基于事件相机与脉冲神经网络的变工况机械故障诊断方法
本发明属于旋转机械故障诊断,具体涉及一种基于事件相机与脉冲神经网络的变工况机械故障诊断方法。
背景技术:
1、旋转机械已经被广泛应用于工业制造领域,是各类机械设备上必不可少的关键部分之一。旋转机械一旦出现故障,将会影响机械设备的整体性能,甚至造成严重的安全事故。因此,开发高效的旋转机械故障诊断方法尤为重要,针对旋转机械的智能故障诊断方法在近年来的发展十分迅速。
2、目前,故障诊断领域中最常用的信号类型是通过接触式加速度传感器采集的振动加速度数据([1]卞文彬,邓艾东,刘东川等.基于改进深度残差收缩网络的风电机组滚动轴承故障诊断方法[j].机械工程学报,2023,59(12):202-214;[2]孟宗,关阳,潘作舟等.基于二次数据增强和深度卷积的滚动轴承故障诊断研究[j].机械工程学报,2021,57(23):106-115),然而接触式加速度传感器在工业应用中的部署具有很大的局限性,并且现有的非接触式传感器通常成本高昂或效率低下。
3、同时,目前主流的基于传统深度神经网络的方法([3]j.lee,m.kim,j.u.ko,j.h.jung and k.h.sun,“asymmetric inter-intra domain alignments (aiida)methodfor intelligent fault diagnosis of rotating machinery,”reliabilityengineering&system safety,vol.218,part.b,pp.108186,feb.2022;[4]w.t.mao,g.s.wang,l.l.kou,and x.h.liang,“deep domain-adversarial anomaly detectionwith one-class transfer learning,”ieee/caa j.autom.sinica,vol.10,no.2,pp.524-546,feb.2023)对计算量的要求很高,这使得智能诊断模型难以在边缘计算硬件上实现实时部署,并且模型的表现能力难以得到进一步提升,这使得目前主流的智能故障诊断方法在实际工程问题中的适用性较差。
4、此外,由于可获得的实验室数据和在实际工程场景中采集的数据往往会有细微的差异,因而经常会出现训练数据和测试数据的分布不一致的情况,尤其是在实际工程场景中,故障数据很难获取,因而常规的迁移学习方法([5]叶楠,常佩泽,张露予等.基于改进后半监督深度信念网络的多工况轴承故障诊断研究[j].机械工程学报,2021,57(15):80-9)难以进行应用。
技术实现思路
1、为了克服上述现有技术的缺点,本发明的目的在于提供了一种基于事件相机与脉冲神经网络的变工况机械故障诊断方法,首先采用事件相机采集旋转机械的振动信号,然后使用脉冲卷积神经网络提取事件数据中的特征,并且在没有目标域故障数据的条件下实现了旋转机械的跨域诊断,从而提高了深度智能诊断方法在工程实际中的适用性。
2、为了达到上述目的,本发明采用的技术方案如下:
3、一种基于事件相机与脉冲神经网络的变工况机械故障诊断方法,包括以下步骤:
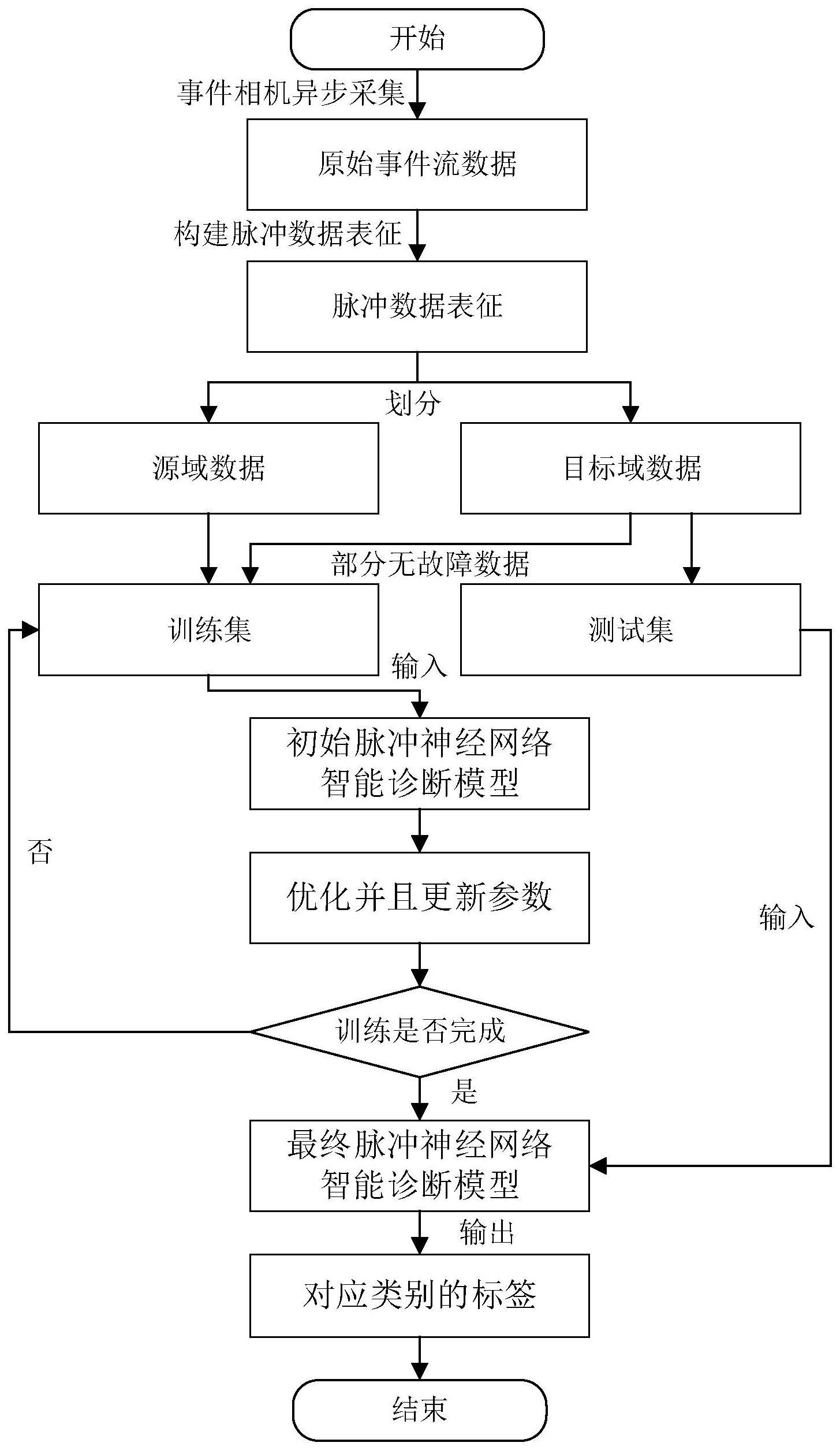
4、步骤1:采用事件相机对旋转机械的振动信号进行异步采集,从而获得旋转机械的原始事件流数据;
5、步骤2:对步骤1获取的原始事件流数据进行处理,构建脉冲数据表征;
6、步骤3:将步骤2构建的脉冲数据表征进行划分,构建脉冲事件数据集;
7、步骤4:构建卷积形式的初始脉冲神经网络智能诊断模型,先使用两个卷积层分别提取数据浅层以及深层特征,并使用两个最大池化层对数据浅层以及深层特征进行压缩,在每个最大池化层之后,均使用lif脉冲层作为激活函数;最后,处理后的高维特征被展平并通过两个线性层以及一个lif脉冲层输出;
8、步骤5:将步骤3获得的脉冲事件数据集的训练集送入步骤4构建的初始脉冲神经网络智能诊断模型进行训练,以获得源域与目标域的深层脉冲特征表示;
9、步骤6:对步骤5获得的源域与目标域深层脉冲特征表示,压缩其在时间维度上的特征;
10、步骤7:采用步骤6获得的压缩后的源域与目标域深层脉冲特征,分别计算各项损失,优化并且更新智能诊断模型的参数;
11、步骤8:重复执行步骤5-步骤7,迭代并且优化智能诊断模型,直至训练完成,获得最终脉冲神经网络智能诊断模型;
12、步骤9:将包含故障数据的测试集输入最终脉冲神经网络智能诊断模型,获得目标域上对应类别的标签。
13、所述的步骤1具体为:
14、在一段连续时间内采集旋转机械的振动信号,振动信号以事件的形式按发生的时间先后进行存储,一系列连续的事件即为事件流,事件流表示为其中ei表示第i个发生的事件,ne表示在这段连续时间中发生的事件总数;单个事件是一个四维数组,包含了事件发生的时间信息、空间信息以及极性,单个事件表示为:
15、ei=(ti,xi,yi,pi)
16、其中ti表示第i个事件发生的时间,xi和yi分别表示第i个事件发生的横坐标以及纵坐标位置,pi表示第i个事件的极性,当pi=1时,表示该事件为正事件,即在该位置发生了亮度增大的事件,并且亮度变化的幅度超过阈值,当pi=0时,表示该事件为负事件,即在该位置发生了亮度减小的事件,并且亮度变化的幅度超过阈值。
17、所述的步骤2具体为:
18、针对步骤1中使用事件相机采集的原始事件流数据,首先需要设置一个矩形区域作为边界,矩形区域表示为(xbl,xbu,ybl,ybu),其中xbu和xbl分别表示矩形区域在x轴上的上下边界值,ybu和ybl分别表示矩形区域在y轴上的上下边界值,将边界外的事件全部舍去,并且对在边界内事件进行空间标准化处理与时间标准化处理:
19、xi=xi-xbl
20、yi=yi-ybl
21、ti=ti-t0+1
22、其中t0为在边界内最先发生的事件的时间,经过筛选和标准化处理之后的事件流表示为其中nroi为在边界内发生的事件总数;
23、根据单个样本的时间宽度t0和样本个数ns确认所需事件流的总时间长度t0:
24、t0=t0*ns
25、构建脉冲数据表征,将每个样本表示为包含时间和空间信息的三维张量(vt,vx,vy),其中vt为样本的时间维度,取值与单个样本的时间宽度t0相关;vx与vy为样本的空间维度,取值与所选取的矩形区域的规格相关。
26、所述的步骤3具体为:
27、将步骤2构建的脉冲数据表征首先划分为源域以及目标域其中nsou为源域中的样本总数,ntar为目标域中的样本总数,dj为第j个脉冲事件样本,lj为样本dj对应的标签;源域中的数据包含类别对应的标签,而目标域中的数据不做处理;之后构建训练集为:
28、
29、其中ntrain为目标域中用于训练的样本总数,训练集包含源域中的全部数据以及目标域中部分不包含故障状态的数据,测试集为目标域中其余包含所有健康状态的数据:
30、
31、其中ntest为目标域中用于测试的样本总数。
32、所述的步骤5中源域与目标域的深层脉冲特征表示为:
33、
34、
35、其中u为lif神经元膜电位,o为lif神经元的脉冲输出,m和n分别为第m个以及第n个输入突触,ts表示时间步,q代表网络层序号,为膜电位的延迟效应,f(·)为阶跃函数,uth为电位阈值,该阈值将直接影响脉冲的输出。
36、所述的步骤6中压缩表示为:
37、
38、其中v表示特征值,t表示总时间步长,st表示t时刻脉冲神经网络输出的峰值。
39、所述的步骤7具体为:
40、采用步骤6获得的压缩后的源域与目标域深层脉冲特征,分别计算分类损失lcls,域迁移损失lmmd、类间分离损失linter以及类内密集损失lintra,以此优化并且更新模型的参数:
41、
42、
43、
44、
45、其中cls为类别数,yc为第c类数据的真实标签,pc为第c类数据的预测值,表示具有特征核k的再生核希尔伯特空间,es与et均表示求期望,φ(ss)与φ(st)分别表示源域xs与目标域xt的分布,其中w(q)(s(c))表示智能诊断模型第q层后第c类数据的特征;总优化目标表示为:
46、
47、其中α和β分别为类间分离损失以及类内密集损失的权重超参数。
48、和现有技术相比,本发明的有益效果为:
49、本发明提出了一种基于事件相机与脉冲神经网络的变工况机械故障诊断方法,采用事件相机从视觉角度非接触式的采集了机器的振动信号,并且使用卷积形式的脉冲神经网络智能诊断模型处理事件流、提取特征和故障诊断,该智能诊断模型还可以从不同的工况下中提取域不变特征,而无需目标域的机械故障数据。本发明方法进一步节省了深度智能诊断模型的计算量,提升了深度智能诊断模型在实际工程场景中的适用性,为深度智能诊断模型在实际工程场景中的部署提供了一种高效的方法。
- 还没有人留言评论。精彩留言会获得点赞!