一种基于深度学习的路侧停车事件方法及系统与流程
本发明涉及智能交通管理领域,特别涉及一种基于深度学习的路侧停车事件方法及系统。
背景技术:
1、路侧停车管理是利用地面上通行公路两侧的场地进行停车管理的系统。随着科学技术的发展和经济的腾飞,路侧停车管理成为了城市停车管理的重要部分。众所周知,其管理过程中的高效自动化主要依靠对采集的图像帧进行计算的高效处理算法。因此,管理系统中停车场视频帧的处理算法的准确度及处理效率对于整个系统的运行有着举足轻重的影响。但是,路侧停车场因为其开放性,应用场景复杂多样,各种目标互相交错,其相应的处理算法也各有特色。受场景中其他运动物体的遮挡和视场角度的影响,视频帧中的车辆目标可能被遮挡,可能时隐时现,处理时,算法需要考虑很多的复杂情况。因此,路侧停车管理系统中对于出入场事件的判断方法,对于系统运行的准确度和效率是至关重要的。
2、目前,面对复杂的目标检测和运动监测应用场景,通常采用临近报警或者目标跟踪算法来处理。临近报警就是在停车区域即感兴趣区域,和正常行驶区域之间划出某种边界线,当检测到有目标接触边界线时就报警示意,但这种算法操作简单,边界线施划困难,报警结果准确率低,误报率高。目标跟踪算法计算复杂,硬件需求大,另外,容易受遮挡等外部复杂环境影响,导致路侧停车管理的准确性较低。
技术实现思路
1、为解决上述技术问题,本发明提供一种基于深度学习的路侧停车事件方法及系统,可以解决现有路侧停车管理的准确性较低的问题。
2、为实现上述目的,一方面,本发明提供一种基于深度学习的路侧停车事件方法,所述方法包括:
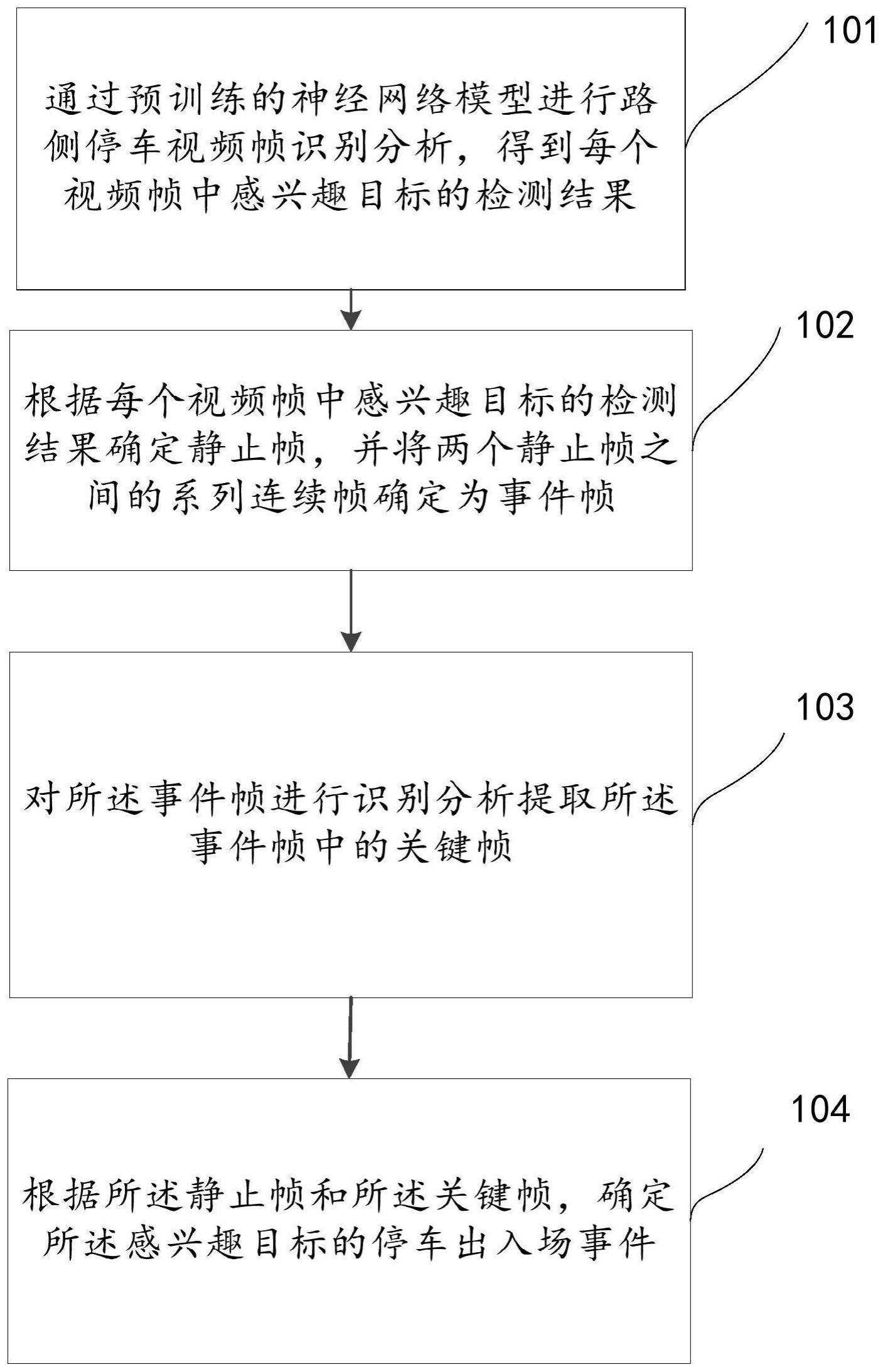
3、通过预训练的神经网络模型进行路侧停车视频帧识别分析,得到每个视频帧中感兴趣目标的检测结果;
4、根据每个视频帧中感兴趣目标的检测结果确定静止帧,并将两个静止帧之间的系列连续帧确定为事件帧;
5、对所述事件帧进行识别分析提取所述事件帧中的关键帧;
6、根据所述静止帧和所述关键帧,确定所述感兴趣目标的停车出入场事件。
7、进一步地,所述通过预训练的神经网络模型进行路侧停车视频帧识别分析,得到每个视频帧中感兴趣目标的检测结果的步骤包括:
8、通过不同角度的多个视频设备采集全天候的路侧停车场景图像视频帧;
9、对所述路侧停车场景图像视频帧中的车辆目标进行标注;
10、将标注后的路侧停车场景图像视频帧输送至选取的卷积神经网络中进行训练,得到所述预训练的神经网络模型。
11、进一步地,所述根据每个视频帧中感兴趣目标的检测结果确定静止帧的步骤包括:
12、若连续多个视频帧目标没有变化,则将新的一帧替换所述多个视频帧中最早的一帧,并比较更新后的多个视频帧的目标变化;
13、若检测到发生目标变化,则将进行更新前的连续多个视频帧确定为静止帧。
14、进一步地,所述对所述事件帧进行识别分析提取所述事件帧中的关键帧的步骤包括:
15、若根据两个静止帧以及之间的连续帧确定目标发生变化,则将所述两个静止帧以及之间的系列连续帧确定为事件帧;
16、将所述整个序列的事件帧中起始的静止帧作为第一关键帧;
17、选取整个序列事件帧中与第一关键帧变化最大的视频帧作为第二关键帧;
18、确定整个序列的事件帧中最后的静止帧作为第三关键帧。
19、进一步地,所述根据所述静止帧和所述关键帧,确定所述感兴趣目标的停车出入场事件的步骤包括:
20、根据相邻关键帧的变化情况确定所述感兴趣目标的停车出入场事件。
21、另一方面,本发明提供一种基于深度学习的路侧停车事件系统,所述系统包括:识别单元,用于通过预训练的神经网络模型进行路侧停车视频帧识别分析,得到每个视频帧中感兴趣目标的检测结果;
22、确定单元,用于根据每个视频帧中感兴趣目标的检测结果确定静止帧,并将两个静止帧之间的系列连续帧确定为事件帧。
23、提取单元,用于对所述事件帧进行识别分析提取所述事件帧中的关键帧;
24、所述确定单元,用于根据所述静止帧和所述关键帧,确定所述感兴趣目标的停车出入场事件。
25、进一步地,所述是识别单元,具体用于通过不同角度的多个视频设备采集全天候的路侧停车场景图像视频帧;对所述路侧停车场景图像视频帧中的车辆目标进行标注;将标注后的路侧停车场景图像视频帧输送至选取的卷积神经网络中进行训练,得到所述预训练的神经网络模型。
26、进一步地,所述确定单元,具体用于若连续多个视频帧目标没有变化,则将新的一帧替换所述多个视频帧中最早的一帧,并比较更新后的多个视频帧的目标变化;若检测到发生目标变化,则将进行更新前的连续多个视频帧确定为静止帧。
27、进一步地,所述提取单元,具体用于若根据两个静止帧以及之间的连续帧确定目标发生变化,则将所述两个静止帧以及之间的系列连续帧确定为事件帧;将所述整个序列的事件帧中起始的静止帧作为第一关键帧;选取整个序列事件帧中与第一关键帧变化最大的视频帧作为第二关键帧;确定整个序列的事件帧中最后的静止帧作为第三关键帧。
28、进一步地,所述确定单元,具体还用于根据相邻关键帧的变化情况确定所述感兴趣目标的停车出入场事件。
29、本发明提供的一种基于深度学习的路侧停车事件方法及系统,通过预训练的神经网络模型进行路侧停车视频帧识别分析,得到每个视频帧中感兴趣目标的检测结果,能够精确、高效地对视频设备采集到的各个视频帧进行分析判断,同时根据感兴趣结果将视频帧分类为静止帧、事件帧、以及关键帧,实现了对视频帧进行质量分析并自动归类,过滤其中质量不合格的视频帧,实现了路侧停车视频帧的自动化筛检,为实施进一步的路侧停车处理算法提供了重要的技术支持,不但提高了路侧停车行为的检测效率,还提高了路侧停车行为的检测准确率。
技术特征:
1.一种基于深度学习的路侧停车事件方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种基于深度学习的路侧停车事件方法,其特征在于,所述通过预训练的神经网络模型进行路侧停车视频帧识别分析,得到每个视频帧中感兴趣目标的检测结果的步骤之前,所述方法还包括:
3.根据权利要求1所述的一种基于深度学习的路侧停车事件方法,其特征在于,所述根据每个视频帧中感兴趣目标的检测结果确定静止帧的步骤包括:
4.根据权利要求1所述的一种基于深度学习的路侧停车事件方法,其特征在于,所述对所述事件帧进行识别分析提取所述事件帧中的关键帧的步骤包括:
5.根据权利要求4所述的一种基于深度学习的路侧停车事件方法,其特征在于,所述根据所述静止帧和所述关键帧,确定所述感兴趣目标的停车出入场事件的步骤包括:
6.一种基于深度学习的路侧停车事件系统,其特征在于,所述系统包括:
7.根据权利要求6所述的一种基于深度学习的路侧停车事件系统,其特征在于,
8.根据权利要求6所述的一种基于深度学习的路侧停车事件系统,其特征在于,
9.根据权利要求6所述的一种基于深度学习的路侧停车事件系统,其特征在于,所述提取单元,具体用于若根据两个静止帧以及之间的连续帧确定目标发生变化,则将所述两个静止帧以及之间的系列连续帧确定为事件帧;将所述整个序列的事件帧中起始的静止帧作为第一关键帧;选取整个序列事件帧中与第一关键帧变化最大的视频帧作为第二关键帧;确定整个序列的事件帧中最后的静止帧作为第三关键帧。
10.根据权利要求9所述的一种基于深度学习的路侧停车事件系统,其特征在于,
技术总结
本发明公开一种基于深度学习的路侧停车事件方法及系统,涉及智能交通管理领域,包括:通过预训练的神经网络模型进行路侧停车视频帧识别分析,得到每个视频帧中感兴趣目标的检测结果,能够精确、高效地对视频设备采集到的各个视频帧进行分析判断,同时根据感兴趣结果将视频帧分类为静止帧、事件帧、以及关键帧,实现了对视频帧进行质量分析并自动归类,过滤其中质量不合格的视频帧,实现了路侧停车视频帧的自动化筛检,为实施进一步的路侧停车处理算法提供了重要的技术支持,不但提高了路侧停车行为的检测效率,还提高了路侧停车行为的检测准确率。
技术研发人员:闫军,杨怀恒
受保护的技术使用者:智慧互通科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!