基于模式动态切换的充电监测保护方法及保护系统与流程
本发明涉及数据处理技术,尤其涉及一种基于模式动态切换的充电监测保护方法及保护系统。
背景技术:
1、随着新能源汽车的普及,相应的对新能源汽车进行充电的充电桩的分布也更为广泛,充电桩是指为电动汽车提供能量补充的充电装置,其功能类似于加油站里面的加油机,可以固定在地面或墙壁,安装于室外停车场、商场和居民小区停车场内等,当车辆进行充电时,管理人员需要确保车辆的安全,但由于这些区域多在室外且存放车辆较多,因此容易出现车辆的损伤和安全隐患,所以需要对充电桩的停车区域进行监测以便后续提供证据。
2、现有技术中,主要通过在充电桩的停车区域安装监控,通过人工的方式实时观察充电桩的可停车区域内车辆的监控画面,从而避免车辆出现损伤,或者在出现事故时通过人工调取当天的视频进行逐帧观察从而确定导致事故的原因,但无法对充电桩的可停车区域进行自动监测并确定监测结果。
3、因此,如何针对可停车区域的车辆进行多维度的自动监测,以协助人员得到自动的监测结果成为亟待解决的问题。
技术实现思路
1、本发明实施例提供一种基于模式动态切换的充电监测保护方法及保护系统,可以针对可停车区域的车辆进行多维度的自动监测,以协助人员得到自动的监测结果。
2、本发明实施例的第一方面,提供一种基于模式动态切换的充电监测保护方法,包括:
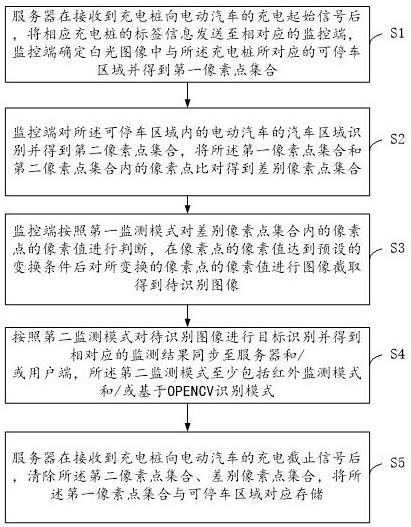
3、服务器在接收到充电桩向电动汽车的充电起始信号后,将相应充电桩的标签信息发送至相对应的监控端,监控端确定白光图像中与所述充电桩所对应的可停车区域并得到第一像素点集合;
4、监控端对所述可停车区域内的电动汽车的汽车区域识别并得到第二像素点集合,将所述第一像素点集合和第二像素点集合内的像素点比对得到差别像素点集合;
5、监控端按照第一监测模式对差别像素点集合内的像素点的像素值进行判断,在像素点的像素值达到预设的变换条件后对所变换的像素点的像素值进行图像截取得到待识别图像;
6、按照第二监测模式对待识别图像进行目标识别并得到相对应的监测结果同步至服务器和/或用户端,所述第二监测模式至少包括红外监测模式和/或基于opencv识别模式;
7、服务器在接收到充电桩向电动汽车的充电截止信号后,清除所述第二像素点集合、差别像素点集合,将所述第一像素点集合与可停车区域对应存储。
8、可选地,在第一方面的一种可能实现方式中,所述服务器在接收到充电桩向电动汽车的充电起始信号后,将相应充电桩的标签信息发送至相对应的监控端,监控端确定白光图像中与所述充电桩所对应的可停车区域并得到第一像素点集合,包括:
9、监控端对其拍摄的白光图像中为预设像素值的像素点识别得到相对应的监测区域;
10、监控端根据所接收充电桩的标签信息,确定相对应的监测区域作为目标监测区域;
11、获取所述目标监测区域内的像素点得到与所述充电桩所对应的可停车区域,统计可停车区域的所有像素点的坐标得到第一像素点集合。
12、可选地,在第一方面的一种可能实现方式中,所述监控端对所述可停车区域内的电动汽车的汽车区域识别并得到第二像素点集合,根据所述第一像素点集合、第二像素点集合得到第一像素点集合、第二像素点集合之间的差别像素点集合,包括:
13、确定所述目标监测区域所对应的原始图像的原始像素点,将目标监测区域所对应的当前图像的当前像素点与原始像素点比对确定区别像素点;
14、获取所有区别像素点所组成的区域作为与所述充电桩所对应的汽车区域,统计汽车区域的所有像素点的坐标得到第二像素点集合;
15、将所述第二像素点集合内的像素点的坐标与第一像素点集合内像素点的坐标比对,确定第一像素点集合内存在、第二像素点集合内不存在的坐标对应的像素点得到差别像素点集合;
16、基于与标签信息相对应的预存图像信息空间对第一像素点集合、第二像素点集合、差别像素点集合存储。
17、可选地,在第一方面的一种可能实现方式中,所述监控端按照第一监测模式对差别像素点集合内的像素点的像素值进行判断,在像素点的像素值达到预设的变换条件后对所变换的像素点的像素值进行图像截取得到待识别图像,包括:
18、获取在得到差别像素点集合的第一时刻时,差别像素点集合的像素点的第一像素值;
19、将第二时刻时差别像素点集合的像素点的第二像素值与相同坐标的像素点的第一像素值比对,若判断同一个坐标的像素点的第一像素值和第二像素值的差值大于预设值,则将相应的像素点作为变换像素点;
20、获取所有变换像素点的变换坐标,若变换坐标达到预设的变换条件后对所变换的像素点的像素值进行图像截取得到待识别图像。
21、可选地,在第一方面的一种可能实现方式中,所述获取所有变换像素点的变换坐标,若变换坐标达到预设的变换条件后对所变换的像素点的像素值进行图像截取得到待识别图像,包括:
22、将所有通过变换像素点直接相邻或间隔相邻的变换像素点统计得到变换像素点集合,统计每个变换像素点集合内的变换像素点的变换数量;
23、若所述变换数量大于等于预设变化数值,则判断相应变换像素点集合内的变换坐标达到预设的变换条件;
24、根据达到变换条件的变换像素点集合的变换坐标对所变换的像素点进行采集,截取得到待识别图像。
25、可选地,在第一方面的一种可能实现方式中,还包括:
26、若所述变换数量小于预设变化数值,则判断相应变换像素点集合内的变换坐标未达到预设的变换条件,不进行图像截取。
27、可选地,在第一方面的一种可能实现方式中,所述按照第二监测模式对待识别图像进行目标识别并得到相对应的监测结果同步至服务器和/或用户端,所述第二监测模式至少包括红外监测模式和/或基于opencv识别模式,包括:
28、基于红外监测模式中的采集模块获取待识别图像中所对应像素点的红外像素值并计算得到红外像素均值;
29、若所述红外像素均值大于等于预设像素均值则得到第一生物的监测结果,并确定待识别图像的完整图像,基于opencv对所述完整图像识别得到相对应的监测结果同步至服务器和/或用户端。
30、可选地,在第一方面的一种可能实现方式中,还包括:
31、若所述红外像素均值小于预设像素均值则得到第二生物的监测结果,不再基于opencv识别。
32、可选地,在第一方面的一种可能实现方式中,所述若所述红外像素均值大于等于预设像素均值则得到第一生物的监测结果,并确定待识别图像的完整图像,基于opencv对所述完整图像识别得到相对应的监测结果,包括:
33、若所述红外像素均值大于等于预设像素均值,则对监控端所拍摄整体的红外光图像进行二值化处理得到二值化图像;
34、根据待识别图像中像素点的坐标确定二值化图像中相对应的二值化像素点,确定与二值化像素点直接相邻或通过其他白色像素点间接相邻的所有白色像素点得到二值化像素点集合;
35、根据二值化像素点集合的所有像素点得到待识别图像的完整图像,基于opencv对所述完整图像识别得到相对应的监测结果。
36、可选地,在第一方面的一种可能实现方式中,所述根据二值化像素点集合的所有像素点得到待识别图像的完整图像,基于opencv对所述完整图像识别得到相对应的监测结果,包括:
37、调取监测端所拍摄完整的白光图像,根据所述二值化像素点集合内的坐标确定白光图像内相应的白光像素点得到完整图像;
38、基于opencv对所述完整图像识别得到相对应的监测结果。
39、可选地,在第一方面的一种可能实现方式中,所述服务器在接收到充电桩向电动汽车的充电截止信号后,清除所述第二像素点集合、差别像素点集合,将所述第一像素点集合与可停车区域对应存储,包括:
40、服务器在接收到充电桩向电动汽车的充电截止信号后,将预存图像信息空间内的第二像素点集合、差别像素点集合删除;
41、将先前所记录的第一像素点集合与可停车区域存储至图像信息空间内,以使第一像素点集合与可停车区域下次被直接调取。
42、本发明实施例的第二方面,提供一种基于模式动态切换的充电监测保护系统,包括:
43、接收模块,用于使服务器在接收到充电桩向电动汽车的充电起始信号后,将相应充电桩的标签信息发送至相对应的监控端,监控端确定白光图像中与所述充电桩所对应的可停车区域并得到第一像素点集合;
44、识别模块,用于使监控端对所述可停车区域内的电动汽车的汽车区域识别并得到第二像素点集合,将所述第一像素点集合和第二像素点集合内的像素点比对得到差别像素点集合;
45、判断模块,用于使监控端按照第一监测模式对差别像素点集合内的像素点的像素值进行判断,在像素点的像素值达到预设的变换条件后对所变换的像素点的像素值进行图像截取得到待识别图像;
46、同步模块,用于按照第二监测模式对待识别图像进行目标识别并得到相对应的监测结果同步至服务器和/或用户端,所述第二监测模式至少包括红外监测模式和/或基于opencv识别模式;
47、存储模块,用于使服务器在接收到充电桩向电动汽车的充电截止信号后,清除所述第二像素点集合、差别像素点集合,将所述第一像素点集合与可停车区域对应存储。
48、本发明实施例的第三方面,提供一种电子设备,包括:存储器、处理器以及计算机程序,所述计算机程序存储在所述存储器中,所述处理器运行所述计算机程序执行本发明第一方面及第一方面各种可能涉及的所述方法。
49、本发明实施例的第四方面,提供一种存储介质,所述存储介质中存储有计算机程序,所述计算机程序被处理器执行时用于实现本发明第一方面及第一方面各种可能涉及的所述方法。
50、本发明的有益效果如下:
51、1、本发明会对充电桩的可停车区域进行多维度监测从而自动生成相应的监测结果。本发明通过2种监测模式切换对充电桩的可停车区域进行自动监测,第一监测模式用于监测差别像素点集合中像素点的像素值进行判断,当到达变化条件后,则会对发生变化的图像进行截取得到待识别图像,随后通过第二监测模式中的红外监测模式和/或opencv识别模式对待识别图像进行自动识别得到监测结果,使得本发明在到达变换条件后会自动会变化的图像进行截取并识别,从而得到相应的监测结果。
52、2、本发明会依据第一监测模式对进入可停车区域内的物体进行自动监测,并截取相应的图片得到待识别图像,方便后续对待识别图像进行识别得到相应的监测结果。本发明会利用监控拍摄的白光图像获取停车线区域内的所有像素点得到第一像素点集合,并将停车后的当前图像的当前像素点与停车前原始图像的原始像素点进行比对,确定车辆对应的第二像素点集合,根据第一像素点集合和第二像素点集合确定处于可停车区域内但不与车辆相关的差别像素点,即2者的差集,并且每个停车区域对应一个预存图像信息空间对第一像素点集合、第二像素点集合、差别像素点集合存储,后续直接提取使用,无需进行多次识别处理,当判断出差别像素点集合中像素点的像素值变化较大且变化数量大于预设变化数值,则说明有物体进入,则会对该变化部分进行截取,得到待识别图像,使得本发明可以自动对进入停车区域且靠近车辆的物体进行自动监控。
53、3、本发明会依据第二监测模式对待识别图像进行生物识别,当判断是第一生物时,会确定该第一生物的完整图像,随后对该完整图像进行识别得到相应的识别结果,使得本发明可以自动对进入可停车区域内的物体进行识别并自动生成相应的监测结果,无需人员进行全天候的观察,并且会将第一像素点集合与可停车区域存储至图像信息空间内,后续进行监控时无需再对停车区域内的像素点进行提取,减少了数据处理量。本发明基于第二监测模式对待识别图像进行2个维度的识别,首先利用红外监测模式查看该物体是否为第一生物,如果不是,则无需进行后续的opencv识别,如果是由于仅对停车区域内的第一生物的部分图像进行截取,因此本发明会利用整体的红外光图像和二值化处理确定该物体对应的二值化像素点集合从而得到完成图像,随后利用二值化像素点集合确定白光图像内相应的白光像素点得到完整图像,并利用opencv进行自动识别得到相应的监测结果,本发明可以自动得到相应的监测结果,无需人员进行实时监测。
- 还没有人留言评论。精彩留言会获得点赞!