一种时滞忆阻神经网络的预设时间同步控制方法
本申请涉及神经网络,具体涉及一种时滞忆阻神经网络的预设时间同步控制方法。
背景技术:
1、对神经网络的研究一直是人工智能技术的研究热点之一。神经网络是一个高度复杂的非线性系统,具有丰富的动力学行为,其动力学模型可通过一个超大规模的集成电路来实现。传统的神经网络模型具有固定阻值,其不能很好地模拟突触强度的变化,忆阻器的出现打破了这种僵局。忆阻器纳米级结构、断电后信息非易失性等优点,使得其成为模拟神经突触的良好器件,忆阻神经网络也具有更加复杂的动力学行为。在人脑信息传递过程中,不可避免的会受到时延的影响,因此本发明以带有时变时滞的忆阻神经网络为载体,进行稳定性及同步控制研究。该研究可应用于各种实际问题,如脑科学、社交网络和电力系统、信号安全传输等领域。
2、目前现有的同步方式有很多,常用的如渐进同步、有限时间同步、固定时间同步等。chen等人研究了神经网络的固定时间同步及其在信号传输中的应用,yu等人研究了复值忆阻神经网络的有限时间同步,gunasekaran等人研究了动态延迟神经网络的全局渐进鲁棒稳定性,liu等人提出了一个新的预设时间稳定性定理,研究了其在忆阻复值bam神经网络上的应用。
3、目前现有的同步方式存在一定的弊端。如渐进同步的收敛速度是难以确定的,这无法准确有效的把握同步时间;有限时间同步的收敛速度需要预先知道系统的初始值,而有些应用场景无法获取初始条件;固定时间同步的收敛时间上界需要通过控制器参数进行计算,有时参数较多计算起来较麻烦。
技术实现思路
1、本申请为了解决上述技术问题,提出了如下技术方案:
2、第一方面,本申请实施例提供了一种时滞忆阻神经网络的预设时间同步控制方法,其特征在于,包括:
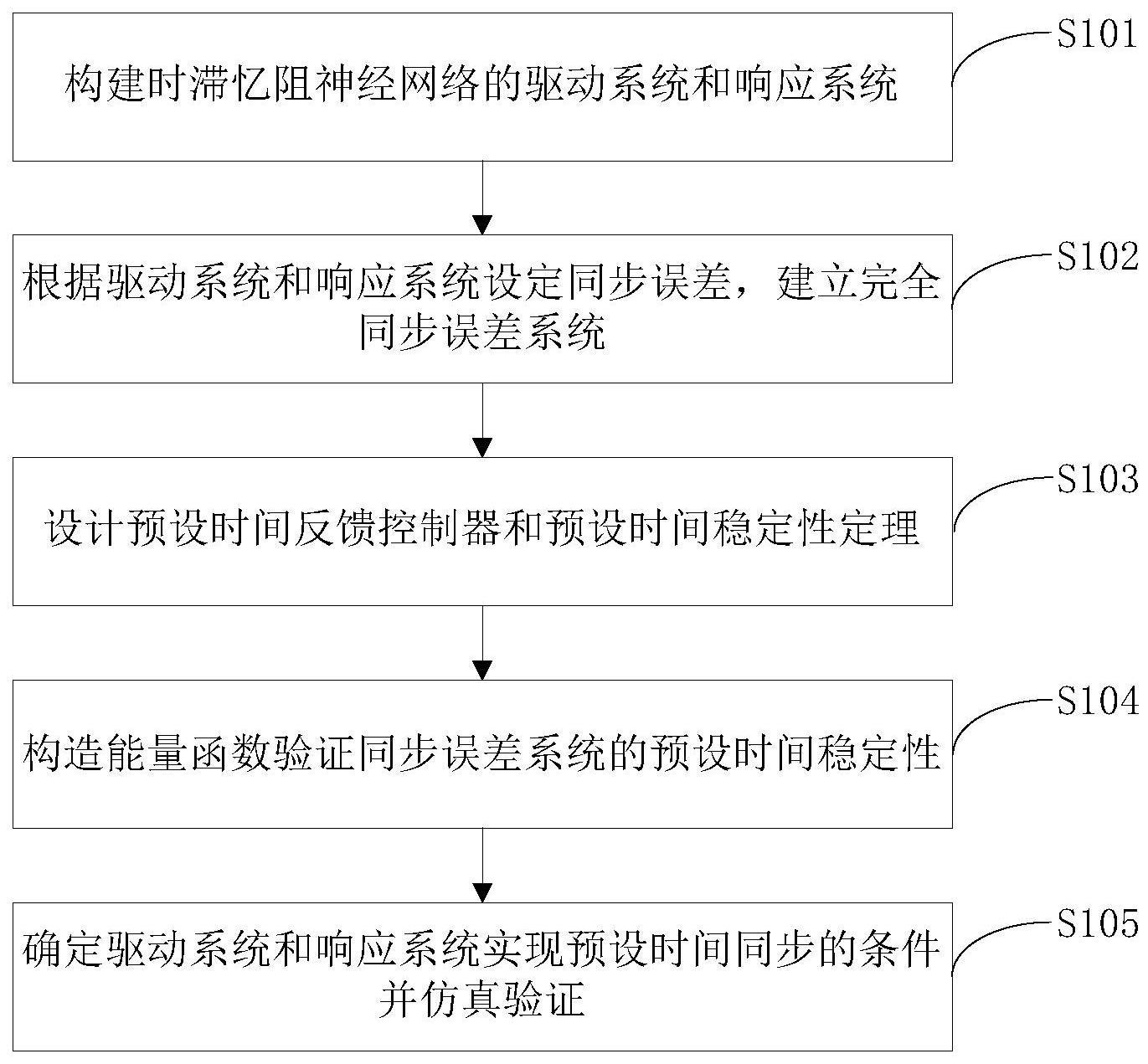
3、构建时滞忆阻神经网络的驱动系统和响应系统;
4、根据驱动系统和响应系统设定同步误差,建立完全同步误差系统;
5、设计预设时间反馈控制器和预设时间稳定性定理;
6、构造能量函数验证同步误差系统的预设时间稳定性;
7、确定驱动系统和响应系统实现预设时间同步的条件并仿真验证。
8、在一种可能的实现方式中,构建时滞忆阻神经网络的驱动系统,包括:
9、
10、其中,i=1,2,...,n;j=1,2,...,n.xi(t)表示神经元的状态,di表示神经元自抑制率,aij(·)和bij(·)表示连接权重,fj(·)和gj(·)表示激活函数且满足利普希茨条件,利普希茨常数分别设为lj和pj,τ(t)表示时滞,ii表示外部输入;
11、基于集值映射和微分包含理论,系统(1)转换为如下形式:
12、
13、其中,
14、a*,a**,b*,b**为实数,δ表示阈值,表示由a*和a**生成的凸闭包,因此,存在实数使得:
15、
16、在一种可能的实现方式中,构建时滞忆阻神经网络的响应系统,包括:
17、根据集值映射及微分包含,存在可得
18、
19、其中,i=1,2,...,n;j=1,2,...,n,ui(t)是待设计的控制器,yi(t)和yj(t)表示神经元的状态。
20、在一种可能的实现方式中,根据驱动系统和响应系统设定同步误差,建立完全同步误差系统,包括:
21、令同步误差ei(t)=yi(t)-xi(t),误差系统如下:
22、
23、驱动-响应系统具有不同的初始值,作差的目的是将驱动-响应系统的同步问题转化为误差系统的稳定性问题。
24、在一种可能的实现方式中,设计预设时间反馈控制器,包括:
25、
26、其中,θi,λi,αi,βi为大于0的反馈增益,指数0<ξ<1,η>1,tc为预设时间,gc为一个大于零的常数。
27、在一种可能的实现方式中,设计预设时间稳定性定理,包括:
28、假设存在一个正则、正定、无界函数v(e(t)):r→r,且以下两个条件成立:
29、
30、(2对于任意v(e(t))>0,存在α,β,gc,tc>0,η>1,0<ξ<1满足:
31、
32、则误差系统能够达到预设时间稳定;其中,
33、
34、稳定时间函数可以表示为:
35、
36、如果
37、
38、或者,如果
39、
40、令可以得到时w可得最小值因此,
41、
42、在一种可能的实现方式中,构造能量函数验证同步误差系统的预设时间稳定性,包括:
43、
44、对李雅普诺夫函数求导:
45、
46、其中,
47、在一种可能的实现方式中,确定驱动系统和响应系统实现预设时间同步的条件,包括:
48、驱动系统(1)和响应系统(4)在控制器(6)的作用下能够实现预设时间同步,则
49、在一种可能的实现方式中,仿真验证,包括:
50、假定驱动-响应系统各是二维的,涉及到的参数设置如下:
51、初始条件:x1(0)=-0.6,x2(0)=1.2,y1(0)=-0.12,y2(0)=0.27;
52、神经元自抑制率:d1=d2=1;
53、激活函数:fj(z)=tanh(z),gj(z)=0.5*(|1+z|-|z-1|);
54、外部输入:ii=0;
55、忆阻连接权重:
56、
57、
58、
59、
60、验证系统的预设时间同步与初始值无关,设定以下三组不同的初始值:
61、第一组:x1(0)=-0.6,x2(0)=1.2,y1(0)=-0.12,y2(0)=0.27;
62、第二组:x1(0)=3,x2(0)=-5,y1(0)=0.9,y2(0)=2.3;
63、第三组:x1(0)=1.5,x2(0)=2,y1(0)=0.9,y2(0)=-2.3。
64、在本申请实施例中,所提出的预设时间稳定性定理具有普适性,对现有预设时间稳定性定理进行了精简。将预设时间作为判断条件中的参数加入,使得误差系统的稳定时间会随预设参数的变化进行灵活调控,且不受系统初始条件的影响。其次,本发明所设计的控制器形式简洁,能够减少系统产生一些不必要的能量消耗,同时对误差系统能够有效进行控制。
技术特征:
1.一种时滞忆阻神经网络的预设时间同步控制方法,其特征在于,包括:
2.根据权利要求1所述的时滞忆阻神经网络的预设时间同步控制方法,其特征在于,构建时滞忆阻神经网络的驱动系统,包括:
3.根据权利要求2所述的时滞忆阻神经网络的预设时间同步控制方法,其特征在于,构建时滞忆阻神经网络的响应系统,包括:
4.根据权利要求3所述的时滞忆阻神经网络的预设时间同步控制方法,其特征在于,根据驱动系统和响应系统设定同步误差,建立完全同步误差系统,包括:
5.根据权利要求4所述的时滞忆阻神经网络的预设时间同步控制方法,其特征在于,设计预设时间反馈控制器,包括:
6.根据权利要求5所述的时滞忆阻神经网络的预设时间同步控制方法,其特征在于,设计预设时间稳定性定理,包括:
7.根据权利要求6所述的时滞忆阻神经网络的预设时间同步控制方法,其特征在于,构造能量函数验证同步误差系统的预设时间稳定性,包括:
8.根据权利要求7所述的时滞忆阻神经网络的预设时间同步控制方法,其特征在于,确定驱动系统和响应系统实现预设时间同步的条件,包括:
9.根据权利要求8所述的时滞忆阻神经网络的预设时间同步控制方法,其特征在于,仿真验证,包括:
技术总结
本申请公开了一种时滞忆阻神经网络的预设时间同步控制方法,包括:构建时滞忆阻神经网络的驱动系统和响应系统;根据驱动系统和响应系统设定同步误差,建立完全同步误差系统;设计预设时间反馈控制器;构造能量函数验证同步误差系统的预设时间稳定性;确定驱动系统和响应系统实现预设时间同步的条件并仿真验证。所提出的预设时间稳定性定理具有普适性,对现有预设时间稳定性定理进行了精简。将预设的时间作为参数施加到李雅普诺夫泛函上,使得误差系统的稳定时间会随预设参数的变化进行灵活调控,且不受系统初始条件的影响。其次,本发明所设计的控制器形式简洁,能够减少系统产生一些不必要的能量消耗,同时对误差系统能够有效进行控制。
技术研发人员:刘爱迪,赵慧,雷腾飞,黄丽丽
受保护的技术使用者:齐鲁理工学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!