基于长短期记忆神经网络的船舶运动包络预报方法及系统
本发明属于船舶与海洋工程,尤其涉及一种基于长短期记忆神经网络的船舶运动包络预报方法及系统。
背景技术:
1、随着海洋资源探测和开发的不断推进,海上作业和海上航行的需求变得越来越频繁和越来越复杂。其中船舶作为应用最广泛的海上交通工具和海上作业的载体,它从设计到使用都需要考虑六自由度运动对船舶本身以及海上作业效果的影响。在恶劣海况下,剧烈的摇荡运动不仅会影响船上设施的正常运行造成财产损失,甚至还会造成人员伤亡。因此如何精准预测船舶运动的时历数据的相关特征,从而指导相关作业的进行成为了需要被解决的问题。
2、而对于船舶运动的预报工作,主要有两个问题需要被解决。其一,由于船舶运动时历数据是周期性数据且周期较短,这使得在直接对运动时历数据进行预报时,可预报时长较短,实际使用价值较低。其二,目前用于预报船舶运动的方法可分为四类:基于水动力方法的预报模型,传统时序预报模型,神经网络模型,混合模型。因此,选择何种模型进行预报也是需要解决的问题。
3、由于传统的水动力模型中并没有船舶运动包络项,以及基于水动力方法的预报模型的时效性较差,因此基于水动力方法的预报模型不适用。而传统时序预报模型虽然计算效率较好但是预报效果较差,因此选用可以专门提取数据时序特征的长短期记忆(lstm)神经网络模型进行预报。并且能够通过提前完成离线训练预报模型,达到同时兼顾预报结果的准确度与计算效率的目的。由于船舶六自由度运动时历数据的周期较短,会导致数据的有效预报时长较短。并且在实际船舶作业时,受关注的船舶运动时历数据的特征是运动幅值的极值及其变化趋势,因此可以提取船舶运动包络时历数据,在保证船舶运动幅值特征不丢失的同时,将短周期数据转化为长周期数据,从而有效提高可预报时长。
4、现有资料中,在船舶运动包络预报方面,现有技术提供一种基于浮体运动时历包络预测的作业安全期预报系统,此方案包括人机交互、运动数据测量、数据预处理(包络提取)、数值计算(时间序列预报)和辅助决策,共五个模块,整体偏向一种系统。此方案采用极值提取和样条拟合得到船舶运动包络时历,其预报模型包括线性时间序列模型、非线性时间序列模型和神经网络模型,但并未说明预报模型中数据分割以及模型训练的具体算法。
5、该基于浮体运动时历包络预测的作业安全期预报系统接近方案的缺陷是在进行船舶运动包络时历提取的时候,采用的极值提取结合样条拟合的方式,此方法提取的船舶运动包络时历,在数据的两端会出现明显的异常值片段,即在两端的包络时历数据与真实的包络数据直接存在巨大差异,进而直接对船舶运动包络预报结果产生负面影响,降低预报结果精度。
6、在基于长短期记忆神经网络模型的船舶运动预报方面,现有技术提出一种基于长短时记忆网络和高斯过程回归的船舶运动预报方法。该方案对获取的某一自由度下的船舶运动历史数据进行归一化处理,形成船舶运动原始时间序列;将原始时间序列分为训练集和测试集;训练集和测试集重新构造数据集,建立长短时记忆网络模型进行预测,得到第一次船舶运动的预测结果;重新构造数据集,建立高斯过程回归模型进行预测,得到第二次船舶运动的预测结果;将高斯过程回归模型得到的预测结果进行反归一化,得到最终的船舶运动预测结果。
7、该基于长短时记忆网络和高斯过程回归的船舶运动预报方法方案的缺陷是直接使用船舶运动时历数据进行预报,由于船舶运动数据具有周期短的特点,导致有效预报时长比较短,仅仅实现提前1s的预报。
8、通过上述分析,现有技术存在的问题及缺陷为:
9、(1)在船舶运动包络预报方面,已有方案采用极值提取和样条拟合得到船舶运动包络时历,此方法得到的包络时历数据,在时间序列的两端会出现包络数据拟合异常的问题,即端点效应。尤其是序列末端的异常包络数据,会对船舶运动包络预测产生明显的负面影响;
10、(2)在基于长短期记忆神经网络模型的船舶运动预报方面,已有的实现方案是直接对船舶某一自由度运动时历进行极短期预报,由于船舶运动时历具有周期较短的特点,因此现有技术方案的有效预报时长较短,对于实际工程应用意义较小。
技术实现思路
1、为克服相关技术中存在的问题,本发明公开实施例提供了一种基于长短期记忆神经网络的船舶运动包络预报方法及系统。
2、所述技术方案如下:基于长短期记忆神经网络的船舶运动包络预报方法,包括以下步骤:
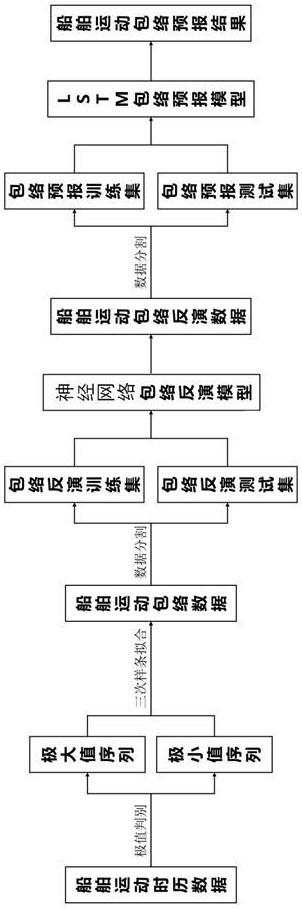
3、s1,提取船舶运动时历数据,得到船舶运动极值数据,对船舶运动极值数据进行三次样条拟合并截去两端数据,得到船舶运动包络时历数据;
4、s2,从船舶运动时历数据中截取与包络时历数据对应的片段,得到包络时历数据和运动时历数据,重构包络反演的训练集和测试集;
5、s3,建立神经网络模型,训练得到包络时历数据与运动时历数据的映射关系,并将完整的船舶运动时历数据输入建立的神经网络模型,反演得到完整的船舶运动包络时历数据;
6、s4,将得到的船舶运动包络时历数据划分为训练集和测试集,并输入到长短期记忆神经网络模型中,训练得到lstm包络预报模型的参数;
7、s5,使用包络反演模型和预报模型,基于过去一段时间的船舶运动时历数据对未来一段时间的船舶运动上下包络时历数据进行预测。
8、在步骤s1中,提取船舶运动时历数据,得到船舶运动极值数据包括:得到船舶某一自由度运动时历数据为,,若,则将与,,,对应的运动幅值进行比较;
9、若,则将提取为船舶运动极大值,最终得到船舶运动极大值时历数据;
10、若,则将提取为船舶运动极小值,最终得到船舶运动极小值时历数据;
11、所述对船舶运动极值数据进行三次样条拟合并截去两端数据,得到船舶运动包络时历数据包括:按照极值点数量,将得到的船舶运动极大值时历数据与船舶运动极小值时历数据分别划分为和间隔;设函数表示与的间隔中的数值,根据包络线连续光滑的要求,设置边界条件来求解参数,得到船舶运动包络曲线;设置采样频率为船舶运动时历数据频率,从得到的船舶运动上下包络线中采样得到船舶运动上包络时历数据和船舶运动下包络时历数据;设置两端截断长度,对船舶运动包络数据进行裁剪,得到船舶运动上包络时历数据和船舶运动下包络时历数据。
12、在步骤s2中,从船舶运动时历数据中截取与包络时历数据对应的片段包括:
13、船舶运动时历数据与船舶运动包络时历数据频率相同,从船舶运动时历数据为,,分别截取得到与船舶运动上包络时历数据对应的运动时历数据和与船舶运动下包络时历数据对应的运动时历数据;
14、将船舶运动上包络时历数据和其对应的运动时历数据均分割为两部分,分别作为训练集和测试集的数据来源,其中训练集所用数据具体包括:
15、,
16、;
17、其中,为训练集所用的船舶运动上包络时历数据,为训练集所用的船舶运动时历数据;
18、其余部分为测试集所用数据,具体包括:
19、,
20、;
21、其中,为测试集所用的船舶运动上包络时历数据,为测试集所用的船舶运动时历数据;
22、将船舶运动下包络时历数据和其对应的运动时历数据均分割为两部分,分别作为训练集和测试集的数据来源,其中训练集所用数据具体包括:
23、,
24、;
25、其中,为训练集所用的船舶运动上包络时历数据,为训练集所用的船舶运动时历数据;
26、其余部分为测试集所用数据,具体包括:
27、,
28、;
29、其中,为测试集所用的船舶运动上包络时历数据,为测试集所用的船舶运动时历数据;
30、其中,训练集和测试集的数据数量根据实际需求设置。
31、在步骤s2中,重构包络反演的训练集和测试集,具体包括:
32、设置窗口长度为,从划分得到的中分别采用滑动窗口法提取出以下表达式:
33、,
34、,
35、,
36、;
37、从中分别提取出:
38、,
39、,
40、,
41、;
42、然后,构建出上包络反演训练集,上包络反演测试集,其中,
43、,
44、,
45、,
46、;
47、其中,为上包络反演训练集中的标签部分,由若干个上包络时历片段组成;为上包络反演训练集中的特征部分,由若干个运动时历片段组成;为上包络反演测试集的标签部分,由若干个上包络时历片段组成;为上包络反演测试集中的特征部分,由若干个运动时历片段组成;
48、构建出下包络反演训练集,下包络反演测试集,
49、其中,
50、,
51、,
52、,
53、;
54、式中,为下包络反演训练集中的标签部分,由若干个下包络时历片段组成;为下包络反演训练集中的特征部分,由若干个运动时历片段组成;为下包络反演测试集的标签部分,由若干个下包络时历片段组成;为下包络反演测试集中的特征部分,由若干个运动时历片段组成。
55、在步骤s3中,建立神经网络模型,包括:
56、将得到的上包络反演训练数据集和下包络反演训练数据集分别输入神经网络模型中,设置数据集中的运动时历数据为特征,包络时历数据为标签,通过神经网络模型参数迭代,学习运动时历数据与包络时历数据的映射关系,最终得到船舶运动上包络反演模型和船舶运动下包络反演模型;上包络数据集用于训练迭代得到上包络反演模型,下包络数据集用于训练迭代得到下包络反演模型;
57、将船舶运动时历数据为,,输入两个反演模型中,得到神经网络船舶运动上包络时历数据和神经网络船舶运动下包络时历数据。
58、进一步,所述神经网络包括ann神经网络、lstm模型、gru模型、rnn模型中的一种。
59、在步骤s4中,训练得到lstm包络预报模型的参数包括:
60、训练得到包络时历数据与运动时历数据的映射关系,并将完整的船舶运动时历数据输入得到的神经网络模型,反演得到完整的船舶运动包络时历数据;然后将得到的船舶运动包络时历数据划分为训练集和测试集,并输入到长短期记忆神经网络模型中,训练得到lstm包络预报模型的参数;
61、将得到的神经网络船舶运动包络时历数据分别分割为两部分,训练集所用数据与测试集所用数据;
62、根据得到的训练集与测试集所用的数据,采用滑动窗口法构建船舶运动上包络数据集和船舶运动下包络数据集,数据集包括训练集和测试集;
63、构建长短期记忆神经网络模型,分别将船舶运动上包络数据集和船舶运动下包络数据集输入初始模型中,经过模型参数训练,最终得到船舶运动上包络与下包络预测模型。
64、在步骤s4中,将得到的船舶运动包络时历数据划分为训练集和测试集包括:
65、将得到的船舶运动上包络时历数据与船舶运动下包络时历数据,分别划分为训练集与测试集,得到船舶运动上包络预报训练集与船舶运动上包络预报测试集以及船舶运动下包络预报训练集与船舶运动下包络预报测试集,其中训练集与测试集的数据数量根据实际需求设定;
66、根据得到的训练集与测试集构建船舶运动上包络数据集和船舶运动下包络数据集具体包括:
67、设置历史输入步长back,以及提前预测步长ahead,从得到的上包络预报训练集所用数据中采用滑动窗口法提取以及,从得到的上包络预报测试集所用数据中采用滑动窗口法提取以及;然后构建上包络预报训练集,其中,;构建上包络预报测试集,其中,;
68、其中,为船舶运动上包络时历预报训练集中的特征部分,由若干个船舶运动上包络时历片段组成;为船舶运动上包络时历预报训练集中的标签部分,由若干个船舶运动上包络时历片段组成;为船舶运动上包络时历预报测试集中的特征部分,由若干个船舶运动上包络时历片段组成;为船舶运动上包络时历预报测试集中的标签部分,由若干个船舶运动上包络时历片段组成;
69、同样地,根据得到的下包络预报训练集和下包络预报测试集,构建下包络预报训练数据集和下包络预报测试数据集;
70、其中,为船舶运动下包络时历预报训练集中的特征部分,由若干个船舶运动下包络时历片段组成;为船舶运动下包络时历预报训练集中的标签部分,由若干个船舶运动下包络时历片段组成;为船舶运动下包络时历预报测试集中的特征部分,由若干个船舶运动下包络时历片段组成;为船舶运动下包络时历预报测试集中的标签部分,由若干个船舶运动下包络时历片段组成;根据得到的数据集分别构建长短期记忆神经网络模型,得到船舶运动上包络与下包络预测结果包括:建立长短期记忆神经网络模型,其中输入层节点数为back,隐藏层节点数为ahead,输出层节点数为1,神经元数量可根据具体情况调整;输入为船舶运动时间序列,输出为输入序列后ahead个步长的时刻的预测结果,输出内任意步长的预报结果;神经网络隐藏层计算后得到的输出为,网络输出为,其中,为权重矩阵,为偏移量;将训练数据集中的输入模型进行计算,将计算结果与训练数据集中的进行损失函数计算,迭代优化得到预测模型,其中损失函数的计算方式可选择均方误差、均方根误差、平均绝对误差和平均绝对百分比误差,最后将测试数据集中的输入训练完成的模型中可得到预测结果。
71、在步骤s5中,使用包络反演模型和预报模型,基于过去一段时间的船舶运动时历数据对未来一段时间的船舶运动上下包络时历数据进行预测包括:将得到的两个包络预报模型与所得的两个包络预报模型进行拼接,分别得到船舶运动上包络预测模型和船舶运动下包络预测模型。
72、本发明的另一目的在于提供一种基于长短期记忆神经网络的船舶运动包络预报系统,实施所述基于长短期记忆神经网络的船舶运动包络预报方法,该系统包括:
73、船舶运动包络时历数据获取模块,用于提取船舶运动时历数据,得到船舶运动极值数据,对船舶运动极值数据进行三次样条拟合并截去两端数据,得到船舶运动包络时历数据;
74、包络反演训练集和测试集重构模块,用于从船舶运动时历数据中截取与包络时历数据对应的片段,得到包络时历数据和运动时历数据,重构包络反演的训练集和测试集;
75、包络反演模型模块,用于建立神经网络模型,训练得到包络时历数据与运动时历数据的映射关系,并将完整的船舶运动时历数据输入建立的神经网络模型,反演得到完整的船舶运动包络时历数据;
76、预报模型获取模块,用于将得到的船舶运动包络时历数据划分为训练集和测试集,并输入到长短期记忆神经网络模型中,训练得到lstm包络预报模型的参数;
77、预测模块,使用包络反演模型和预报模型,基于过去一段时间的船舶运动时历数据对未来一段时间的船舶运动上下包络时历数据进行预测。
78、结合上述的所有技术方案,本发明所具备的优点及积极效果为:针对上述技术问题,本发明采用极值提取结合三次样条拟合得到截去两端后的船舶运动包络时历数据(样条),并且在船舶运动时历数据中截取与得到的包络时历数据(样条)对应的片段。基于得到的包络时历数据(样条)和运动时历数据进行数据分割,得到训练集和测试集,并通过建立神经网络模型,训练得到船舶运动时历数据与船舶运动包络数据的映射关系,实现由船舶运动时历数据直接反演得到船舶运动包络时历数据(神经网络),从而避免端点效应对运动预报的负面影响。
79、本发明采用神经网络模型,基于船舶运动时历反演得到船舶运动包络时历,然后采用长短期记忆神经网络(lstm)模型对船舶运动包络时历进行预报。由于船舶运动包络时历周期更长,故本发明可明显提升有效预报时长,具有更重要的工程意义。
80、本发明通过采用神经网络模型代替极值提取结合三次样条拟合的方法进行船舶运动包络时历提取,解决了传统船舶运动包络预报中,由于采用三次样条方法进行包络提取产生的两端数据异常所引起的船舶运动包络预报精度大幅下降问题。
81、本发明通过采用船舶运动包络提取对时历数据进行前处理,解决了在实际工程应用中,使用船舶运动时历进行直接预报导致的船舶运动特征有效预报时长较短的问题。
- 还没有人留言评论。精彩留言会获得点赞!