基于线向量成对约束匹配的异尺度点云配准方法
本发明涉及异尺度点云配准,具体为基于线向量成对约束匹配的异尺度点云配准方法。
背景技术:
1、近年来,三维点云配准是点云处理中一项基础且重要的步骤,点云配准又分为同尺度点云配准和异尺度点云配准。同尺度点云配准主要是对同一个设备下采集到的不同帧点云进行配准,而异尺度点云配准主要是对不同设备下采集到的不同帧点云进行配准。但异尺度点云配准备准过程中需要考虑不同帧点云之间的尺度差异,且因其广泛灵活的适应性,在三维重建,同时定位和映射(simultaneous localization and mapping,slam),室内测绘,古建筑保护等领域受到越来越多的关注。
2、三维点云配准就是将不同视角下的点云转换到相同的参考坐标系下,从而合成一个三维全景图。然而,在实际应用的过程中,由于遮挡、光照和距离等因素的影响,不同视角下的点云之间的转换关系未知,因此,如何精确且快速地三维点云配准是一个很困难的问题。
3、迭代最近点配准(iterative closest point,icp)是一个流行的点云配准方法,但由于icp是基于每次转换的最近距离而建立对应关系的,这就导致其性能往往过于依赖两帧点云的初始位姿。sahillioglu等人提出scale-adaptive icp算法,它通过自适应的选择点与点的对应关系而完成异尺度的点云配准,具有一定的鲁棒性。chen等人使用马氏距离建立对应关系,它潜在地显著改善配准和校准,降低了一定的误差。但icp变种往往都不能处理具有较差初始位姿的点云,如多视图立体视觉(mvs)重建的点云和雷达扫描得到的点云。而mvs可以提供丰富的光谱信息,激光雷达可以提供准确的几何信息,使用mvs和激光雷达结合可以重建出更加真实和准确的三维场景,以提高目标检测、分类、语义分割等方法的精度。
4、随着3d描述符的发展,基于对应关系的点云配准方法由于不需要良好的初始位姿、更高的计算效率等优势受到越来越多的关注。基于对应关系的方法首先通过关键点检测方法得到关键点,然后对关键点进行特征描述,其次通过特征的相似度建立初始对应关系,最后通过鲁棒的估计算法估计位姿关系。其中关键点检测方法可以分为两类,即手工关键点检测和基于学习的关键点检测。手工关键点检测是通过分析点的结构特征得到,例如内部形状描述(iss)、meshdog等;基于学习的关键点是通过数据训练得到,例如keypointnet和无监督稳定兴趣点(usip)等。
5、关键点的特征描述也可分为手工特征描述和基于学习的特征描述。其中,常见的手工特征描述符有fpfh和shot,常见的基于学习的特征描述符有fcgf、pointdsc等。特征匹配主要是通过特征描述获取匹配分数,再通过匹配分数建立一对一的对应关系,如最邻近距离比策略。
6、特征匹配后可得到初始对应关系,但由于激光雷达本身的噪声和3d关键点检测质量等问题,初始对应关系的异常值率非常高,常常高达95%。在如此高的异常值率的情况下,常用的鲁棒估计算法,比如ransac以及其变体,往往需要大量的随机采样才能得到令人满意的效果,但这大大地降低了模型拟合的效率,因此如何提高模型拟合的效率变得极其重要。
7、在同尺度点云配准中,为了提高模型拟合效率,parra等人提出将匹配点的对应关系构成一个无向图,并通过有效的最大团算法获取成对一致的对应关系,并且其算法效率优于rasnsac。在异尺度点云配准中,yang等人提出了teaser++算法,它将异尺度点云配准问题解耦为子问题,并且对每个子问题的估计都使用了一个截断最小二乘(tls)。
8、li等人提出tgrs算法,该算法通过构造线向量并结合单点ransac算法来估计尺度信息,并且不需要其他的先验信息就可以估计尺度信息,并且效率优于其他ransac变种,但由于使用最大化共识集(mc)的方式估计尺度信息,导致尺度精度略低。范怡萍等将尺度因子与旋转和平移参数作为共同待求解的变量,利用人工蜂群算法进行求解,但是当点云较大时,计算成本较大,运行速度慢。gentner等人提出将尺度、旋转、平移均构建为一个无向图,通过图的最大团算法解决最大共识问题。彭澍等人通过提取两片异源点云中的平面,提出使用两个平面交线的最短距离估计尺度,但是当异源点云之间具有很少的平面时,算法难以估计,因此需要对以上问题提出一种新的解决方案。
技术实现思路
1、本发明的目的在于提供基于线向量成对约束匹配的异尺度点云配准方法,以解决背景技术中提出的技术问题。
2、为实现上述目的,本发明提供如下技术方案:基于线向量成对约束匹配的异尺度点云配准方法,至少包括以下步骤:
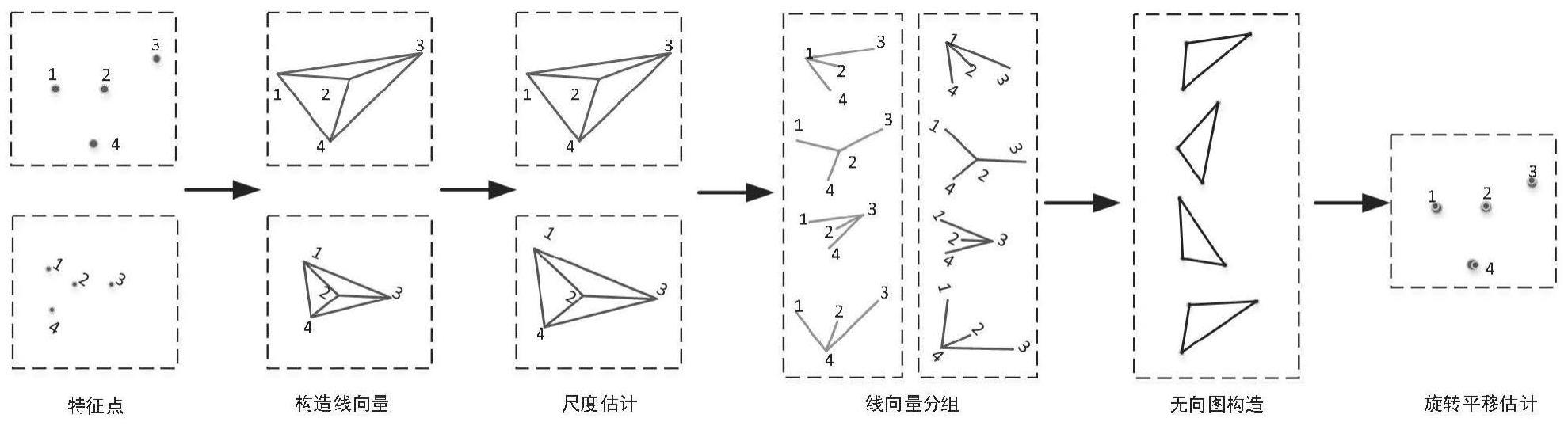
3、s1:输入的两个点云,提取特征点并对特征点构造特征描述符;
4、s2:使用特征相似度并结合kd-tree构造初始对应关系;
5、s3:构造每个特征点以及对应特征点的线向量;
6、s4:使用线向量计算尺度信息;
7、s5:将线向量按照其构造特点进行分组;
8、s6:将每个分组的线向量对应关系结合三角约束构建无向图,通过计算每个无向图中顶点的度数,筛选出符合要求的线向量;
9、s7:每个分组的对应关系通过irls估计旋转平移,得到两个点云的变换关系;
10、s8:将得到的变换关系应用于原始点云,完成配准。
11、优选的,所述s4至少包括以下步骤:
12、将两个对应点构造成一个线向量来以此估计尺度信息,再给定一对点对应关系(xi,yi)和(xj,yj),构造一组线向量的对应(xij=xi-xj,yij=yi-yj);
13、线向量对平移是不受影响的,受到尺度s和旋转r的影响,因此有:
14、yij=sr(xi-xj)+(ni-nj)=srxij+nij
15、其中nij=ni-nj为向量噪声,tgrs将yij=sr(xi-xj)+(ni-nj)=srxij+nij解析为一个共识集is问题,并通过最大化共识集的方式估计尺度因子,而最大化共识集is问题,转换为一个截断最小二乘估计问题:
16、
17、其中,代表给定内点噪声上限值,β为噪声阈值,sk=||yk||/||xk||。
18、优选的,所述s5至少包括以下步骤:
19、将每个线向量按公共端点分为m个组,其中m为预设的种子点数目,种子点的选取本文通过fpfh匹配得到的特征相似度决定;
20、优选的,所述s6中将每个分组的线向量对应关系结合三角约束构建无向图至少包括以下步骤:
21、通过将每个组构造为一个无向图,从而将对应关系通过约束联系,其中图的构造定义为,令g=(v,e)表示顶点v={vi}且边e={(vi,vj)}的无向图,通过多个定义,以完成图的构建;
22、尺度估计后,将异尺度点云配准问题转换为同尺度点云配准;
23、在同尺度点云配准中,若存在两个正确的对应点,两个特征点之间构成的欧氏距离对应相等;
24、将同尺度对应点的一致性约束改良并在无向图中使用,根据不同的约束关系构成对应的无向图。
25、优选的,所述s6中的通过计算每个无向图中顶点的度数,筛选出符合要求的线向量至少包括以下步骤:经过线向量分组约束后,每个分组都得到一个全新的无向图结构后,通过统计无向图的各顶点的度来匹配内点。
26、优选的,所述s7至少包括以下步骤:
27、将筛选后的线向量映射为特征点,然后使用迭代重irls进行旋转平移估计,
28、将重新定义为:
29、
30、其中权重函数为:
31、
32、其中u为权重函数的一个尺度,r表示对应点相对于估计模型的残差值,由权重函数得到,随着残差值越大,权重值越小;
33、在该迭代过程中,通过一个逐步优化的策略,开始给本文给尺度u赋予一个大的初始值,然后每迭代一次,本文通过步长α,迭代更新u=u/α,以此控制每次迭代的权重,最后本文通过为每个对应点赋予新的权重,并使用svd来求解r和t,直至循环结束;
34、通过irls算法得到单个组的估计值,而线向量分组约束构造无向图步骤中,将线向量分为了m个组,针对多个估计值,通过和ransac同样的内点计数准则来评估模型的质量:
35、
36、其中[]为艾弗森括号,为内点阈值,选择得分最高的模型作为最终的刚体变换结果。
37、与现有技术相比,本发明的有益效果是:
38、本发明针对算法精度、高异常值率、初始化等问题设计一种具有以下特性的异尺度点云配准方法:高效率、高鲁棒性和无初始化,首先通过tgrs提出的线向量对异尺度点云进行尺度估计,并以此将异尺度点云配准问题转换为同尺度点云配准;
39、且根据线向量的构造特点对线向量进行分组,这极大地降低了时间复杂度,其次还以线向量对应关系为图顶点提出了一个新的无向图结构,并通过提出的三角约束建立无向图顶点之间的联系;
40、还提出一种统计图顶点度的方式近似最大团算法以此寻找正确对应关系,这样避免了在无向图为稠密图时最大团算法迭代时间过长的情况,对于旋转平移的估计;
41、提出通过irls估计每个分组的旋转和平移,然后使用与ransac相同的方式统计每个分组的内点数,并以最佳的模型参数作为结果;
42、提出的线向量成对约束的方法只需要以分组线向量作为输入,每个分组分别寻找最优参数,这极大的提高了算法的鲁棒性和高效性,并且采用的方法不需要像icp及其变体的方法需要一个良好的初始位姿。
- 还没有人留言评论。精彩留言会获得点赞!