基于SVD卡尔曼滤波器的行星齿轮动态啮合力辨识方法
本发明涉及的是一种机械设计领域的技术,具体是一种基于svd卡尔曼滤波器的行星齿轮动态啮合力辨识方法。
背景技术:
1、由于行星齿轮结构紧凑,运行过程中齿面交替啮合,因此动态啮合力难以被直接测量。现有方法通常是根据行星齿轮系统的集中参数模型或有限元模型,通过设置时变啮合刚度、支撑刚度和传动误差激励等参数进行动态啮合力的计算或估计,但在实际工程应用中,这些参数是时变的,且难以被准确测量。
技术实现思路
1、本发明针对现有技术存在的上述不足,提出一种基于svd卡尔曼滤波器的行星齿轮动态啮合力辨识方法,能够通过齿轮箱体上的振动信号实现对行星齿轮动态啮合力的有效辨识。
2、本发明是通过以下技术方案实现的:
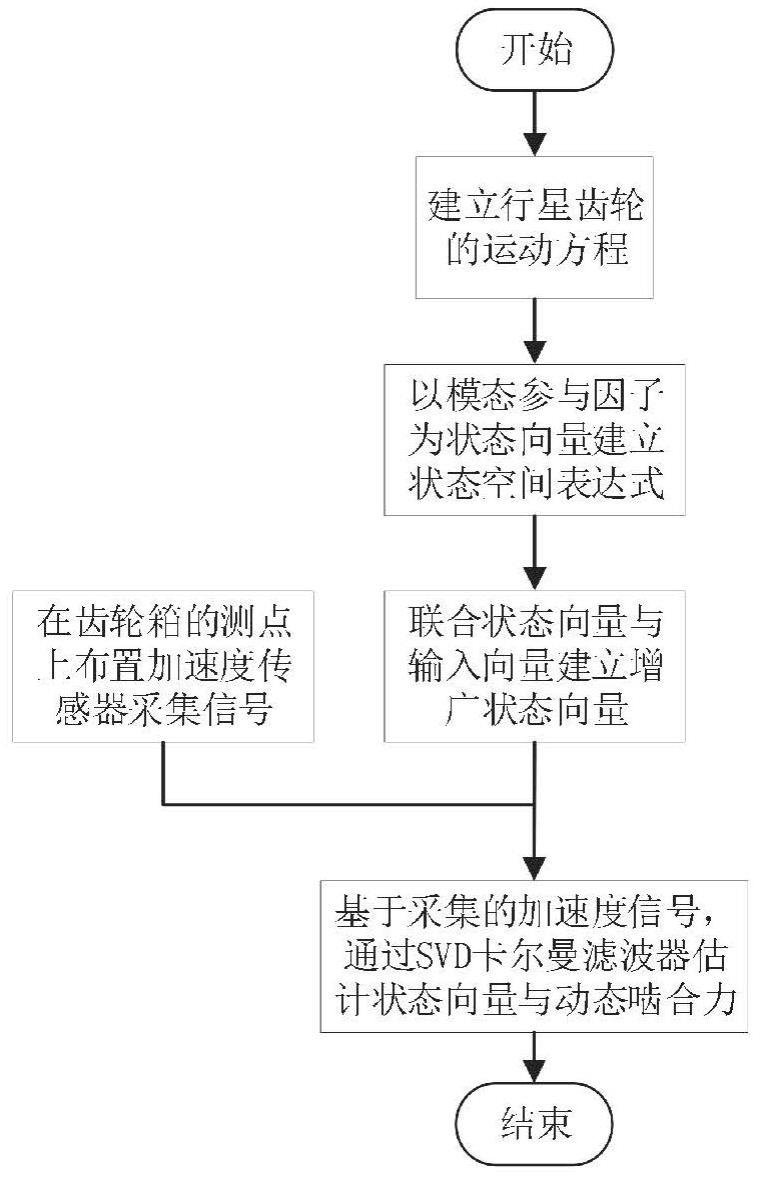
3、本发明涉及一种基于svd卡尔曼滤波器的行星齿轮动态啮合力辨识方法,通过构建行星齿轮的运动方程的状态空间表达式,将动态啮合力加入状态空间表达式中的状态向量得到增广状态向量后,转换为离散状态空间表达式形式;通过在齿圈上布置传感器以采集振动加速度信号,并基于svd卡尔曼滤波器实现对增广状态向量的估计,通过分离增广状态向量即可得到行星齿轮的动态啮合力。
4、本发明涉及一种实现上述方法的系统,包括:信号采集与预处理单元,用以采集齿圈上多个测点的振动加速度信号,并对采集的振动加速度信号进行裁剪,以使得不同测点采集的振动加速度信号具有相同的数据长度;增广状态向量辨识单元,根据行星齿轮运动方程的状态空间表达式,基于svd卡尔曼滤波器,根据振动加速度信号实现对增广状态向量的识别;动态啮合力获取单元,分离识别得到的增广状态向量,以得到行星齿轮的动态啮合力。
5、技术效果
6、本发明根据行星齿轮的运动方程,通过齿圈上的振动加速度信号,利用svd卡尔曼滤波器实现了对增广状态向量的识别,再通过分离增广状态向量从而得到行星齿轮动态啮合力。
7、本发明无需使用时变啮合刚度、支撑刚度和传动误差激励等难以确定的时变参数,仅根据行星齿轮运动方程和齿圈上的加速度信号既可实现对动态啮合力的辨识。
技术特征:
1.一种基于svd卡尔曼滤波器的行星齿轮动态啮合力辨识方法,其特征在于,通过构建行星齿轮的运动方程的状态空间表达式,将动态啮合力加入状态空间表达式中的状态向量得到增广状态向量后,转换为离散状态空间表达式形式;通过在齿圈上布置传感器以采集振动加速度信号,并基于svd卡尔曼滤波器实现对增广状态向量的估计,通过分离增广状态向量即可得到行星齿轮的动态啮合力。
2.根据权利要求1所述的基于svd卡尔曼滤波器的行星齿轮动态啮合力辨识方法,其特征是,包括:
3.一种实现权利要求1或2所述基于svd卡尔曼滤波器的行星齿轮动态啮合力辨识方法的系统,其特征在于,包括:信号采集与预处理单元,用以采集齿圈上多个测点的振动加速度信号,并对采集的振动加速度信号进行裁剪,以使得不同测点采集的振动加速度信号具有相同的数据长度;增广状态向量辨识单元,根据行星齿轮运动方程的状态空间表达式,基于svd卡尔曼滤波器,根据振动加速度信号实现对增广状态向量的识别;动态啮合力获取单元,分离识别得到的增广状态向量,以得到行星齿轮的动态啮合力。
技术总结
一种基于SVD卡尔曼滤波器的行星齿轮动态啮合力辨识方法,通过构建行星齿轮的运动方程的状态空间表达式,将动态啮合力加入状态空间表达式中的状态向量得到增广状态向量后,转换为离散状态空间表达式形式;通过在齿圈上布置传感器以采集振动加速度信号,并基于SVD卡尔曼滤波器实现对增广状态向量的估计,通过分离增广状态向量即可得到行星齿轮的动态啮合力。本发明能够通过齿轮箱体上的振动信号实现对行星齿轮动态啮合力的有效辨识。
技术研发人员:龙新华,罗顺安,彭志科
受保护的技术使用者:上海交通大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!