一种超声波三维成像的井轴居中度的校正方法和装置与流程
本技术属于地质勘探,尤其涉及一种超声波三维成像的井轴居中度的校正方法和装置。
背景技术:
1、套管完井是建井过程中最主要的完井方式,其中,固井质量、地层错动、井筒服役年限、水力压裂增产作业、注采措施、储气库交变注采、流体性质等因素均会影响套管的工作状态,从而导致套管出现变形,对油气生产安全造成严重威胁。从目前的生产实践来看,套变的防控、检测与治理对于安全生产而言,都是很重要的。
2、其中,套变检测是进行套管变形评价、修复以及其他生产改造措施的前提,目前,套变检测技术主要有:多臂井径仪检测、电磁探伤检测、超声波三维成像检测等。在这些检测技术中,超声波三维成像检测技术具有方向性好、穿透能力强、测量精度高等特点,可以实现套管变形形态的精确测量与描述,能够有效解决井筒覆盖率低、测量精度和分辨率难以保证等问题。套管变形超声波三维成像检测技术原理是:将超声波探头安装在检测仪器的最下端,在入井检测过程中,仪器按照既定的速度上行或者下行,超声波探头在随着检测仪器上行或者下行的同时保持高速旋转,并朝向井筒方向发射超声波脉冲信号,超声波脉冲信号通过井筒工作液传播至套管内壁,再反射回来,最后的回波信号再由超声波探头接收,就这样通过自发自收的方式就完成了一个采样点数据的捕集。基于检测仪器的运行速度、超声波探头的转速以及超声波信号传播所需时间,优化设置超声波脉冲信号激发的时间间隔,进而就可以按照规律不断地激发脉冲信号,从而捕获得到大量采样点的数据。根据每个采样点的回波信号时差,可以计算得到仪器与套管内壁之间的距离,结合超声波探头的旋转角度和陀螺仪的方位校正,即可得到每个测点的位置坐标,将这些测点坐标在三维空间中呈现出来,就可以描绘出套管变形形态的三维特征。在理想的状态下,检测仪器在扶正器的支撑下会稳定地处在井眼轴线的中心位置,这样检测捕获的数据在不同井深处都有统一的中心位置,呈现出来的相对位置关系都可以以统一的中心位置作为参照。
3、然而,在实际的检测工况中,尤其是在长水平段,扶正器无法保证检测仪器的稳定居中状态,仪器会无规律地向井周方向发生偏移,这样就使得不同井深处的井轴参照发生了变化,相对位置关系无法准确判断。针对如何实现套管变形超声波三维成像井轴居中度校核,以提高三维成像的准确度,进而更好地呈现套管变形的真实形态,目前尚未提出有效的解决方案。
技术实现思路
1、本技术目的在于提供一种超声波三维成像的井轴居中度的校正方法和装置,可以对井轴方向发生偏移所产生的偏差进行校正,从而提升三维成像的准确度。
2、本技术提供一种超声波三维成像的井轴居中度的校正方法和装置是这样实现的:
3、一种超声波三维成像的井轴居中度的校正方法,所述方法包括:
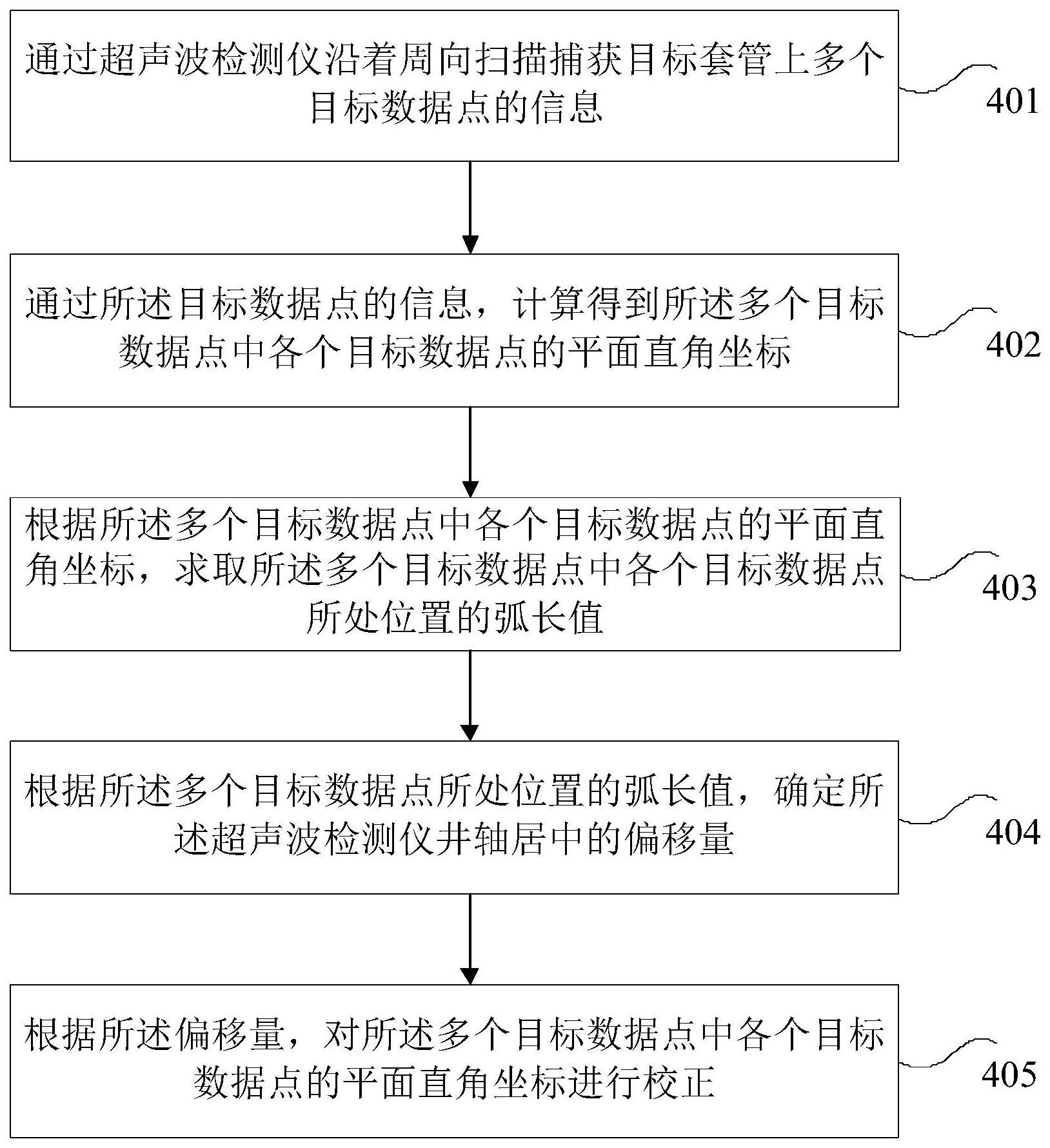
4、通过超声波检测仪沿着周向扫描捕获目标套管上多个目标数据点的信息;
5、通过所述目标数据点的信息,计算得到所述多个目标数据点中各个目标数据点的平面直角坐标;
6、根据所述多个目标数据点中各个目标数据点的平面直角坐标,求取所述多个目标数据点中各个目标数据点所处位置的弧长值;
7、根据所述多个目标数据点所处位置的弧长值,确定所述超声波检测仪井轴居中的偏移量;
8、根据所述偏移量,对所述多个目标数据点中各个目标数据点的平面直角坐标进行校正。
9、在一个实施方式中,所述多个目标数据点的信息包括:所述多个目标数据点的方位角度和距离;
10、相应的,通过所述目标数据点的信息,计算得到所述多个目标数据点中各个目标数据点的平面直角坐标,包括:
11、按照如下公式将所述多个目标数据点的方位角度和距离所表征的极坐标,转换为横坐标和纵坐标表征的平面直角坐标;
12、xi=ri×cos(θi)
13、yi=ri×sin(θi)
14、其中,xi表示第i个目标数据点的横坐标,yi表示第i个目标数据点的纵坐标,ri表示第i个目标数据点的距离,θi表示第i个目标数据点的方位角度。
15、在一个实施方式中,根据所述多个目标数据点中各个目标数据点的平面直角坐标,求取所述多个目标数据点中各个目标数据点所处位置的弧长值,包括:
16、按照如下公式计算多个目标数据点中各个目标数据点所处位置的弧长值:
17、
18、其中,i取值为[1,n-1],si表示第i个目标数据点所处位置的弧长值,xi表示第i个目标数据点的横坐标,yi表示第i个目标数据点的纵坐标,xi+1表示第i+1个目标数据点的横坐标,yi+1表示第i+1个目标数据点的纵坐标;
19、
20、其中,sn表示第n个目标数据点所处位置的弧长值,x1表示第1个目标数据点的横坐标,y1表示第1个目标数据点的纵坐标,xn表示第n个目标数据点的横坐标,yn表示第n个目标数据点的纵坐标。
21、在一个实施方式中,根据所述多个目标数据点所处位置的弧长值,确定所述超声波检测仪井轴居中的偏移量,包括:
22、从所述多个目标数据点所处位置的弧长值中选取最小弧长值,作为基准值;
23、计算所述多个目标数据点中各个目标数据点所处位置的弧长值与所述基准值之间的比值,将计算结果作为各个目标数据点的加权因子;
24、根据各个目标数据点的加权因子,计算圆周曲线的几何中心坐标;
25、获取所述超声波检测仪所处位置坐标作为参照原点坐标;
26、将几何中心坐标与参照原点坐标进行比较,以确定所述超声波检测仪井轴居中的偏移量。
27、在一个实施方式中,根据各个目标数据点的加权因子,计算圆周曲线的几何中心坐标,包括:
28、按照如下公式计算圆周曲线的几何中心坐标:
29、
30、
31、其中,x表示几何中心坐标的横坐标,y表示几何中心坐标的纵坐标,wi表示第i个目标数据点的加权因子,wsum表示各目标数据点的加权因子的累加值,xi表示第i个目标数据点的横坐标,yi表示第i个目标数据点的纵坐标。
32、在一个实施方式中,所述超声波检测仪应用在套管形变的检测中。
33、一种超声波三维成像的井轴居中度的校正装置,包括:
34、扫描模块,用于通过超声波检测仪沿着周向扫描捕获目标套管上多个目标数据点的信息;
35、计算模块,用于通过所述目标数据点的信息,计算得到所述多个目标数据点中各个目标数据点的平面直角坐标;
36、求取模块,用于根据所述多个目标数据点中各个目标数据点的平面直角坐标,求取所述多个目标数据点中各个目标数据点所处位置的弧长值;
37、确定模块,用于根据所述多个目标数据点所处位置的弧长值,确定所述超声波检测仪井轴居中的偏移量;
38、校正模块,用于根据所述偏移量,对所述多个目标数据点中各个目标数据点的平面直角坐标进行校正。
39、在一个实施方式中,所述确定模块包括:
40、选取单元,用于从所述多个目标数据点所处位置的弧长值中选取最小弧长值,作为基准值;
41、第一计算单元,用于计算所述多个目标数据点中各个目标数据点所处位置的弧长值与所述基准值之间的比值,将计算结果作为各个目标数据点的加权因子;
42、第二计算单元,用于根据各个目标数据点的加权因子,计算圆周曲线的几何中心坐标;
43、获取模块,用于获取所述超声波检测仪所处位置坐标作为参照原点坐标;
44、确定单元,用于将几何中心坐标与参照原点坐标进行比较,以确定所述超声波检测仪井轴居中的偏移量。
45、一种电子设备,包括处理器以及用于存储处理器可执行指令的存储器,所述处理器执行所述指令时实现上述方法的步骤。
46、一种计算机可读存储介质,其上存储有计算机程序/指令,该计算机程序/指令被处理器执行时实现上述方法的步骤。
47、本技术提供的超声波三维成像的井轴居中度的校正方法,通过超声波检测仪沿着周向扫描捕获目标套管上多个目标数据点的信息;通过所述目标数据点的信息,计算得到所述多个目标数据点中各个目标数据点的平面直角坐标;根据所述多个目标数据点中各个目标数据点的平面直角坐标,求取所述多个目标数据点中各个目标数据点所处位置的弧长值;根据所述多个目标数据点所处位置的弧长值,确定所述超声波检测仪井轴居中的偏移量;根据所述偏移量,对所述多个目标数据点中各个目标数据点的平面直角坐标进行校正。即,利用数据点之间的弧长差异来对确定检测仪器的偏心距,通过计算得到的偏心距即可对套管变形超声波三维成像井轴居中度进行校核,从而解决现有的无法对井轴居中度进行校核所导致的三维成像准确度较低的问题,达到了有效提升三维成像准确度的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!