基于相位恢复的芯片掩模版瑕疵检测方法与流程
本发明属于半导体检测的,涉及基于相位恢复的芯片掩模版瑕疵检测方法。
背景技术:
1、在半导体制造过程中,掩模版是极其关键的组成部分。掩模版实际上是一种用于光刻的模板,有助于在半导体晶圆上创建集成电路的复杂模式。一张掩模版通常由透明的基板制成,基板上覆盖有一层模式化的镀铬材料,镀铬材料的模式对应于晶圆上的电路模式。在光刻过程中,掩模版被放置在晶圆和光源之间。光线通过透明的部分照射到晶圆上,而被镀铬材料部分阻挡。每一张掩模版对应于晶圆制程中的一步,通常需要一套掩模版来创建一个完整的集成电路。因此,掩模版的设计和制造是整个半导体制造过程中非常关键的一步。掩膜版的质量、精度和准确性直接影响到最终产出的集成电路的性能和可靠性。
2、掩模版的瑕疵可能导致严重的问题,掩膜版的瑕疵可以归类为几种基本类型:
3、颗粒瑕疵:这是最常见的瑕疵类型,通常由镀铬层上的尘粒或其他杂质引起。这些颗粒可能阻挡光线的通过,导致晶圆上的电路模式出现问题。
4、缺陷瑕疵:这种瑕疵是由于在制造过程中,掩模版上的某个区域未能正确的覆盖或者去除镀铬层。这可能导致电路图案的不完整或者额外的图案。
5、划痕和裂纹:这种瑕疵通常是由于处理或存储掩模版时不慎引起的。划痕和裂纹可能改变光线的传播路径,从而导致模式传输的失真。
6、无论是哪种类型的掩膜版瑕疵,都可能导致严重的问题,因此在制造和使用掩模版时需要采取严格的质量控制措施。其中一项关键的步骤就是掩模版的检验,通过高分辨率的成像系统和自动化的检测算法来寻找并标记出可能的瑕疵。
7、但是,由于掩模版是透明玻璃,光线经过透明和半透明基体的光波信息很难被光学显微镜直接探测。这就造成直接采用成像系统拍摄掩膜版时得到的图像的对比度、清晰度不足,难以准确识别掩膜版上的瑕疵,同时也能以对瑕疵的深度进行准确的检测。
8、因此,针对现有技术中对掩膜版上的瑕疵进行检测时存在的成像对比度、清晰度不足导致难以精确识别瑕疵,以及难以准确检测瑕疵的深度的缺陷,本发明公开了基于相位恢复的芯片掩模版瑕疵检测方法。
技术实现思路
1、本发明的目的在于提供基于相位恢复的芯片掩模版瑕疵检测方法,使用不同拍摄角度对掩膜版进行拍摄成像,通过恢复掩膜版上瑕疵目标的光学相位来增强图像以提高成像的对比度与清晰度,进而保证准确检出瑕疵,同时通过恢复的光学相位准确检测瑕疵的深度。
2、本发明通过下述技术方案实现:
3、基于相位恢复的芯片掩模版瑕疵检测方法,通过拍摄相机在同一平面内的不同角度位置拍摄掩膜版得到不同角度的拍摄图像,对拍摄图像进行傅里叶变换以将拍摄图像从空域转换至频域,并将不同角度的拍摄图像在频域中的频谱叠加合并,对叠加合并后的频谱进行傅里叶逆变换以将拍摄图像从频域转换至空域;对拍摄图像在空域与频与之间进行往返迭代与约束,实现对拍摄图像的相位信息的增补复原,并根据增补复原后相位信息增强拍摄图像的强度以准确识别瑕疵,根据增补复原后相位信息解算瑕疵的深度。
4、本发明利用光的波动性,当光从不同的角度照射到掩膜版上,光会以不同的方式反射和折射。通过从不同的角度拍摄掩膜版得到不同角度的拍摄图像,通过对不同角度的拍摄图像进行空域与频域之间的往复迭代处理,即可增补复原出相位信息,进而通过相位信息可以对掩膜版拍摄图像进行增强以提高其分辨率,进而能够更加准确的识别掩膜版上的瑕疵。同时,由于光经过瑕疵时会发生相位的偏移,因此通过增补复原后的相位信息能够得到光经过具有瑕疵的掩膜版与光经过没有瑕疵的掩膜版上同一位置的相位差,进而通过相位差即可解算出瑕疵的深度。
5、从而实现对掩模版上瑕疵目标的增强和深度测量
6、为了更好地实现本发明,进一步的,具体包括以下步骤:
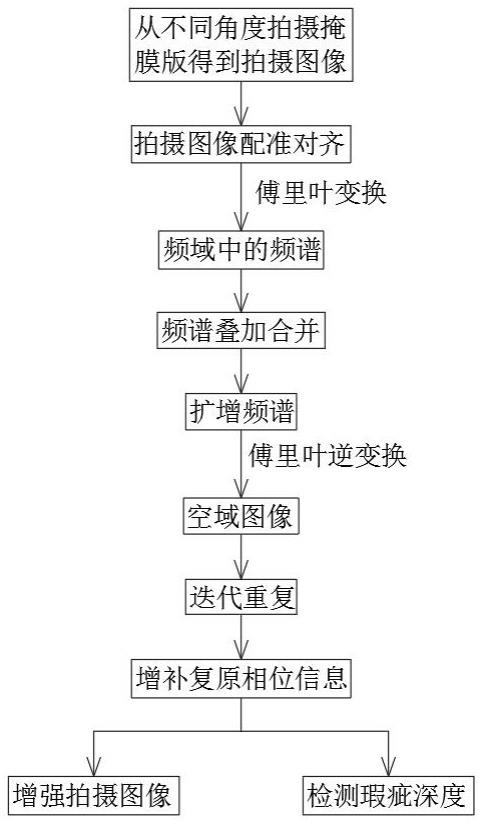
7、步骤1、采用拍摄相机在同一平面内位于拍摄轴线与铅锤线呈不同角度的若干位置拍摄掩膜版得到掩膜版不同角度的拍摄图像;
8、步骤2、对不同角度的拍摄图像进行对齐处理,然后计算对齐后的拍摄图像之间的图像差异以得到图像复原相位初始值;
9、步骤3、对拍摄图像进行傅里叶变换,以将拍摄图像从空域转换至频域,然后在频域中对不同角度的拍摄图像的频谱进行叠加合并得到扩增频谱;
10、步骤4、对步骤3中得到的扩增频谱进行逆傅里叶变换;
11、步骤5、基于图像复原相位初始值重复迭代上述步骤2-步骤4,直到增补复原拍摄图像在整个频域上的相位信息;
12、步骤6、利用增补复原的相位信息增强拍摄图像的强度以准确识别瑕疵,利用增补复原的相位信息计算瑕疵的深度。
13、为了更好地实现本发明,进一步的,所述步骤3具体包括:
14、步骤3.1、对不同角度的拍摄图像进行傅里叶变换以得到当前拍摄图像的频谱图像;
15、步骤3.2、对频谱图像进行去噪处理;
16、步骤3.3、在频谱图像的中心处提取中心部分;
17、步骤3.4、将频谱图像的中心部分叠加合并得到扩增频谱。
18、为了更好地实现本发明,进一步的,所述步骤3.3具体包括:
19、步骤3.3.1、以拍摄相机的拍摄轴线与铅锤线之间的夹角为0°的位置拍摄得到的拍摄图像作为初始图像,对初始图像进行傅里叶变换以得到初始图像在频域中的初始频谱图像;步骤3.3.2、提取初始频谱图像中心处的中心部分;
20、步骤3.3.3、逐渐增大摄相机的拍摄轴线与铅锤线之间的夹角进行拍摄以得到若干后续图像,对后续图像进行傅里叶变换以得到后续图像在频域中的后续频谱图像;
21、步骤3.3.4、按照拍摄轴线与铅锤线之间的夹角越大提取范围越大的规则,提取后续频谱图像中心处的中心部分。
22、为了更好地实现本发明,进一步的,所述步骤6中利用增补复原的相位信息计算瑕疵的深度具体包括:
23、步骤a、提取瑕疵所在位置的瑕疵相位;
24、步骤b、计算掩膜版上同一位置不存在瑕疵时的理想相位;
25、步骤c、计算瑕疵相位与理想相位之间的相位差;
26、步骤d、根据相位差解算光线经过当前位置的光程差,光程差即为瑕疵深度。
27、为了更好地实现本发明,进一步的,所述步骤2具体包括:
28、步骤2.1、从不同角度的拍摄图像中提取特征点,并生成用于表示特征点的特征信息的描述子;
29、步骤2.2、比较不同角度的拍摄图像中特征点的描述子,以得到不同角度的拍摄图像中相似的特征点对;
30、步骤2.3、通过对比特征点对以解算出不同角度的拍摄图像之间的变换模型,利用变换模型将不同角度的拍摄图像进行对齐处理;
31、为了更好地实现本发明,进一步的,采用sift算法从拍摄图像中提取特征点。
32、为了更好地实现本发明,进一步的,所述步骤1中拍摄相机的拍摄轴线与铅锤线之间的夹角为0°-60°。
33、为了更好地实现本发明,进一步的,所述拍摄相机的拍摄轴线与铅锤线之间的夹角每变化5°就进行一次拍摄。
34、本发明与现有技术相比,具有以下优点及有益效果:
35、本发明通过拍摄相机在同一平面内的不同角度位置拍摄掩膜版得到不同角度的拍摄图像,对拍摄图像进行傅里叶变换以将拍摄图像从空域转换至频域,并将不同角度的拍摄图像在频域中的频谱叠加合并,对叠加合并后的频谱进行傅里叶逆变换以将拍摄图像从频域转换至空域;对拍摄图像在空域与频域与之间进行往返迭代与约束,实现对拍摄图像的相位信息的增补复原,并根据增补复原后相位信息增强拍摄图像的强度以准确识别瑕疵,根据增补复原后相位信息解算瑕疵的深度,进而能够实现对掩膜版上的瑕疵进行更加精确的定位以及深度检测。
- 还没有人留言评论。精彩留言会获得点赞!