面向路网多中心交通等时线的等时特征值估计方法
本发明涉及城市道路路网时效性能评估与分析的,尤其是指一种面向路网多中心交通等时线的等时特征值估计方法。
背景技术:
1、交通等时线是指根据出行耗费的行程时间绘制而成的范围线,能够借助二维平面直观反映行程时间在空间上的分布,从宏观角度反映一个路网的交通便捷程度。等时特征值的计算是生成交通等时线的基础,其本质是在确定的交通条件和确定的路网道路条件下,从确定的交通发生点出发到离散点的最短行程时间值。
2、目前,计算最短行程时间,即等时特征值的方法主要是利用dijskra算法估计获得,但单纯使用dijskra算法并没有充分考虑行程时间与道路网络结构的潜在联系,并且目前的大多数研究都是以单中心交通等时线为研究对象,集中在单中心等时特征值的求取上。在实际生活中,人们常常需要了解“到达某一类设施需要多长时间”的问题,而这种情况下,单中心等时线很难提供令人满意的答案。相比于单中心等时线,多中心等时线可以更好地描述路网中某一类设施的时效空间分布,而求取多中心等时特征值是绘制多中心等时线的基础。
3、本发明提出的等时特征值估计方法综合考虑上述问题,面向多中心交通等时线,基于dijskra算法,使用考虑行程方向的等时特征值估计策略计算多中心等时特征值。
技术实现思路
1、本发明的目的在于克服现有技术的缺点与不足,提出了一种考虑交通状态的面向路网多中心交通等时线的等时特征值估计方法,突破已有方法中数据需求高、难以加载到不同交通状态等限制,在拓扑路网中添加路段及交叉口的交通阻抗,以建立可动态加载交通状态、所需的实际路网运行数据少、可以分析不同场景下路网的时效性能变化的等时特征值估计方法。
2、为实现上述目的,本发明所提供的技术方案为:面向路网多中心交通等时线的等时特征值估计方法,包括以下步骤:
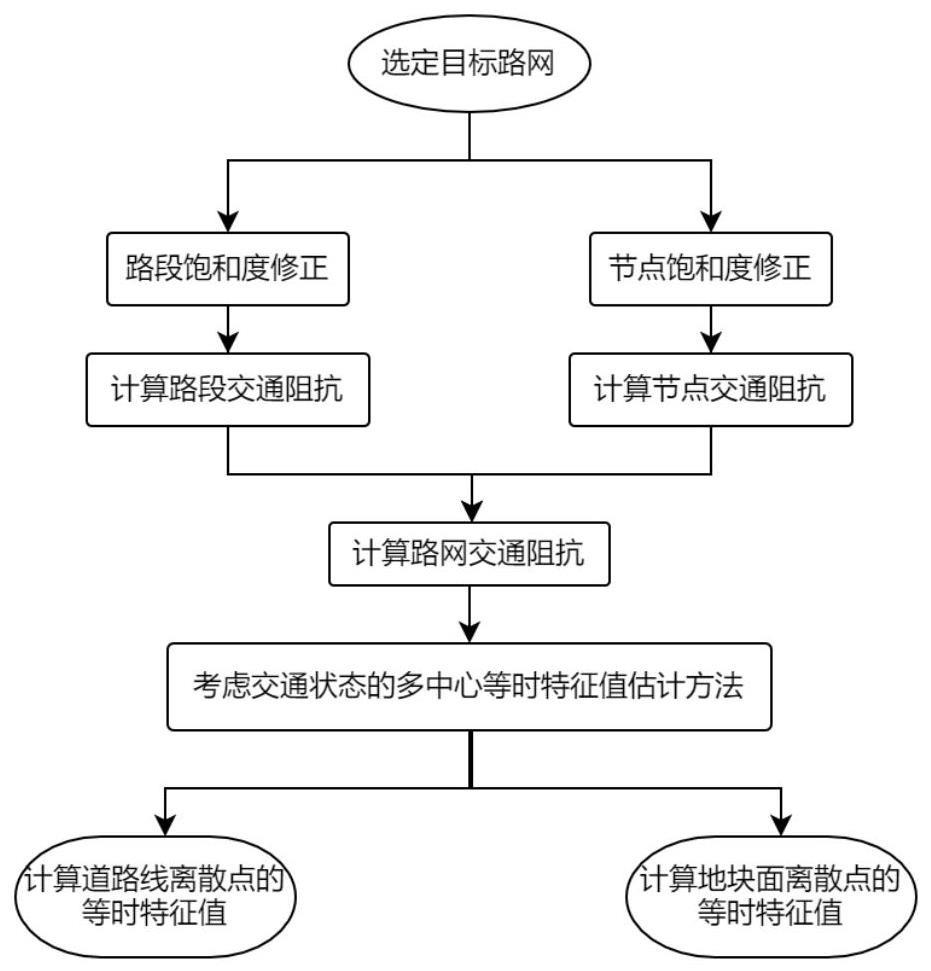
3、1)选定目标路网,将目标路网中的城市道路路段抽象为边,交叉口抽象为节点,获得城市道路网络的拓扑结构;
4、2)针对选定的目标路网,根据道路等级和车道数对路网中的路段进行饱和度修正,根据节点饱和度修正规则对路网中的节点进行饱和度修正,得到修正后的路段饱和度和节点饱和度;
5、3)利用修正后的路段饱和度,基于bpr模型计算所有路段的交通阻抗;将路网中的所有节点根据节点的邻接道路等级、邻接结构分成1类节点和2类节点,利用修正后的节点饱和度,分别计算1类节点和2类节点的交通阻抗;利用计算得到的所有路段交通阻抗和所有节点交通阻抗计算路网交通阻抗;
6、4)依据路网中离散点所处的空间位置的不同,将其分为道路线离散点和地块面离散点,随后将计算得到的路网交通阻抗值设为dijkstra算法中的权重值,使用考虑行程方向的多中心等时特征值估计策略,估计多中心点与道路线离散点和地块面离散点的最小的最短行程时间,该最小的最短行程时间即为针对路网多中心交通等时线的等时特征值。
7、进一步,在步骤1)中,通过邻接矩阵来刻画节点之间的关系。
8、进一步,在步骤2)中,分别对路段和节点进行饱和度修正,具体如下:
9、a、根据道路等级和车道数来修正路段饱和度,修正后的路段j,即边ej的饱和度表示为:
10、
11、式中,为路段j的饱和度;为路网平均饱和度;γ为饱和度修正的阈值,根据路网实际情况确定;ε为模拟交通拥堵状态下的波动误差,服从期望为0,方差为σ的正态分布;f为饱和度的修正函数,highway为道路等级,n为车道数;
12、b、估计节点饱和度:假设上游路段的流量全部进入节点,节点左转、直行、右转的比例为不考虑其它转向情况,并且节点进口道功能车道与转向比例匹配;
13、基于上述假设,节点v某进口i各转向的饱和度表示为:
14、
15、式中,和分别表示i进口左转、直行和右转的饱和度;nui和分别为i进口邻接路段的车道数和路段饱和度;表示各个转向的流量比例;表示各转向的转向车道数,分别表示左转、直行和右转的转向车道数;
16、最后,节点饱和度取节点各转向的饱和度的最大值。
17、进一步,在步骤3)中,计算路段交通阻抗和节点交通阻抗,进而计算路网交通阻抗,包括以下步骤:
18、3.1)计算路段交通阻抗,对brp模型的参数进行重新标定,按照如下公式计算边ej对应的路段j的路段交通阻抗
19、
20、式中,lj为路段j的长度;分别为快速路、主干路、次干路、支路的自由流行驶速度,不同的道路等级对应的自由流速度不一,需要分别标定;α1、β1、α2、β2、α3、β3、α4、β4为待标定的公式参数,通过总结已有的不同城市的bpr模型标定结果发现,不同城市相同道路等级的bpr模型标定参数区别不大,因此能够使用已有的不同道路等级的参数标定值;
21、3.2)计算节点交通阻抗,根据节点的邻接道路等级、邻接结构对节点进行分类,1类节点为信号控制交叉口,2类节点为无信号控制交叉口;
22、基于webster模型和alicksik模型,计算1类节点的交通阻抗值,假设信号控制交叉口均实施单口放行,则对于信号控制交叉口,节点v的节点交通阻抗td表示为:
23、
24、
25、式中,tid为节点v不同进口的交通阻抗;ct为信号周期;λi、为i进口的绿信比、饱和度;γ2为饱和度阈值,为低饱和度与高饱和度的分界值;qi为平均过饱和排队长度;为节点v所有进口阻抗的平均值;
26、2类节点阻抗采用无信号交叉口的固定延误来计算,当交叉口处于畅通状态,设定其延误为20秒,当交叉口处于拥堵状态,设定其延误为30秒;
27、3.3)计算路网交通阻抗,城市道路交通阻抗反映了路段和节点对于交通负荷的反应,利用下式计算城市道路路网交通阻抗t:
28、
29、进一步,在步骤4)中,将路网中的离散点进行分类,随后在考虑行程方向的情况下,计算多中心等时特征值,包括以下步骤:
30、4.1)依据路网中离散点所处的空间位置的不同,将路网中的离散点分为道路线离散点和地块面离散点;
31、道路线离散点表示沿着路网道路路段生成的离散点,全部分布在道路网络上,包括道路中的节点和路段,分别对应道路线离散点中的节点离散点和路段离散点;
32、地块面离散点为将研究路网均匀的分为许多网格,网格的几何中心处生成的离散点;将地块面离散点记为ppoly(i),网格范围内的道路线离散点记为pl(j),路段记为ej;根据地块面网格与道路线或道路线离散点之间的相交情况,对地块面离散点进行分类;
33、当地块面离散点ppoly(i)所在地块面网格与道路线离散点pl(j)以及路段ej同时相交,则将该地块面离散点ppoly(i)归类为1类面离散点;当地块面离散点ppoly(i)所在地块面网格仅与路段ej相交,则将该地块面离散点ppoly(i)归类为2类面离散点;当地块面离散点ppoly(i)所在地块面网格既不与道路线离散点pl(j)相交,也不与路段ej相交,则将该地块面离散点ppoly(i)归类为3类面离散点;
34、4.2)估计道路线离散点中节点离散点的多中心等时特征值,根据行程方向的不同,使用不同的策略计算节点离散点的多中心等时特征值;
35、若以多中心点为出发点,以某节点为目标点,则从单个中心点出发,运行一次dijkstra算法进行最短路径搜索,计算该中心点到路网上各节点的行程时间,取多中心点到达该节点的最小最短行程时间,即为该节点的多中心等时特征值;
36、若以节点作为出发点,多中心点作为目标点,只需要运行一次dijkstra算法,即可求出从该节点出发到达路网其它节点的最短路径,具体策略如下:
37、记所求得的从节点vp1出发到达中心点集合的最小最短路径上的所有节点为vp={vp1,vp2,...,vpi,...,vpn,cs},cs为中心点,则第一个节点vp1出发到达第i个节点vpi,1≤i≤n的最短路径是该最小最短路径的一部分;同样的,从节点vpi出发到达多中心点的最短路径也是该最小最短路径的一部分;
38、则该路径上所有节点到达中心点集合的最短路径是该路径的一部分,该路径上的所有节点均距离中心点cs行程最近,将vp中节点均记录为归属于中心点cs,第一个节点vp1到达该节点vpi的行程时间为t1i,第一个节点vp1到达归属中心点cs的行程时间为t1s,则vpi到归属中心点cs的最短行程时间tis=t1s-t1i;
39、4.3)估计道路线离散点中路段离散点的多中心等时特征值,路段不同行程方向的阻抗不同,针对不同的行程方向,采用不同的策略计算路段离散点的多中心等时特征值;
40、在行程方向为从多中心点出发到达路段离散点的情况下,若路段为双向通行,记状态dir=0;若路段为单向通行,记状态dir=1,路段离散点仅能经过节点vs到达;按照如下公式求取路段离散点的多中心等时特征值:
41、
42、
43、
44、
45、式中,dsp为路段离散点与节点vs之间的欧式距离;dpe为路段离散点与节点ve之间的欧式距离;lse为边ese的路段长度;为路段离散点的最短行程时间,即路段离散点的多中心等时特征值;为从归属中心点出发经节点vs到达路段离散点的行程时间;为从归属中心点出发经节点ve到达路段离散点的行程时间;为路段离散点的归属中心点;为节点vs的归属中心点;为节点ve的归属中心点;为边ese从vs到ve方向的路段阻抗;为边ees从ve到vs方向的路段阻抗;
46、在行程方向为从路段离散点出发到达多中心点的情况下,若路段为双向通行,记状态dir=0;若路段为单向通行,记状态dir=1,路段离散点仅能经过节点ve到达多中心点;采用下式计算路段离散点的多中心等时特征值:
47、
48、
49、
50、
51、式中,dsp为路段离散点与节点vs之间的欧式距离;dpe为路段离散点与节点ve之间的欧式距离;lse为边ese的路段长度;为路段离散点的最短行程时间,即路段离散点的多中心等时特征值;为从路段离散点出发经过节点vs到达归属中心点的行程时间;为从路段离散点出发经节点ve到达归属中心点的行程时间;为路段离散点的归属中心点;为节点vs的归属中心点;为节点ve的归属中心点;为边ese从vs到ve方向的路段阻抗;为边ees从ve到vs方向的路段阻抗;
52、4.4)估计地块面离散点的多中心等时特征值,由于1类面离散点所在地块面网格含有其它包含更多地理信息和交通信息的路段线离散点,地块面网格内的路段线离散点已满足1类面离散点所属网格的插值需求,因此,剔除1类面离散点,随后,根据下式计算并输出2类和3类面离散点特征值;
53、
54、
55、式中,p(i)为2、3类面离散点,tp(i)为地块面离散点对应的多中心等时特征值,为道路线离散点对应的多中心等时特征值,pl_n为与地块面离散点欧式距离最近的道路线离散点,distance为两点之间的距离,vp为面地块的交通蔓延速度,cp(i)表示地块面离散点对应的归属中心点,为道路线离散点pl_n的归属中心点,ξ为随机误差;
56、4.5)输出路网中所有道路线离散点和地块面离散点的等时特征值。
57、本发明与现有技术相比,具有如下优点与有益效果:
58、1、允许加载不同的交通状态,能够模拟实际路网的各种运行状态。
59、2、能充分考虑道路等级、道路拓扑结构对交通状态分布不均衡性的影响。
60、3、不需要实际运行流量数据和信号控制数据,能够通过道路等级、道路结构及路网饱和度估计路段交通阻抗和节点交通阻抗。
61、4、采用考虑行程方向的多中心等时特征值估计策略,减少了特征值估计过程的计算量。
- 还没有人留言评论。精彩留言会获得点赞!