基于时空信息融合的多传感器数据异常检测方法和装置
本发明涉及人工智能和计算机,具体涉及一种基于时空信息融合的多传感器数据异常检测方法和装置。
背景技术:
1、时间序列是指一连串蕴含着随时间变化而产生结果的数据,时间序列异常是指时间序列上下文中与正常模式存在差异的子序列,时间序列异常检测的任务是从正常的时间序列中识别出不正常的事件或行为,目前主流的异常检测方法大多基于深度学习展开。在实际生产环境中一一如水处理采集、土壤样本采集等,由于存在多个传感器,时序数据包含多个维度的特征,因此目前的深度学习方法主要研究多元时间序列异常检测。
2、由于获取异常标签成本过高,异常检测大多采用无监督学习方式。无监督深度异常检测技术通过学习数据的内在特性来检测异常值,这类方法可以分为基于预测的异常检测方法和基于重构的异常检测方法两种。基于预测的异常检测方法通过预测值和真实值获取预测误差,当预测误差大于选定的阈值时,将其视为异常,反之视为正常,常见的基于rnn的异常检测方法大多基于此方式预测异常。但是,受限于多维时间序列的复杂周期以及易受扰动的特点,基于预测的异常检测方法误报率偏高。基于重构的异常检测算法通过重构误差来判断异常,自编码器ae是异常检测中最常见的重构模型。自编码是一个对数据进行编码-解码的神经网络模型,通过一个编码-解码的重构操作来学习正常数据的特征分布,以此来检测数据中的异常。另一种常用的重构模型基于生成式对抗网络gan,gan包含一个鉴别器和生成器,生成器生成接近原始数据的重构数据,而鉴别器则需要尽可能区分原始数据和生成数据,两个网络相互学习。基于重构的异常检测方法由于学习正常时间序列的潜在分布,通过计算测试数据的重构值与真实值的误差来判断异常,因此表现出更强的鲁棒性,本发明选择基于重构的方法进行异常检测。
3、早期的多元时间序列异常检测方法侧重于从时间依赖关系进行特征提取,近年来,随着新颖深度神经网络的提出,基于时空特征依赖关系的异常检测研究工作相继展开,这些工作主要围绕级联和并联两种方式进行时空特征提取。并联提取方法通常使用两个特征提取模块分别捕获时间依赖和空间依赖,并使用全连接层拼接时空特征。级联提取方法通过堆叠时空特征提取模块实现两类依赖关系的捕获。在实际生产环境中,由于传感器的监测指标互相关联—一例如临近区域的土壤含水量高度相关,对应的传感器数据也随时间变化在某一特定时空内呈现出相关的变化模式。因此除时间相关性和空间相关性外,多传感器时间序列数据还具备时空交互特征,它表示时间和空间之间存在的对应关系,捕捉这类依赖关系对学习时序数据有重要意义。然而上述两类方法均未主动构建时空交互特征,忽略了时空交互特征在时序数据中起到的重要作用。
技术实现思路
1、本发明的目的是为了提出一种基于时空信息融合的多传感器数据异常检测方法和装置,充分考虑了时间和空间信息之间的相互作用,通过两组并行的编码器和解码器构建时空交互特征,通过交互注意力机制捕获时空间依赖,实现了跨特征交互的时空融合,提升了传感器数据异常检测的准确性。
2、为实现上述技术目的,本发明采取的技术方案为:
3、一种基于时空信息融合的多传感器数据异常检测方法,所述多传感器数据异常检测方法包括以下步骤:
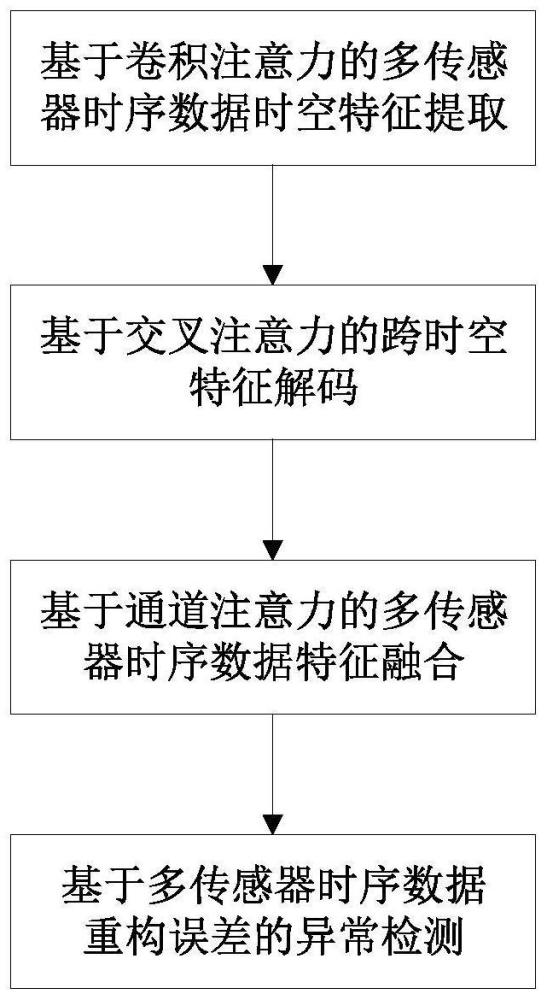
4、步骤s1:采用多尺度卷积注意力对多传感器时序数据进行时空特征提取;
5、步骤s2:使用交叉注意力关联互补特征的特征矩阵以对多传感器时序数据的时空特征进行深度融合;
6、步骤s3:利用通道注意力从传感器角度聚合时空交互特征,通过全连接层为时空交互特征构建注意力权重;
7、步骤s4:重构多传感器时序数据,通过计算重构的多传感器时序数据和真实的多传感器时序数据之间的误差,判断多传感器时序数据中是否包含异常数据。
8、进一步地,步骤s1中,采用多尺度卷积注意力对多传感器时序数据进行时空特征提取的过程包括以下步骤:使用不同尺度的卷积核捕获多传感器数据的全局和局部时间相关性,并通过标准的逐点注意力获取不同传感器之间的相关性。
9、进一步地,步骤s1中,采用多尺度卷积注意力对多传感器时序数据进行时空特征提取的过程包括以下步骤:
10、步骤s11:将由同一实体内的多个单变量时间序列组成的多个传感器的时序数据表示为x={x1,x2,...,xn},其中,n表示时间戳的最大长度,xt∈rd表示一个d维的向量,表示时序数据中t时刻的值,d表示传感器维度大小,t=1,2,...,n;利用滑动窗口划分时间序列,将多维时间序列x划分为多个滑动窗口;
11、步骤s12:时间编码器采用因果卷积计算查询矩阵、键矩阵和值矩阵,设置不同大小的卷积核学习传感器数据的局部上下文,并通过高效注意力在序列级别捕捉特征的依赖关系:
12、
13、vt=ffn(v′t)
14、其中,v′t表示卷积注意力的计算结果,conv_attention表示卷积注意力操作,包含因果卷积和有效注意力两部分,fo表示全连接层,concat表示拼接操作,表示h组不同的得到时间编码的注意力输出,是得到时间编码的第h个注意力结果,h=1,2,...,h,是经过权重矩阵计算得到的时间编码的查询矩阵、键矩阵和值矩阵,ρq和ρk均为softmax归一化函数;xt表示时序数据x在第t个时间窗的值,vt表示时间编码器的计算结果,ffn表示前馈网络;
15、步骤s13:空间编码器设置卷积核大小为1,使用标准的线性映射逐点学习传感器之间的相关性:
16、
17、vs=ffn(v′s)
18、其中,v′s表示卷积注意力的计算结果,conv_attention表示卷积注意力操作,表示h组不同的得到空间编码的注意力输出,是得到空间编码的第h个注意力结果,是经过权重矩阵计算得到的空间编码的查询矩阵、键矩阵和值矩阵;表示时序数据x在t时刻值的转置,用于计算传感器之间的相关性,vs表示空间编码器的计算结果,ffn表示前馈网络。
19、进一步地,步骤s2中,采用时间解码器和空间解码器,使用交叉注意力关联互补特征的特征矩阵对多传感器时序数据的时空信息进行深度融合,融合过程包括两个阶段,第一阶段包含卷积注意力和交叉注意力两部分操作,卷积注意力分别提取前一时间窗的时空特征,通过交叉注意力初步融合时空特征,第二阶段包含两个交叉注意力操作,分别聚合上一阶段的时空编码特征,以及互补地解码时空特征,对时序数据的时空信息做进一步融合。
20、进一步地,步骤s2中,使用交叉注意力关联互补特征的特征矩阵以对多传感器时序数据的时空特征进行深度融合的过程包括以下步骤:时间解码器的输入包括前一个时间窗和步骤s1得到的时间编码特征两部分,在第一阶段,通过卷积注意力和交叉注意力捕获前一个时间戳的时空信息,初步提取时空交互特征,在第二阶段,使用交叉注意力融合步骤s1得到的时间编码特征以及初步提取的时空交互特征,进一步构建时空交互特征;时间解码器的两阶段融合的计算公式如下:
21、
22、
23、其中,表示时间解码器的第一阶段输出,xt-1表示前一个时间窗的时序数据,表示第一阶段的卷积注意力输出,表示第一阶段的交叉注意力输出,concat表示拼接操作,fo表示全连接网络,表示时间解码器的第二阶段输出,和分别表示第二阶段的两个交叉注意力输出;
24、空间解码器的输入包含前一个时间窗和步骤s1得到的空间编码特征两部分,独立解码空间特征的同时,互补地获取时间解码特征,空间解码器的两阶段融合的计算公式如下:
25、
26、
27、其中,表示时间解码器的第一阶段输出,表示前一个时间窗的时序数据的转置,表示第一阶段的卷积注意力输出,表示第一阶段的交叉注意力输出,concat表示拼接操作,fo表示全连接网络,表示时间解码器的第二阶段输出,和分别表示第二阶段的两个交叉注意力输出。
28、进一步地,步骤s3中,利用通道注意力从传感器角度聚合时空交互特征,通过全连接层为时空交互特征构建注意力权重是指通过对合并后的时空解码特征进行基于传感器维度的权重分配,对时空交互特征之间进行深度融合,包括以下步骤:
29、s31:将全局信息从时间维度上压缩成一个通道描述符,通过输出数据中每个通道的信号,使网络更聚焦于特征依赖性的提取:
30、zj=fsq(xj)
31、其中,zj表示压缩后嵌入表示的第j个元素,j∈{1,...,d},fsq表示压缩操作,xj表示合并时空解码特征vi的第j个特征的向量;
32、s32:通过两个全连接层获取不同传感器特征的注意力权重,基于该权重调节特征向量的变换得到加权特征:
33、s=fex(z,fo)
34、(f′)j=sj·xj
35、其中,s表示不同特征权重的注意力向量,fex表示激励操作,z表示压缩压缩后的嵌入表示,fo包含两个全连接层操作,(f′)j是经过注意力权重变换后加权特征的第j个向量,j∈{1,...,d},sj是注意力向量的第j个元素,xj表示合并时空解码特征vi的第j个特征的向量;
36、s33:通过残差网络拼接合并后的初始时空解码特征vi,得到基于通道注意力的多传感器时序数据特征融合阶段的输出。
37、进一步地,步骤s4中,重构多传感器时序数据,通过计算重构的多传感器时序数据和真实的多传感器时序数据之间的误差,判断多传感器时序数据中是否包含异常数据的过程包括以下步骤:
38、采用下述公式计算多传感器时序数据的每个时空交互特征的重构值和实际值的误差,并获取d个时空交互特征的平均值,将其作为当前时间戳的异常得分:
39、
40、其中,score表示计算得出的异常得分,d表示时空交互特征数量,xj表示第j个时空交互特征的实际值,表示第j个时空交互特征的重构值,是实际值xj和重构值之间的均方根误差,表示第j个时空交互特征的实际值和重构之间的偏差程度。本发明还公开了一种基于时空信息融合的多传感器数据异常检测装置,所述多传感器数据异常检测装置包括多尺度卷积注意力时空特征提取模块、交叉注意力跨时空特征解码模块、通道注意力时空特征融合模块和时序数据异常检测模块;
41、所述多尺度卷积注意力时空特征提取模块用于采用多尺度卷积注意力对多传感器时序数据进行时空特征提取;
42、所述交叉注意力跨时空特征解码模块用于使用交叉注意力关联互补特征的特征矩阵以对多传感器时序数据的时空特征进行深度融合;
43、所述通道注意力时空特征融合模块用于利用通道注意力从传感器角度聚合时空交互特征,通过全连接层为时空交互特征构建注意力权重;
44、所述异常检测模块利用模型用于重构多传感器时序数据,通过计算重构的多传感器时序数据和真实的多传感器时序数据之间的误差,判断多传感器时序数据中是否包含异常数据。
45、本发明还公开了一种计算机可读存储介质,所述的计算机可读存储介质存储有计算机程序,所述的计算机程序被处理器执行时,实现如前所述的方法步骤。
46、本发明还公开了一种电子设备,所述的电子设备包括处理器以及存储器,所述的存储器存储有计算机程序,所述的计算机程序被所述的处理器执行时,实现如前所述的方法步骤。
47、与现有技术相比,本发明的有益效果如下:
48、第一,本发明的基于时空信息融合的多传感器数据异常检测方法和装置,充分考虑了时间和空间信息之间的相互作用,通过两组并行的编码器和解码器构建时空交互特征,通过交互注意力机制捕获时空间依赖,实现了跨特征交互的时空融合。
49、第二,本发明的基于时空信息融合的多传感器数据异常检测方法和装置,采用多尺度卷积注意力机制来有效捕捉局部上下文信息,同时保留全局特征提取的能力,实现了更有效地提取时序特征。
50、第三,本发明的基于时空信息融合的多传感器数据异常检测方法和装置,采用通道注意力机制从特征维度分配注意力权重,增强时空特征的融合效果,通过保留低频信息的方式提升了模型的抗噪性。
- 还没有人留言评论。精彩留言会获得点赞!