一种行驶轨迹预测模型的训练方法及行驶轨迹预测方法与流程
本发明涉及自动驾驶,尤其涉及一种行驶轨迹预测模型的训练方法及行驶轨迹预测方法。
背景技术:
1、随着智能驾驶技术的发展,如何准确的预测车辆的行驶轨迹成为了研究热点。
2、相关技术中,主要是采用以下两种方式来进行车辆轨迹预测,一种是利用光栅化地图数据和卷积神经网络(convolutional neural network,cnn)来进行车辆轨迹的预测,然而光栅化地图数据的捕捉范围有限,导致预测准确度低;另一种是采用循环神经网络(recurrent neural network,rnn)来进行轨迹预测,虽然可以通过融合时间序列上的多个时间维度的特征,从而实现对输入数据较好的特征提取,但由于轨迹预测的输入数据实质上是一种非欧数据,而循环神经网络由于缺乏高级的时空观,不能很好地处理非欧式空间的数据,使得对目标轨迹的预测准确性仍较低。
技术实现思路
1、为了解决现有技术的问题,本技术实施例提供了一种行驶轨迹预测模型的训练方法及行驶轨迹预测方法。所述技术方案如下:
2、一方面,提供了一种行驶轨迹预测模型的训练方法,所述方法包括:
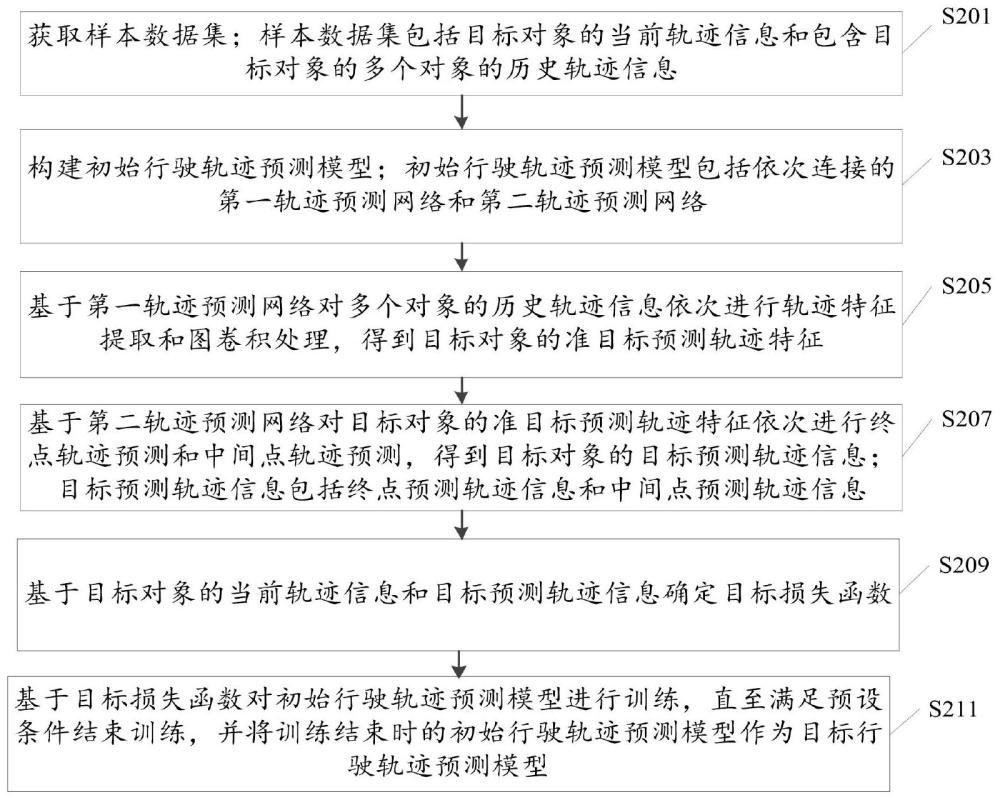
3、获取样本数据集;样本数据集包括目标对象的当前轨迹信息和包含目标对象的多个对象的历史轨迹信息;
4、构建初始行驶轨迹预测模型;初始行驶轨迹预测模型包括依次连接的第一轨迹预测网络和第二轨迹预测网络;
5、基于第一轨迹预测网络对多个对象的历史轨迹信息依次进行轨迹特征提取和图卷积处理,得到目标对象的准目标预测轨迹特征;
6、基于第二轨迹预测网络对目标对象的准目标预测轨迹特征依次进行终点轨迹预测和中间点轨迹预测,得到目标对象的目标预测轨迹信息;目标预测轨迹信息包括终点预测轨迹信息和中间点预测轨迹信息;
7、基于目标对象的当前轨迹信息和目标预测轨迹信息确定目标损失函数;
8、基于目标损失函数对初始行驶轨迹预测模型进行训练,直至满足预设条件结束训练,并将训练结束时的初始行驶轨迹预测模型作为目标行驶轨迹预测模型。
9、在一个示例性的实施例中,第一轨迹预测网络包括依次连接的轨迹特征提取网络、图卷积网络和融合网络;目标对象包括多个子目标对象;多个子目标对象为存在邻接关系的对象;基于第一轨迹预测网络对多个对象的历史轨迹信息依次进行轨迹特征提取和图卷积处理,得到目标对象的准目标预测轨迹特征,包括:
10、基于轨迹特征提取网络对多个对象的历史轨迹信息依次进行轨迹特征提取和筛选处理,得到目标对象的轨迹特征和目标对象的邻接矩阵;邻接矩阵表征目标对象中的多个子目标对象之间的邻接关系;轨迹特征包括目标对象中每个子目标对象的轨迹特征和目标对象中多组子目标对象的距离特征;每组子目标对象的距离特征为两个子目标对象的位置差特征;
11、基于目标对象的邻接矩阵,利用图卷积网络对目标对象的轨迹特征进行图卷积处理,得到目标对象的初始预测轨迹特征;
12、基于融合网络,对目标对象的初始预测轨迹特征依次进行特征提取和拼接操作,得到目标对象的准目标预测轨迹特征。
13、在一个示例性的实施例中,轨迹特征提取网络包括依次连接的第一特征提取网络和第二特征提取网络;基于轨迹特征提取网络对多个对象的历史轨迹信息依次进行轨迹特征提取和筛选处理,得到目标对象的轨迹特征和目标对象的邻接矩阵,包括:
14、基于第一特征提取网络对多个对象的历史轨迹信息进行特征提取,得到多个对象的初始轨迹特征;每个对象的初始轨迹特征包括位置特征和航向角特征;
15、基于第二特征提取网络对多个对象的初始轨迹特征进行筛选,得到目标对象的初始轨迹特征,以及对目标对象的初始轨迹特征依次进行特征提取和特征拼接操作,得到目标对象的轨迹特征;目标对象中存在直接邻近关系的任意两个子目标对象之间的欧式距离小于或者等于第一预设距离;
16、基于目标对象中各子目标对象的直接邻接子目标对象确定目标对象的邻接矩阵。
17、在一个示例性的实施例中,基于第二特征提取网络对多个对象的初始轨迹特征进行筛选,得到目标对象的初始轨迹特征,包括:
18、针对每个对象,基于多个对象的位置特征,确定对象与多个对象中其他对象的欧式距离;
19、将与对象的欧式距离小于或者等于第一预设距离的对象确定为对象的直接邻接对象;
20、基于多个对象中各对象的直接邻接对象,从多个对象中确定出目标对象;目标对象中的任意两个子目标对象存在直接邻接关系或者间接邻接关系;
21、基于目标对象,从多个对象的初始轨迹特征中筛选出目标对象的初始轨迹特征。
22、在一个示例性的实施例中,第二轨迹预测网络包括依次连接的第一终点轨迹预测网络、第二终点轨迹预测网络、中间点轨迹预测网络和结果预测网络;基于第二轨迹预测网络对目标对象的准目标预测轨迹特征依次进行终点轨迹预测和中间点轨迹预测,得到目标对象的目标预测轨迹信息,包括:
23、基于第一终点轨迹预测网络对目标对象的准目标预测轨迹特征进行特征提取,得到目标对象的预测终点的位置特征;
24、基于目标对象的预测终点的位置特征确定目标对象的预测终点的坐标,以及基于目标对象的预测终点的坐标,从预设地图信息中确定出目标对象的目标点的坐标;目标点与预测终点的距离小于或者等于第二预设距离;
25、基于第二终点轨迹预测网络,对目标对象的预测终点的坐标和目标点的坐标依次进行拼接和特征提取处理,得到目标对象的更新预测终点的位置特征;
26、基于中间点轨迹预测网络对目标对象的更新预测终点的位置特征和目标对象的准目标预测轨迹特征依次进行融合和卷积处理,得到目标对象的预测中间点的位置特征;
27、将融合后的目标对象的预测中间点的位置特征和目标对象的更新预测终点的位置特征,输入结果预测网络,得到目标对象的目标预测轨迹信息。
28、在一个示例性的实施例中,目标对象的目标预测轨迹信息包括多个子目标预测轨迹的坐标和每个子目标预测轨迹的轨迹评分;子目标预测轨迹的轨迹评分表征子目标预测轨迹与当前轨迹的接近程度值;目标对象的当前轨迹信息包括目标对象的当前轨迹的坐标和目标对象的当前轨迹的评分;当前轨迹的评分为1;基于目标对象的当前轨迹信息和当前预测轨迹信息确定目标损失函数,包括:
29、基于目标对象的子目标对象的数量、预测目标轨迹的坐标和当前轨迹的坐标确定回归损失函数;
30、基于目标对象的子目标对象的数量、预测目标轨迹的评分和当前轨迹的评分确定分类损失函数;
31、基于回归损失函数和分类损失函数确定目标损失函数。
32、在一个示例性的实施例中,第一特征提取网络由依次连接的第一残差网络、1×1卷积层和第二残差网络构成。
33、于另一方面,提供了一种行驶轨迹预测方法,所述方法包括:
34、获取目标对象的目标轨迹信息;目标轨迹信息包括历史轨迹信息和当前轨迹信息;
35、将目标对象的目标轨迹信息输入上述的目标行驶轨迹预测模型,得到目标对象的预测轨迹信息。
36、于另一方面,提供了一种行驶轨迹预测模型的训练装置,所述装置包括:
37、第一获取模块,用于获取样本数据集;样本数据集包括目标对象的当前轨迹信息和包含目标对象的多个对象的历史轨迹信息;
38、构建模块,用于构建初始行驶轨迹预测模型;初始行驶轨迹预测模型包括依次连接的第一轨迹预测网络和第二轨迹预测网络;
39、特征提取模块,用于基于第一轨迹预测网络对多个对象的历史轨迹信息依次进行轨迹特征提取和图卷积处理,得到目标对象的准目标预测轨迹特征;
40、第一预测模块,用于基于第二轨迹预测网络对目标对象的准目标预测轨迹特征依次进行终点轨迹预测和中间点轨迹预测,得到目标对象的目标预测轨迹信息;目标预测轨迹信息包括终点预测轨迹信息和中间点预测轨迹信息;
41、损失函数确定模块,用于基于目标对象的当前轨迹信息和目标预测轨迹信息确定目标损失函数;
42、训练模块,用于基于目标损失函数对初始行驶轨迹预测模型进行训练,直至满足预设条件结束训练,并将训练结束时的初始行驶轨迹预测模型作为目标行驶轨迹预测模型。
43、于另一方面,提供了一种行驶轨迹预测装置,所述装置包括:
44、第二获取模块,用于获取目标对象的目标轨迹信息;目标轨迹信息包括历史轨迹信息和当前轨迹信息;
45、第二预测模块,用于将目标对象的目标轨迹信息输入上述的目标行驶轨迹预测模型,得到目标对象的预测轨迹信息。
46、另一方面,提供了一种电子设备,包括处理器和存储器,所述存储器中存储有至少一条指令或者至少一段程序,至少一条指令或者至少一段程序由处理器加载并执行以实现上述任一方面的行驶轨迹预测模型的训练方法。
47、另一方面,提供了一种计算机可读存储介质,计算机可读存储介质中存储有至少一条指令或者至少一段程序,至少一条指令或者至少一段程序由处理器加载并执行以实现如上述任一方面的行驶轨迹预测模型的训练方法。
48、另一方面,提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。电子设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该电子设备执行上述任一方面的行驶轨迹预测模型的训练方法。
49、本技术实施例通过将样本数据集输入构建的初始行驶轨迹预测模型,由于样本数据集包括目标对象的当前轨迹信息和包含目标对象的多个对象的历史轨迹信息,从而可以基于该初始行驶轨迹预测模型先对多个对象的历史轨迹信息进行轨迹特征提取、图卷积处理、终点和中间点轨迹预测,得到目标对象的目标预测轨迹信息,基于目标对象的当前轨迹信息和目标预测轨迹信息确定目标损失函数;基于目标损失函数对初始行驶轨迹预测模型进行训练,直至满足预设条件结束训练,并将训练结束时的初始行驶轨迹预测模型作为目标行驶轨迹预测模型。如此,由于预测过程中融合了存在邻接关系的多个对象的关联信息,以及采用分部预测目标轨迹信息的方式(即先预测终点轨迹信息再预测中间点轨迹信息),不仅使得预测的目标轨迹信息准确,还提高了预测效率。
- 还没有人留言评论。精彩留言会获得点赞!