根据需求不同维度、精确地融合在一起,且规避无人机消费级传感器带来的精度影响,实现了遥感数据的空谱融合、时空谱融合,并针对无人机高分影像数据存在的色调差异明显问题优化了融合方法,提高了遥感数据融合的精确性、全面性。
2、为了实现上述目的,本发明采用了如下技术方案:
3、第一方面,本发明提供一种无人机遥感数据多维融合方法,所述方法包括:
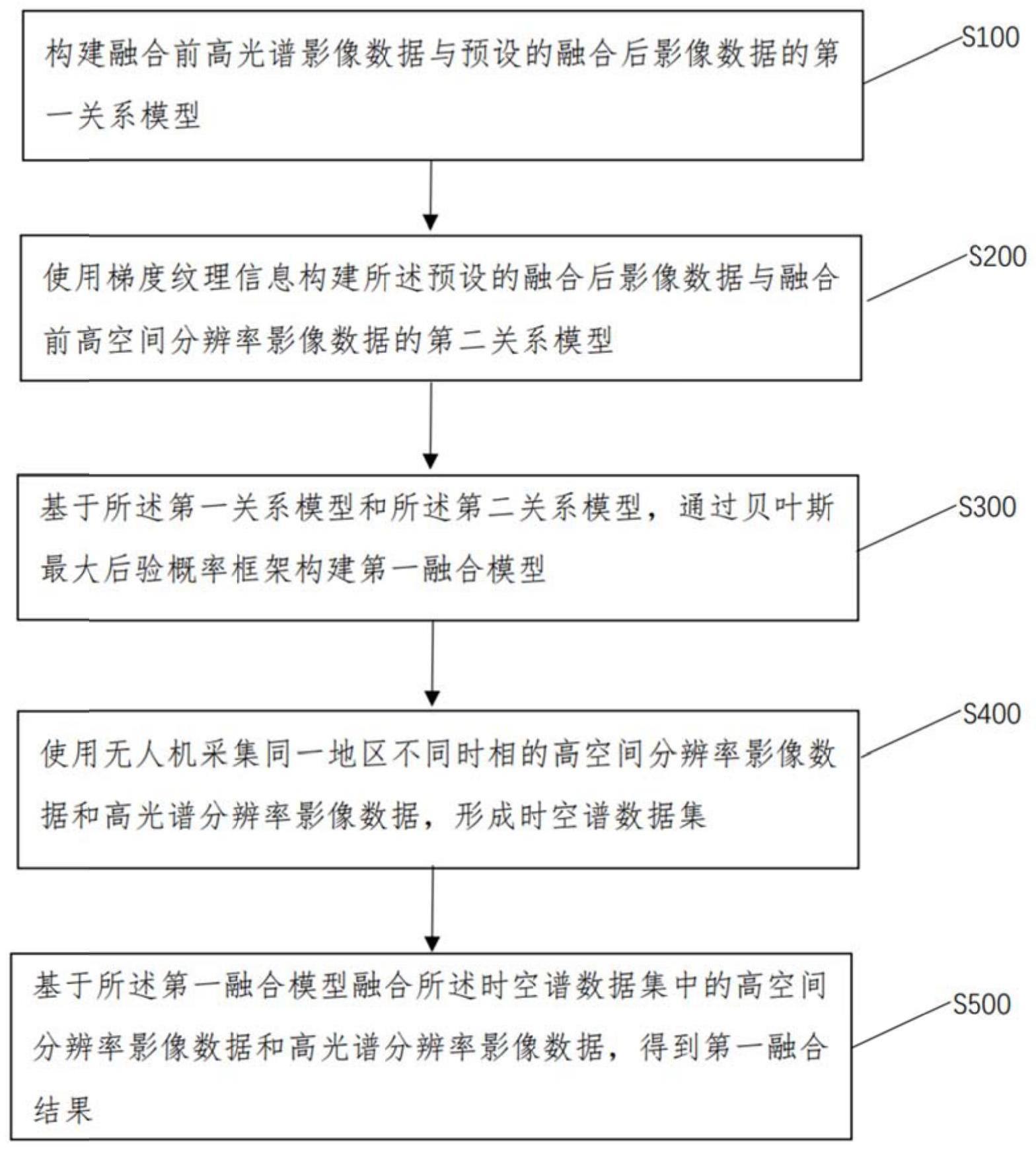
4、构建融合前高光谱影像数据与预设的融合后影像数据的第一关系模型;
5、使用梯度纹理信息构建所述预设的融合后影像数据与融合前高空间分辨率影像数据的第二关系模型;
6、基于所述第一关系模型和所述第二关系模型,通过贝叶斯最大后验概率框架构建第一融合模型;
7、使用无人机采集同一地区不同时相的高空间分辨率影像数据和高光谱分辨率影像数据,形成时空谱数据集;
8、基于所述第一融合模型融合所述时空谱数据集中的高空间分辨率影像数据和高光谱分辨率影像数据,得到第一融合结果。
9、在本技术一较佳的示例中可以进一步设置为,所述构建融合前高光谱影像数据与预设的融合后影像数据的第一关系模型,使用梯度纹理信息构建所述预设的融合后影像数据与融合前高空间分辨率影像数据的第二关系模型,包括:
10、设无人机融合前高光谱影像数据为y,融合前高空间分辨率影像为z,融合后影像数据为x,第b波段的融合前高光谱影像数据为:
11、
12、其中,n1、n2分别为融合前高光谱数据的像素的长、宽值,n1×n2为图像大小,b为融合前高光谱数据的光谱波段数;
13、预设第b波段的融合后影像数据为:
14、
15、其中,m1、m2分别为融合后影像数据的像素长、宽值,m1=n1×r,m2=n2×r,空间比率r为融合前高光谱影像数据的空间分辨率除以融合前高空间分辨率影像的空间分辨率;
16、所述第一关系模型为:
17、yb=dsbxb+nb;
18、其中sb为模糊矩阵,大小为(m1×m2)×(m1×m2),d为降采样矩阵,大小为(n1×n2)×(m1×m2),nb为噪声向量,大小为(n1×n2))×1;
19、假设融合前后空间结构相似,所述第二关系模型为:
20、
21、其中,为融合前高空间分辨率影像的梯度,为融合前高空间分辨率影像的梯度的标准差,为融合前高空间分辨率影像梯度的均值,为融合后影像数据的b波段的梯度,为融合后影像数据的b波段梯度的标准差,为融合后影像数据的b波段梯度的标准差的均值,为以为自变量的函数。
22、在本技术一较佳的示例中可以进一步设置为,所述第一融合模型为:
23、
24、其中,为第一融合结果,λ1和λ2为正则化模型参数,ab等于所述第一关系模型的dsb,b为总波段数,ξ为以w像素(i,j)为中心的局部像素的集合,ψ为对波段xb所有像素进行运算后的集合,ρ是huber函数,(dξ(xb(i,j)))为对局部像素ξ集合的算子运算,为xb图像在(i,j)位置四周4个像素与(i,j)本身的差值,i、j表示在图像中的坐标位置,i的取值范围为[1,m1],j的取值范围为[1,m2]。
25、在本技术一较佳的示例中可以进一步设置为,迭代求解所述第一融合模型,得到优化后的第一融合结果;
26、迭代函数为:
27、
28、其中,xb,k为b波段第k次迭代函数值,为对融合后影像的第b波段第k次迭代函数值进行求导,tb,k为迭代的步长;
29、迭代终止条件为:
30、
31、xk为所有波段的第k次迭代函数值,其中k为迭代次数,k的取值范围为[1,3000],d为迭代阈值,d的取值范围为[0,0.2]。
32、在本技术一较佳的示例中可以进一步设置为,包括:
33、构建空间降质模型;
34、构建时空谱关系模型,关联观测图像与融合图像;
35、采用最大后验概率理论框架、时空谱关系模型和影像先验模型构建第二融合模型,基于所述第二融合模型融合所述时空谱数据集中的时相、空间、光谱数据,得到第二融合结果。
36、在本技术一较佳的示例中可以进一步设置为,包括:
37、所述空间降质模型为:
38、gl,b=dsl,bmlxb+vl,b(1≤b≤bx,1≤l≤l);
39、其中,gl,b为融合前光谱影像数据的图像经过空间降质模型运算后得到的降质观测影像集合g中第l个影像的b波段,l为降质观测影像集合g中原始影像的编号,l为编号的总数,bx是波段总数,xb为融合后影像x的b波段,ml表示运动矩阵,sl,b为模糊矩阵,d为降采样矩阵,vl,b是噪声;
40、所述时空谱关系模型为:
41、zn,q=ψn,qcn,qaz,n,qx+τn,q+vn,q(1≤q≤bz,n,0≤n≤n);
42、其中ψn,q为时相关系矩阵,τn,q为残差,vn,q为噪声,az,n,q为空间尺度关系矩阵,cn,q表示光谱关系矩阵,n为影像编号,n的取值范围为[0,n],n为影像总数,q为高光谱影像波段数的计数,取值范围为[1,bzn],bzn是第n个高光谱影像总的波段数,zn,q是观测影像集合z中第n个影像的第q个波段;
43、第二融合模型为:
44、
45、
46、其中,wn,q表示zn,q对融合后影像数据x的贡献度大小,q表示三维拉普拉斯算子,cn,q为表示光谱关系矩阵,ag,l,b等于dsl,bml。
47、在本技术一较佳的示例中可以进一步设置为,包括:
48、采取共辄梯度算法优化并求解所述第二融合模型,得到优化后的第二融合结果。
49、在本技术一较佳的示例中可以进一步设置为,包括:
50、基于所述第一融合模型和第二融合模型,针对所述时空谱数据集中的影像的色调差异对融合过程进行优化。
51、第二方面,本技术提供一种无人机遥感数据多维融合装置,所述装置包括:
52、模型构建模块,用于构建融合前高光谱影像数据与预设的融合后影像数据的第一关系模型;使用梯度纹理信息构建所述预设的融合后影像数据与融合前高空间分辨率影像数据的第二关系模型;基于所述第一关系模型和所述第二关系模型,通过贝叶斯最大后验概率框架构建第一融合模型;
53、数据采集模块,用于通过无人机采集同一地区不同时相的高空间分辨率影像数据和高光谱分辨率影像数据,形成时空谱数据集;
54、融合模块,基于所述第一融合模型融合所述时空谱数据集中的高空间分辨率影像数据和高光谱分辨率影像数据,得到第一融合结果。
55、第三方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质上存储有程序,其中所述程序被处理器执行时,实现如上述任一项所述的无人机遥感数据多维融合方法。
56、综上,与现有技术相比,本技术实施例提供的技术方案带来的有益效果至少包括:
57、本技术提供的一种无人机遥感数据多维融合方法,构建融合前高光谱影像数据与预设的融合后影像数据的第一关系模型,使用梯度纹理信息构建所述预设的融合后影像数据与融合前高空间分辨率影像数据的第二关系模型,基于所述第一关系模型和所述第二关系模型,通过贝叶斯最大后验概率框架构建第一融合模型,使用无人机采集同一地区不同时相的高空间分辨率影像数据和高光谱分辨率影像数据,形成时空谱数据集,基于所述第一融合模型融合所述时空谱数据集中的所述高空间分辨率影像数据和高光谱分辨率影像数据,得到第一融合结果。本技术可以将无人机采集的高空间分辨率、高光谱分辨率精确地融合在一起,且规避无人机消费级传感器带来的精度影响,实现了遥感数据的空谱融合,提高了遥感数据融合的精确性、全面性。
- 还没有人留言评论。精彩留言会获得点赞!