一种基于深度学习光流法的河流表面流速测量方法及系统与流程
本发明涉及水文测量,尤其涉及一种基于深度学习光流法的河流表面流速测量方法及系统。
背景技术:
1、在水利监测领域,对众多河流进行流速测量是管理水文数据,尤其是预防洪涝灾害工作中不可或缺的重要环节。
2、传统的流速测量方法需要使用流速仪器或在特定位置放置测速设备,这些需要与河流进行深入接触的方法普遍存在成本高、设备复杂以及测量范围有限等问题。近年来,光流法和深度学习作为无接触的测量方法逐渐受到关注。例如,有方法通过应用光流法检测河流表面流速,可以实现无接触、实时检测,避免了传统测量方法的限制和不便。然而,光流法在处理大流速、复杂水流条件和光照变化等方面仍面临一些挑战,尤其是当流速过快时像素点位移超出了光流法的测量范围,需要进一步研究和改进算法以提高准确性。还有方法利用深度学习算法对河流表面图像进行识别分类,能够区分不同流速下的水流图片,并根据多帧连续图片的位移得到水流流速,但该方法由于需要处理全部的样本数据,仍然存在精度不足和泛用性较差等问题。
3、因此,针对河流测速中存在的问题,需要提出一种改进的测量方法。
技术实现思路
1、本发明提供一种基于深度学习光流法的河流表面流速测量方法及系统,用以解决现有技术中在河流测速中采用光流法容易受干扰,以及应用的深度学习模型检测精度不高的缺陷。
2、第一方面,本发明提供一种基于深度学习光流法的河流表面流速测量方法,包括:
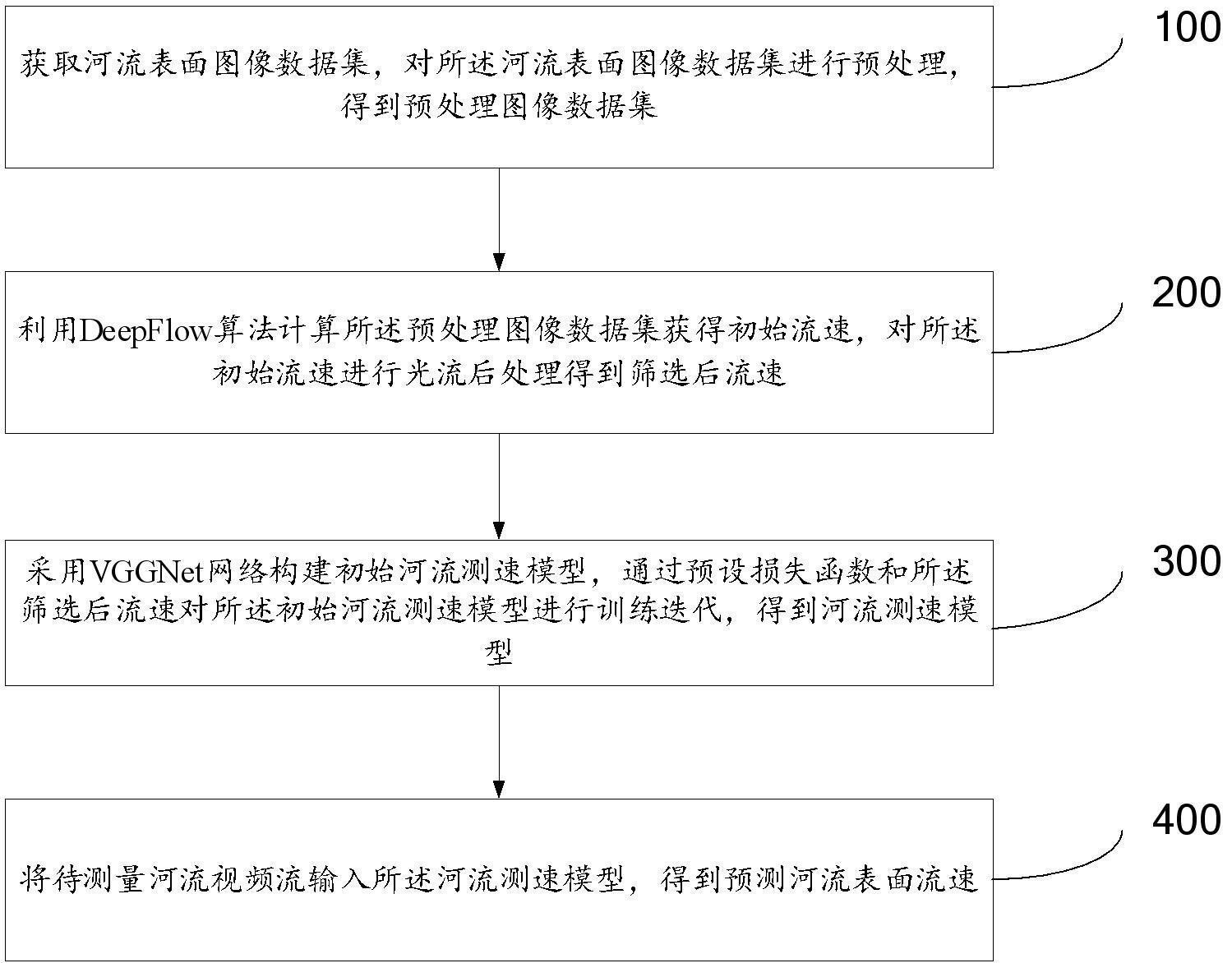
3、获取河流表面图像数据集,对所述河流表面图像数据集进行预处理,得到预处理图像数据集;
4、利用deepflow算法计算所述预处理图像数据集获得初始流速,对所述初始流速进行光流后处理得到筛选后流速;
5、采用vggnet网络构建初始河流测速模型,通过预设损失函数和所述筛选后流速对所述初始河流测速模型进行训练迭代,得到河流测速模型;
6、将待测量河流视频流输入所述河流测速模型,得到预测河流表面流速。
7、在一个实施例中,获取河流表面图像数据集,对所述河流表面图像数据集进行预处理,得到预处理图像数据集,包括:
8、采集河面原始视频数据,采用预设帧格式截取多帧图像数据;
9、对所述多帧图像数据进行去噪,将去噪后的多帧图像按照预设比例划分为训练集和测试集;
10、获取真实流速测量数据,以所述真实流速测量数据作为标签,基于所述训练集和所述测试集形成所述预处理图像数据集。
11、在一个实施例中,利用deepflow算法计算所述预处理图像数据集获得初始流速,包括:
12、利用卷积神经网络从所述预处理图像数据集中提取图像特征;
13、获取所述图像特征中的相邻帧特征点,确定所述相邻帧特征点的位移匹配信息;
14、基于光流估计能量最小化算法,计算所述位移匹配信息,得到光流场;
15、计算所述光流场中每个向量的平均值、方向和大小,采用预设尺度因子将每个向量中的光流速度转换为所述初始流速。
16、在一个实施例中,基于光流估计能量最小化算法,计算所述位移匹配信息,得到光流场,包括:
17、确定数据项、平滑项和匹配项,基于所述数据项、所述平滑项、平滑项平衡因子、所述匹配项和匹配项平衡因子构建能量函数,其中所述数据项通过比较两帧图像之间亮度差异确定光流估计准确性,所述平滑项通过比较相邻像素之间光流差异确定光流场平滑性;
18、基于深度学习对所述能量函数进行迭代优化,训练所述平滑项平衡因子和所述匹配项平衡因子,得到最优能量函数;
19、由所述最优能量函数确定所述光流场。
20、在一个实施例中,对所述初始流速进行光流后处理得到筛选后流速,包括:
21、基于预设流速范围筛选所述初始流速中的速度值,基于预设偏差角度范围筛选所述初始流速中的方向值,得到所述筛选后流速。
22、在一个实施例中,采用vggnet网络构建初始河流测速模型,通过预设损失函数和所述筛选后流速对所述初始河流测速模型进行训练迭代,得到河流测速模型,包括:
23、采用均方误差l2损失函数和河面流速值为主损失函数,采用均方误差l2损失函数、光流矢量速度和光流矢量角度为辅助损失函数,构建所述预设损失函数;
24、计算所述预设损失函数对所述初始河流测速模型的梯度信息,在所述初始河流测速模型的输出层向输入层的前向传播中,逐层更新参数,采用链式法计算所述梯度信息得到误差,将所述误差逐层进行反向传播;
25、基于所述梯度信息更新最优能量函数中的平滑项平衡因子和匹配项平衡因子,使所述预设损失函数逐渐减小;
26、重复执行前向传播、损失计算、更新参数和反向传播的步骤,直至满足预设迭代次数;
27、采用训练集进行模型训练,采用测试集进行模型性能评估,得到所述河流测速模型。
28、在一个实施例中,采用均方误差l2损失函数和河面流速值为主损失函数,采用均方误差l2损失函数、光流矢量速度和光流矢量角度为辅助损失函数,构建所述预设损失函数,包括:
29、确定光流矢量总数;
30、采用所述均方误差l2损失函数计算河面流速真实值、河面流速预测值以及所述光流矢量总数,得到所述主损失函数;
31、获取任一当前时刻光流矢量速度和任一当前时刻的上一时刻光流矢量速度,采用所述均方误差l2损失函数计算所述任一当前时刻光流矢量速度、所述上一时刻光流矢量速度和所述光流矢量总数,得到光流矢量速度损失函数;
32、采用所述均方误差l2损失函数计算光流矢量角度真实值、光流矢量角度预测值以及所述光流矢量总数,得到光流矢量角度损失函数;
33、根据所述主损失函数、所述光流矢量速度损失函数、光流矢量速度平衡因子、所述光流矢量角度损失函数和光流矢量角度平衡因子,得到所述预设损失函数。
34、在一个实施例中,采用vggnet网络构建初始河流测速模型,包括:
35、确定所述vggnet网络包括16个卷积层和3个全连接层,所述vggnet网络包括依次连接的第一模块、第二模块、第三模块、第四模块、第五模块和第六模块;
36、所述第一模块和所述第二模块分别包括两个卷积层、一个线性整流函数和一个最大池化层;
37、所述第三模块、所述第四模块和所述第五模块分别包括三个卷积层、三个激活层和一个最大池化层;
38、所述第六模块包括一个全连接层。
39、第二方面,本发明还提供一种基于深度学习光流法的河流表面流速测量系统,包括:
40、感知模块,用于获取河流表面图像数据集,对所述河流表面图像数据集进行预处理,得到预处理图像数据集;
41、数据处理模块,用于利用deepflow算法计算所述预处理图像数据集获得初始流速,对所述初始流速进行光流后处理得到筛选后流速;
42、计算模块,用于采用vggnet网络构建初始河流测速模型,通过预设损失函数和所述筛选后流速对所述初始河流测速模型进行训练迭代,得到河流测速模型;
43、输出模块,用于将待测量河流视频流输入所述河流测速模型,得到预测河流表面流速。
44、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述基于深度学习光流法的河流表面流速测量方法。
45、第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述基于深度学习光流法的河流表面流速测量方法。
46、本发明提供的基于深度学习光流法的河流表面流速测量方法及系统,通过采用deepflow光流法获得河面预测流速,并进一步构建vggnet深度学习网络和自定义损失函数对真实河面预测流速进行特征学习,有效提升河面流速测量准确性,并排除无效数据干扰,具有较强的特征学习能力,适应多变复杂的河流环境。
- 还没有人留言评论。精彩留言会获得点赞!