一种点云配准的方法、装置、电子设备和计算机存储介质与流程
本申请涉及地图领域,并且具体的,涉及一种点云配准的方法、装置、电子设备和计算机存储介质。
背景技术:
1、点云匹配(point cloud matching)是将两个或多个点云数据集进行对齐或配准的过程,以找到它们之间的变换关系。点云匹配在许多领域中都是重要的任务,如机器人导航、三维重建和自动驾驶等。
2、在点云匹配中,常用的方法包括迭代最近点(iterative closest point,icp)、正态分布变换算法(normal distributions transform,ndt)等。这些方法在不同的场景和要求下具有各自的优势和适用性。ndt算法使用高斯分布模型来描述点云的分布特性,通过最大化相似度指标来找到点云之间的最佳配准,适用于各种类型的点云数据。然而,ndt算法的缺点是没有直接针对点云数据的线面特征进行提取和表达,忽略了点云数据中的线面特征,在点云匹配时,ndt算法的准确性有待提高。
3、发明参数
4、本申请实施例提供了一种点云配准的方法、装置、电子设备和计算机存储介质,该方法在将点云匹配至栅格地图的过程中,充分考虑到栅格地图的线面特征,进而可以提高点云匹配的准确性。
5、第一方面,本申请实施例提供了一种的方法,包括:
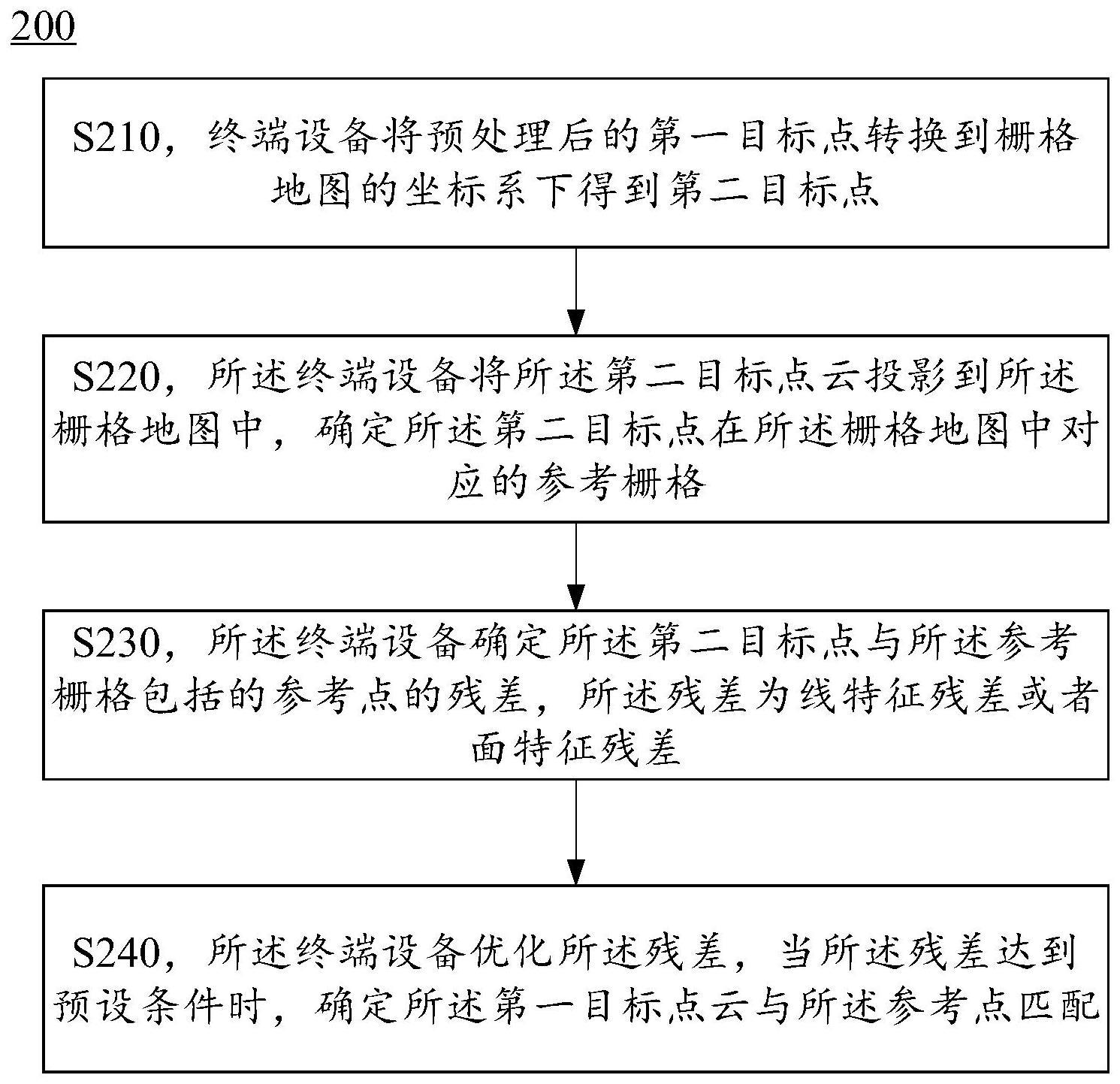
6、将预处理后的第一目标点转换到栅格地图的坐标系下得到第二目标点,其中,所述第一目标点为预处理后的激光雷达的点云数据的任一点;
7、将所述第二目标点云投影到所述栅格地图中,确定所述第二目标点在所述栅格地图中对应的参考栅格;
8、确定所述第二目标点与所述参考栅格包括的参考点的残差,所述残差为线特征残差或者面特征残差;
9、优化所述残差,当所述残差达到预设条件时,确定所述第一目标点云与所述参考点匹配。
10、第二方面,本申请实施例提供了一的装置,包括:
11、处理单元,用于将预处理后的第一目标点转换到栅格地图的坐标系下得到第二目标点,其中,所述第一目标点为预处理后的激光雷达的点云数据的任一点;
12、所述处理单元还用于将所述第二目标点云投影到所述栅格地图中,确定所述第二目标点在所述栅格地图中对应的参考栅格;
13、所述处理单元还用于确定所述第二目标点与所述参考栅格包括的参考点的残差,所述残差为线特征残差或者面特征残差;
14、所述处理单元还用于优化所述残差,当所述残差达到预设条件时,确定所述第一目标点云与所述参考点匹配。
15、第三方面,本申请实施例本申请提供了一种电子设备,包括:
16、处理器,适于实现计算机指令;以及,
17、存储器,存储有计算机指令,计算机指令适于由处理器加载并执行上述第一方面的方法。
18、第四方面,本申请实施例提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机指令,该计算机指令被计算机设备的处理器读取并执行时,使得计算机设备执行上述第一方面的方法。
19、第五方面,本申请实施例提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行上述第一方面的方法。
20、通过上述技术方案,将预处理后的第一目标点转换到栅格地图的坐标系下得到第二目标点,并将所述第二目标点投影到所述栅格地图中,确定所述第二目标点在所述栅格地图中对应的参考栅格,确定所述第二目标点与所述参考栅格包括的参考点的线特征残差或者面特征残差,进而优化所述线特征残差或者面特征残差来匹配所述第二目标点与所述参考点。在该第二目标点与参考点匹配的过程中,根据栅格地图中栅格的线特征值或面特征值构造残差,充分考虑到栅格地图中的线面特征,可以提高点云匹配的准确性。
技术实现思路
技术特征:
1.一种点云配准的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述确定所述第二目标点与所述参考点的残差,包括:
3.根据权利要求2所述的方法,其特征在于,所述将预处理后的第一目标点转换到栅格地图的坐标系下得到第二目标点,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据线特征的主方向、所述第二目标点云和所述参考栅格的均值,确定所述第二目标点云与所述参考点的线特征残差,包括:
5.根据权利要求4所述的方法,其特征在于,所述优化所述残差,包括:
6.根据权利要求5所述的方法,其特征在于,所述确定所述残差的雅可比矩阵,包括:
7.根据权利要求1所述的方法,其特征在于,
8.根据权利要求1所述的方法,其特征在于,所述方法还包括:
9.根据权利要求8所述的方法,其特征在于,所述每个栅格只保留第一次投影到所述每个栅格的所述第一目标点。
10.根据权利要求8或9所述的方法,其特征在于,所述方法还包括:
11.一种点云配准的装置,其特征在于,包括:
12.一种电子设备,其特征在于,包括处理器和存储器,所述存储器中存储有指令,所述处理器运行所述指令时,使得所述处理器执行权利要求1-10任一项所述的方法。
13.一种计算机存储介质,其特征在于,包括指令,当其在计算机上运行时,使得所述计算机执行权利要求1-10任一项所述的方法。
技术总结
本申请提供一种点云配准的方法、装置、电子设备和计算机存储介质,涉及自动驾驶技术领域。该方法包括:将预处理后的第一目标点转换到栅格地图的坐标系下得到第二目标点,其中,所述第一目标点为预处理后的激光雷达的点云数据的任一点;将所述第二目标点云投影到所述栅格地图中,确定所述第二目标点在所述栅格地图中对应的参考栅格;确定所述第二目标点与所述参考栅格包括的参考点的残差,所述残差为线特征残差或者面特征残差;优化所述残差,当所述残差达到预设条件时,确定所述第一目标点云与所述参考点匹配。在点云匹配的过程中,根据栅格地图中栅格的线特征值或面特征值构造残差,充分考虑到线面特征,可以提高点云匹配的准确性。
技术研发人员:慕翔,赵耀
受保护的技术使用者:腾讯科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!