光度立体误差分析方法、装置、电子设备及存储介质
本发明涉及计算机视觉,尤其涉及一种光度立体误差分析方法、装置、电子设备及存储介质。
背景技术:
1、在计算机视觉中,光度立体法用于从多个不同光线条件下拍摄的二维图像中重建三维形状。其基本思想是:假设物体表面反射光线的方式符合一定的反射模型,通过各影像相同位置灰度的变化,推断出物体每个点的表面法线,其优点是不需要先验知识。
2、但是,光度立体法受到多种误差的影响,如光源方向测量误差、图像辐照度测量误差以及成像姿态误差等。为了提高三维重建的精确度,需要对相关误差进行系统的分析和研究。由于恢复法向量结果用梯度表示,现有的光度立体误差分析方法的复杂性,构成了光度立体定量分析和高精度重建的瓶颈问题。
3、因此,如何降低光度立体误差分析的复杂度,成为业界亟待解决的技术问题。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种光度立体误差分析方法、装置、电子设备及存储介质。
2、第一方面,本发明提供一种光度立体误差分析方法,包括:
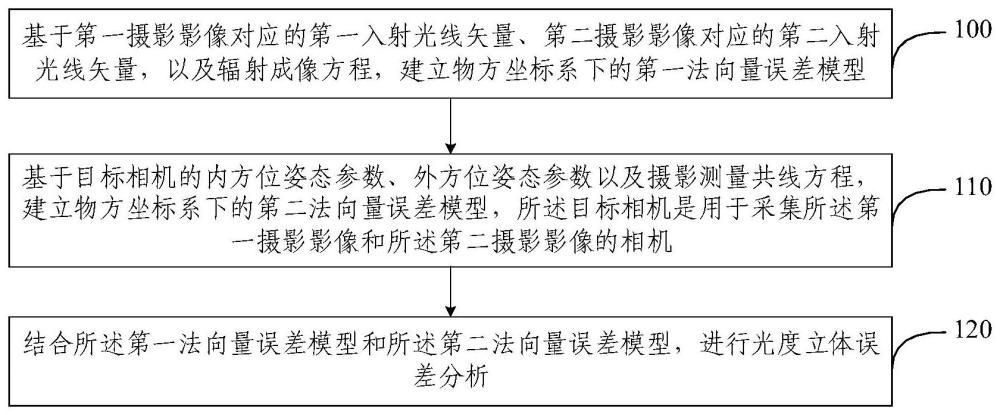
3、基于第一摄影影像对应的第一入射光线矢量、第二摄影影像对应的第二入射光线矢量,以及辐射成像方程,建立物方坐标系下的第一法向量误差模型;
4、基于目标相机的内方位姿态参数、外方位姿态参数以及摄影测量共线方程,建立物方坐标系下的第二法向量误差模型,所述目标相机是用于采集所述第一摄影影像和所述第二摄影影像的相机;
5、结合所述第一法向量误差模型和所述第二法向量误差模型,进行光度立体误差分析。
6、可选地,根据本发明提供的一种光度立体误差分析方法,所述基于第一摄影影像对应的第一入射光线矢量、第二摄影影像对应的第二入射光线矢量,以及辐射成像方程,建立物方坐标系下的第一法向量误差模型,包括:
7、确定所述第一入射光线矢量对应的天顶角和方位角,并确定所述第二入射光线矢量对应的天顶角和方位角;
8、将所述第一入射光线矢量对应的天顶角和方位角,以及所述第二入射光线矢量对应的天顶角和方位角代入所述辐射成像方程,并结合lambert反射模型,获得物方坐标系下的第一法向量矢量;
9、基于所述第一法向量矢量,以及所述lambert反射模型中的反照率造成的误差,建立所述第一法向量误差模型。
10、可选地,根据本发明提供的一种光度立体误差分析方法,所述第一入射光线矢量对应的方位角为0。
11、可选地,根据本发明提供的一种光度立体误差分析方法,所述第一法向量误差模型表示为:
12、;
13、其中,表示所述第一法向量矢量沿物方坐标系x方向的误差,表示所述第一法向量矢量沿物方坐标系y方向的误差,表示所述第一法向量矢量沿物方坐标系x方向的坐标,表示所述第一法向量矢量沿物方坐标系y方向的坐标,表示所述反照率,表示反照率误差,表示所述第一摄影影像的灰度,表示所述第二摄影影像的灰度,表示所述第一入射光线矢量对应的天顶角,表示所述第二入射光线矢量对应的天顶角,表示所述第二入射光线矢量对应的方位角。
14、
15、
16、可选地,根据本发明提供的一种光度立体误差分析方法,所述基于目标相机的内方位姿态参数、外方位姿态参数以及摄影测量共线方程,建立物方坐标系下的第二法向量误差模型,包括:
17、将所述内方位姿态参数和所述外方位姿态参数代入所述摄影测量共线方程,获得物方坐标系下的第二法向量矢量;
18、基于所述第二法向量矢量和误差传播定律,建立所述第二法向量误差模型。
19、可选地,根据本发明提供的一种光度立体误差分析方法,所述第二法向量误差模型表示为:
20、
21、其中,表示所述第二法向量矢量沿物方坐标系x方向的误差,表示所述第二法向量矢量沿物方坐标系y方向的误差,zx_2表示所述第二法向量矢量沿物方坐标系x方向的坐标,zy_2表示所述第二法向量矢量沿物方坐标系y方向的坐标,是航向倾角,ω是旁向倾角,κ是像片倾角。
22、第二方面,本发明还提供一种光度立体误差分析装置,包括:
23、第一建立模块,用于基于第一摄影影像对应的第一入射光线矢量、第二摄影影像对应的第二入射光线矢量,以及辐射成像方程,建立物方坐标系下的第一法向量误差模型;
24、第二建立模块,用于基于目标相机的内方位姿态参数、外方位姿态参数以及摄影测量共线方程,建立物方坐标系下的第二法向量误差模型,所述目标相机是用于采集所述第一摄影影像和所述第二摄影影像的相机;
25、误差分析模块,用于结合所述第一法向量误差模型和所述第二法向量误差模型,进行光度立体误差分析。
26、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如第一方面所述光度立体误差分析方法。
27、第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如第一方面所述光度立体误差分析方法。
28、第五方面,本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述光度立体误差分析方法。
29、本发明提供的光度立体误差分析方法、装置、电子设备及存储介质,通过基于第一摄影影像对应的第一入射光线矢量、第二摄影影像对应的第二入射光线矢量,以及辐射成像方程,建立物方坐标系下的第一法向量误差模型,同时基于目标相机的内方位姿态参数、外方位姿态参数以及摄影测量共线方程,建立物方坐标系下的第二法向量误差模型,进而结合第一法向量误差模型和第二法向量误差模型,进行光度立体误差分析;即通过基于辐射方程和摄影测量共线方程建立法向量误差模型,进而基于该法向量误差模型进行光度立体误差分析,由于该法向量误差模型结合了光照信息和成像姿态信息,故而使得光度立体误差分析更加精确,而且简化了传统复杂的数学计算,算法简单,易于实现。
技术特征:
1.一种光度立体误差分析方法,其特征在于,包括:
2.根据权利要求1所述的光度立体误差分析方法,其特征在于,所述基于第一摄影影像对应的第一入射光线矢量、第二摄影影像对应的第二入射光线矢量,以及辐射成像方程,建立物方坐标系下的第一法向量误差模型,包括:
3.根据权利要求2所述的光度立体误差分析方法,其特征在于,所述第一入射光线矢量对应的方位角为0。
4.根据权利要求3所述的光度立体误差分析方法,其特征在于,所述第一法向量误差模型表示为:
5.根据权利要求1所述的光度立体误差分析方法,其特征在于,所述基于目标相机的内方位姿态参数、外方位姿态参数以及摄影测量共线方程,建立物方坐标系下的第二法向量误差模型,包括:
6.根据权利要求5所述的光度立体误差分析方法,其特征在于,所述第二法向量误差模型表示为:
7.一种光度立体误差分析装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述光度立体误差分析方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述光度立体误差分析方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述光度立体误差分析方法。
技术总结
本发明提供一种光度立体误差分析方法、装置、电子设备及存储介质,涉及计算机视觉技术领域,方法包括:基于第一摄影影像对应的第一入射光线矢量、第二摄影影像对应的第二入射光线矢量,以及辐射成像方程,建立物方坐标系下的第一法向量误差模型;基于目标相机的内方位姿态参数、外方位姿态参数以及摄影测量共线方程,建立物方坐标系下的第二法向量误差模型;结合第一法向量误差模型和第二法向量误差模型,进行光度立体误差分析。本发明通过首先基于辐射方程和摄影测量共线方程建立法向量误差模型,进而基于建立的该法向量误差模型进行光度立体误差分析,不仅使得光度立体误差分析更加精确,而且简化了传统复杂的数学计算,算法简单,易于实现。
技术研发人员:彭嫚,王晔昕,万文辉,刘召芹,邸凯昌
受保护的技术使用者:中国科学院空天信息创新研究院
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!