一种医美设备的移动轨迹规划方法及系统与流程
本发明涉及人工智能领域,尤其涉及一种医美设备的移动轨迹规划方法及系统。
背景技术:
1、随着人工智能和自动化技术的不断发展,智能设备在工业、医疗、交通、农业等各个领域得到了广泛应用。特别是在医疗美容领域,智能设备的应用正在不断推动着生产效率和工作质量的提升。在这些应用场景中,对目标物体进行准确的定位、识别和控制是至关重要的一环。
2、现有方案依赖于摄像头、传感器或者激光测距仪等单一设备的数据,这些方法可能受到环境光线、噪声和干扰的影响,导致识别和定位的精度不高。而且,面对复杂的场景和多个物体,传统方法的效率和精度往往难以满足实际需求。即现有方案的准确率较低。
技术实现思路
1、本发明提供了一种医美设备的移动轨迹规划方法及系统,用于提高医美设备移动轨迹规划的准确率。
2、本发明第一方面提供了一种医美设备的移动轨迹规划方法,所述医美设备的移动轨迹规划方法包括:
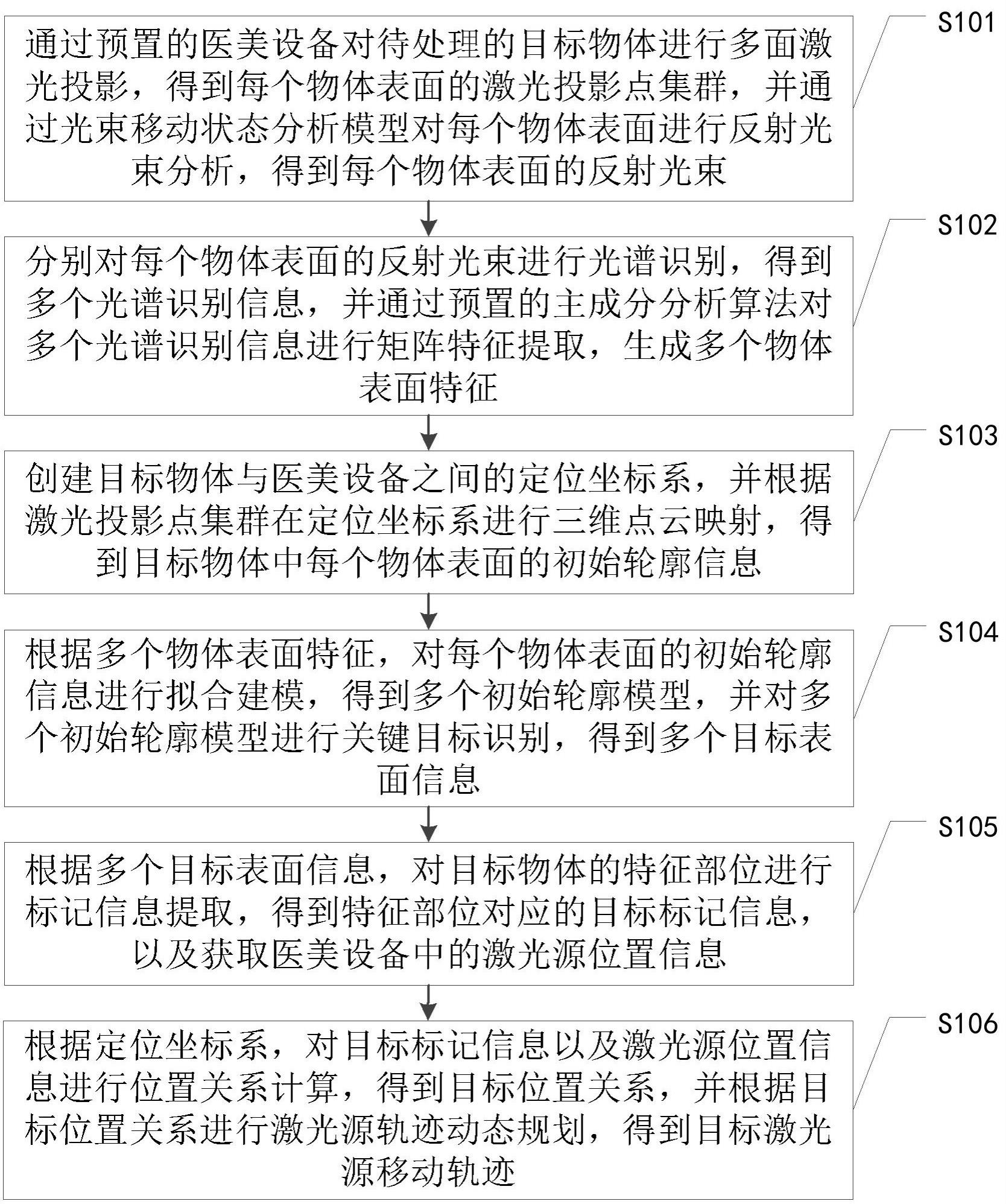
3、通过预置的医美设备对待处理的目标物体进行多面激光投影,得到每个物体表面的激光投影点集群,并通过光束移动状态分析模型对每个所述物体表面进行反射光束分析,得到每个物体表面的反射光束;
4、分别对每个物体表面的反射光束进行光谱识别,得到多个光谱识别信息,并通过预置的主成分分析算法对所述多个光谱识别信息进行矩阵特征提取,生成多个物体表面特征;
5、创建所述目标物体与所述医美设备之间的定位坐标系,并根据所述激光投影点集群在所述定位坐标系进行三维点云映射,得到所述目标物体中每个物体表面的初始轮廓信息;
6、根据所述多个物体表面特征,对每个物体表面的初始轮廓信息进行拟合建模,得到多个初始轮廓模型,并对多个所述初始轮廓模型进行关键目标识别,得到多个目标表面信息;
7、根据所述多个目标表面信息,对所述目标物体的特征部位进行标记信息提取,得到所述特征部位对应的目标标记信息,以及获取所述医美设备中的激光源位置信息;
8、根据所述定位坐标系,对所述目标标记信息以及所述激光源位置信息进行位置关系计算,得到目标位置关系,并根据所述目标位置关系进行激光源轨迹动态规划,得到目标激光源移动轨迹。
9、结合第一方面,在本发明第一方面的第一实现方式中,所述通过预置的医美设备对待处理的目标物体进行多面激光投影,得到每个物体表面的激光投影点集群,并通过光束移动状态分析模型对每个所述物体表面进行反射光束分析,得到每个物体表面的反射光束,包括:
10、通过预置的医美设备中的移动激光源,对待处理的目标物体进行多面激光投影;
11、获取每个物体表面与激光投影相交的点,得到每个物体表面的激光投影点集群;
12、在对每个物体表面进行激光投影之后,采集光束的状态变量以及测量变量,其中,所述状态变量包括光束位置、光束移动速度以及移动加速度,所述测量变量包括实际测量值;
13、根据所述状态变量以及所述测量变量,建立光束移动状态分析模型,并根据所述光束移动状态分析模型计算光束初始状态矩阵;
14、通过预置的卡尔曼滤波算法,对所述光束初始状态矩阵进行状态估计和状态更新,得到更新后的状态矩阵;
15、根据所述更新后的状态矩阵,并通过预置的光束接收器进行反射光束补偿计算,得到反射光束补偿数据,并根据所述反射光束补偿数据采集得到每个物体表面的反射光束。
16、结合第一方面,在本发明第一方面的第二实现方式中,所述分别对每个物体表面的反射光束进行光谱识别,得到多个光谱识别信息,并通过预置的主成分分析算法对所述多个光谱识别信息进行矩阵特征提取,生成多个物体表面特征,包括:
17、分别对每个物体表面的反射光束进行明暗场识别,得到第一识别信息,以及分别对每个物体表面的反射光束进行波长和能量级别分析,得到第二识别信息;
18、将所述第一识别信息和所述第二识别信息作为所述多个光谱识别信息;
19、对所述多个光谱识别信息进行标准化处理,得到多个标准光谱信息,并将所述多个标准光谱信息转换为数据矩阵,其中,所述数据矩阵的每一行代表一个样本,每一列代表一个光谱特征;
20、对所述数据矩阵进行矩阵转换,得到协方差矩阵,并对所述协方差矩阵进行特征值分解,得到特征值与对应的特征向量,其中,所述特征值表示主成分的方差,所述特征向量表示数据在主成分方向上的投影;
21、根据所述特征值的大小,选择前k个主成分,并根据前k个主成分的特征向量构建特征向量矩阵;
22、将所述数据矩阵和所述特征向量矩阵相乘,将数据映射到新的k维空间,得到特征转换后的数据矩阵,并根据所述特征转换后的数据矩阵生成多个物体表面特征。
23、结合第一方面,在本发明第一方面的第三实现方式中,所述创建所述目标物体与所述医美设备之间的定位坐标系,并根据所述激光投影点集群在所述定位坐标系进行三维点云映射,得到所述目标物体中每个物体表面的初始轮廓信息,包括:
24、基于所述多个物体表面特征设置几何特征定位模型的模型参数;
25、根据所述几何特征定位模型对所述目标物体与所述医美设备进行坐标系映射,得到定位坐标系;
26、对所述激光投影点集群进行三维点云填充,得到每个物体表面的激光投影点云;
27、根据每个物体表面的激光投影点云,生成所述目标物体中每个物体表面的初始轮廓信息。
28、结合第一方面,在本发明第一方面的第四实现方式中,所述根据所述多个物体表面特征,对每个物体表面的初始轮廓信息进行拟合建模,得到多个初始轮廓模型,并对多个所述初始轮廓模型进行关键目标识别,得到多个目标表面信息,包括:
29、根据所述多个物体表面特征,对每个物体表面的初始轮廓信息进行三维建模和拟合处理,得到多个初始轮廓模型;
30、对所述多个初始轮廓模型进行多面轮廓成像,得到多个目标轮廓模型;
31、对所述多个目标轮廓模型进行目标识别和特征提取,得到多个目标表面信息。
32、结合第一方面,在本发明第一方面的第五实现方式中,所述根据所述多个目标表面信息,对所述目标物体的特征部位进行标记信息提取,得到所述特征部位对应的目标标记信息,以及获取所述医美设备中的激光源位置信息,包括:
33、根据所述多个目标表面信息,对所述目标物体的特征部位进行特征匹配,得到所述特征部位对应的特征匹配点集群;
34、对所述特征匹配点集群进行标记信息转换,得到所述特征部位对应的目标标记信息;
35、获取所述医美设备中的激光源位置信息。
36、结合第一方面,在本发明第一方面的第六实现方式中,所述根据所述定位坐标系,对所述目标标记信息以及所述激光源位置信息进行位置关系计算,得到目标位置关系,并根据所述目标位置关系进行激光源轨迹动态规划,得到目标激光源移动轨迹,包括:
37、根据所述定位坐标系,对所述目标标记信息以及所述激光源位置信息进行位置关系计算,得到目标位置关系;
38、根据所述目标位置关系,对所述医美设备进行位姿规划,得到第一位姿信息;
39、对所述第一位姿信息和所述目标标记信息进行激光源参数补偿,得到第二位姿信息;
40、根据所述第二位姿信息,对所述医美设备进行激光源轨迹动态规划,得到目标激光源移动轨迹。
41、本发明第二方面提供了一种医美设备的移动轨迹规划系统,所述医美设备的移动轨迹规划系统包括:
42、投影模块,用于通过预置的医美设备对待处理的目标物体进行多面激光投影,得到每个物体表面的激光投影点集群,并通过光束移动状态分析模型对每个所述物体表面进行反射光束分析,得到每个物体表面的反射光束;
43、识别模块,用于分别对每个物体表面的反射光束进行光谱识别,得到多个光谱识别信息,并通过预置的主成分分析算法对所述多个光谱识别信息进行矩阵特征提取,生成多个物体表面特征;
44、创建模块,用于创建所述目标物体与所述医美设备之间的定位坐标系,并根据所述激光投影点集群在所述定位坐标系进行三维点云映射,得到所述目标物体中每个物体表面的初始轮廓信息;
45、成像模块,用于根据所述多个物体表面特征,对每个物体表面的初始轮廓信息进行拟合建模,得到多个初始轮廓模型,并对多个所述初始轮廓模型进行关键目标识别,得到多个目标表面信息;
46、提取模块,用于根据所述多个目标表面信息,对所述目标物体的特征部位进行标记信息提取,得到所述特征部位对应的目标标记信息,以及获取所述医美设备中的激光源位置信息;
47、规划模块,用于根据所述定位坐标系,对所述目标标记信息以及所述激光源位置信息进行位置关系计算,得到目标位置关系,并根据所述目标位置关系进行激光源轨迹动态规划,得到目标激光源移动轨迹。
48、结合第二方面,在本发明第二方面的第一实现方式中,所述投影模块具体用于:
49、通过预置的医美设备中的移动激光源,对待处理的目标物体进行多面激光投影;
50、获取每个物体表面与激光投影相交的点,得到每个物体表面的激光投影点集群;
51、在对每个物体表面进行激光投影之后,采集光束的状态变量以及测量变量,其中,所述状态变量包括光束位置、光束移动速度以及移动加速度,所述测量变量包括实际测量值;
52、根据所述状态变量以及所述测量变量,建立光束移动状态分析模型,并根据所述光束移动状态分析模型计算光束初始状态矩阵;
53、通过预置的卡尔曼滤波算法,对所述光束初始状态矩阵进行状态估计和状态更新,得到更新后的状态矩阵;
54、根据所述更新后的状态矩阵,并通过预置的光束接收器进行反射光束补偿计算,得到反射光束补偿数据,并根据所述反射光束补偿数据采集得到每个物体表面的反射光束。
55、结合第二方面,在本发明第二方面的第二实现方式中,所述识别模块具体用于:
56、分别对每个物体表面的反射光束进行明暗场识别,得到第一识别信息,以及分别对每个物体表面的反射光束进行波长和能量级别分析,得到第二识别信息;
57、将所述第一识别信息和所述第二识别信息作为所述多个光谱识别信息;
58、对所述多个光谱识别信息进行标准化处理,得到多个标准光谱信息,并将所述多个标准光谱信息转换为数据矩阵,其中,所述数据矩阵的每一行代表一个样本,每一列代表一个光谱特征;
59、对所述数据矩阵进行矩阵转换,得到协方差矩阵,并对所述协方差矩阵进行特征值分解,得到特征值与对应的特征向量,其中,所述特征值表示主成分的方差,所述特征向量表示数据在主成分方向上的投影;
60、根据所述特征值的大小,选择前k个主成分,并根据前k个主成分的特征向量构建特征向量矩阵;
61、将所述数据矩阵和所述特征向量矩阵相乘,将数据映射到新的k维空间,得到特征转换后的数据矩阵,并根据所述特征转换后的数据矩阵生成多个物体表面特征。
62、结合第二方面,在本发明第二方面的第三实现方式中,所述创建模块具体用于:
63、基于所述多个物体表面特征设置几何特征定位模型的模型参数;
64、根据所述几何特征定位模型对所述目标物体与所述医美设备进行坐标系映射,得到定位坐标系;
65、对所述激光投影点集群进行三维点云填充,得到每个物体表面的激光投影点云;
66、根据每个物体表面的激光投影点云,生成所述目标物体中每个物体表面的初始轮廓信息。
67、结合第二方面,在本发明第二方面的第四实现方式中,所述成像模块具体用于:
68、根据所述多个物体表面特征,对每个物体表面的初始轮廓信息进行三维建模和拟合处理,得到多个初始轮廓模型;
69、对所述多个初始轮廓模型进行多面轮廓成像,得到多个目标轮廓模型;
70、对所述多个目标轮廓模型进行目标识别和特征提取,得到多个目标表面信息。
71、结合第二方面,在本发明第二方面的第五实现方式中,所述提取模块具体用于:
72、根据所述多个目标表面信息,对所述目标物体的特征部位进行特征匹配,得到所述特征部位对应的特征匹配点集群;
73、对所述特征匹配点集群进行标记信息转换,得到所述特征部位对应的目标标记信息;
74、获取所述医美设备中的激光源位置信息。
75、结合第二方面,在本发明第二方面的第六实现方式中,所述规划模块具体用于:
76、根据所述定位坐标系,对所述目标标记信息以及所述激光源位置信息进行位置关系计算,得到目标位置关系;
77、根据所述目标位置关系,对所述医美设备进行位姿规划,得到第一位姿信息;
78、对所述第一位姿信息和所述目标标记信息进行激光源参数补偿,得到第二位姿信息;
79、根据所述第二位姿信息,对所述医美设备进行激光源轨迹动态规划,得到目标激光源移动轨迹。
80、本发明第三方面提供了一种计算机设备,包括:存储器和至少一个处理器,所述存储器中存储有指令;所述至少一个处理器调用所述存储器中的所述指令,以使得所述计算机设备执行上述的医美设备的移动轨迹规划方法。
81、本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述的医美设备的移动轨迹规划方法。
82、本发明提供的技术方案中,通过光束移动状态分析模型对每个所述物体表面进行反射光束分析,得到每个物体表面的反射光束;通过主成分分析算法对多个光谱识别信息进行矩阵特征提取,生成多个物体表面特征;进行三维点云映射,得到目标物体中每个物体表面的初始轮廓信息;进行拟合建模,得到多个初始轮廓模型并进行关键目标识别,得到多个目标表面信息;进行标记信息提取,得到特征部位的目标标记信息;对目标标记信息以及激光源位置信息进行位置关系计算,得到目标位置关系并进行激光源轨迹动态规划,得到目标激光源移动轨迹,本发明通过光谱识别及特征转换,从反射光束中提取了多个物体表面特征,使得物体的定位和匹配更加准确和可靠。并且本发明通过标记信息的提取和位置关系计算,能够快速确定目标的位置和方向信息,进而提高了光学定位检测的准确率,以及提高了激光源移动轨迹的规划效率。通过多面激光投影和光谱识别技术,可以实现对目标物体的高精度定位和识别。准确的目标物体定位可以确保医美设备在进行处理、操作或交互时的准确位置,从而提高生产过程中的精度和稳定性。医美设备可以同时对目标物体的多个表面进行处理,不再局限于单一视角。这使得医美设备可以在更短的时间内完成对目标物体的识别和处理,从而大幅提高工作效率,进而提高了医美设备移动轨迹规划的准确率。
- 还没有人留言评论。精彩留言会获得点赞!