基于自闭合正交多边形的遥感建筑物样本快速采集方法
本发明属于地理信息系统、遥感信息应用、人工智能应用方法的交叉领域,尤其涉及一种基于自闭合正交多边形的遥感建筑物样本快速采集方法。
背景技术:
1、高分辨率遥感影像语义识别是当前ai应用的重要方向之一。遥感建筑物语义识别是高分辨率遥感影像语义识别中典型应用场景之一,可广泛应用于城市扩张监测、城市调查监测、lod1级实景三维生成等。受限于遥感影像的“同物异谱、同谱异物”及“地理空间是巨型复杂系统”,遥感建筑物语义识别的泛化能力、精确度极其依赖于遥感建筑物标注样本的数据规模,因此,构建大规模的遥感建筑物标注样本是提升遥感建筑物语义识别质量的关键。
2、当前,构建大规模的遥感建筑物标注样本均依赖于交互式人工采集,其面临着采集效率不高、高分辨率遥感影像数据体量大、分发管理协同难度大,极大制约了构建大规模的遥感建筑物标注样本构建的效率,极大增加了构建大规模的遥感建筑物标注样本的生产成本。同时,受限于绝大多数建筑物的形状的正交规则性,传统基于gis软件绘制多边形形式的标注图形难以满足遥感建筑物标注样本的形状要求,从而极大程度限制了采集的遥感建筑物标注样本规范性。
3、因此,研制一种基于在线地图服务模式的、可支持自动正交辅助、自动闭合的遥感建筑物标注样本采集方法,亟待突破。
技术实现思路
1、发明目的:本发明的目的在于提供一种基于自闭合正交多边形的遥感建筑物样本快速采集方法,支持自动正交辅助、自动闭合的遥感建筑物标注样本采集,大幅度提升人工采集效率,大幅度提升遥感建筑物标注样本的正交规范性。
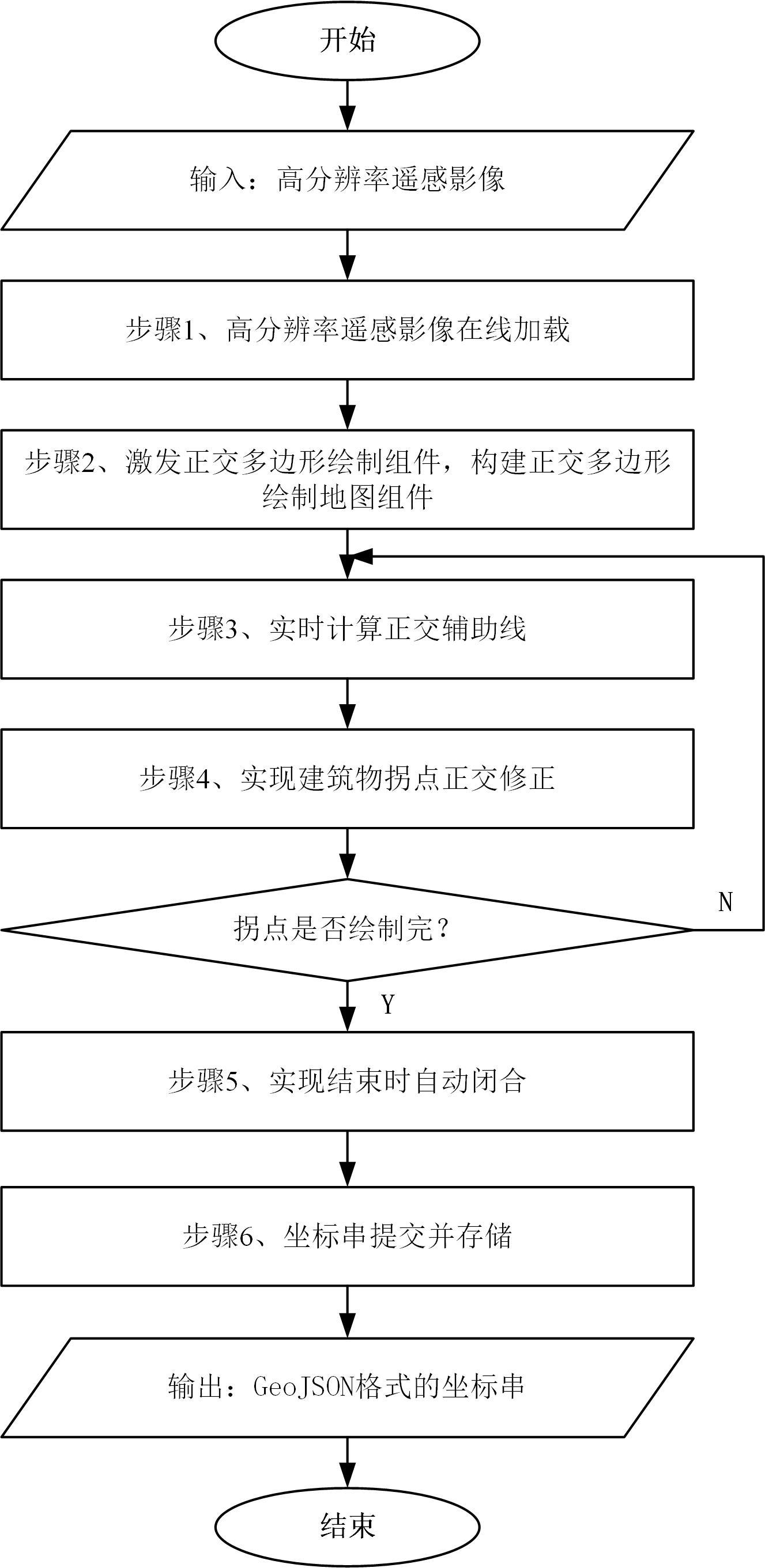
2、技术方案:本发明的一种基于自闭合正交多边形的遥感建筑物样本快速采集方法,实现了高分辨率遥感影像在线加载与显示;构建了正交多边形绘制地图组件;支持实时计算正交辅助线生成;实现建筑物拐点正交修正;支持结束时自动正交闭合;支持坐标串提交并存储。具体步骤如下:
3、步骤1、高分辨率遥感影像在线加载:将影像通过ogc wmts服务形式,在浏览器前端,通过leaflet形式加载并显示;
4、步骤2、激发正交多边形绘制组件:构建正交多边形绘制地图组件,并激活地图组件;
5、步骤3、实时计算正交辅助线:延房屋屋顶长边,绘制初始建筑物边线,完成后,调取正交辅助线算符,实时生成已有线的正交辅助线;
6、步骤4、实现建筑物拐点正交修正:绘制建筑物拐点,经正交拐点修正算符,得到正交修正后建筑物拐点,并形成过程建筑物边线,重复所述建筑物拐点正交修正步骤,直至所有需采集的建筑物拐点完成采集;
7、步骤5、实现结束时自动闭合:在地图组件中调取自动闭合算符,自动闭合形成遥感建筑物正交多边形标注图形,得到建筑物样本标注;
8、步骤6、坐标串提交并存储:在浏览器端,将遥感建筑物正交多边形标注图形生成坐标串,请求webservice服务,提交并存储至数据库中,即完成建筑物样本的快速采集。
9、进一步的,步骤1具体包括如下步骤:
10、步骤1.1、引入leaflet库:在html文件中引入leaflet库的css和javascript文件;
11、步骤1.2、创建leaflet地图:在javascript中,创建一个leaflet地图并将其显示在指定的<div>元素中;
12、步骤1.3、添加地图图层:通过leaflet的l.tilelayer方法添加wmts图层,l.tilelayer方法的关键参数包括:url模板及options;其中,url模板:必需参数,用于指定瓦片图层的url,url模板中使用占位符{z}、{x}和{y}来代表缩放级别、瓦片的列索引和行索引,leaflet会根据当前地图的缩放级别和视图范围动态加载相应的瓦片;options为一个包含各种选项的javascript对象,可设置瓦片图层的行为和样式。
13、进一步的,步骤2具体包括如下步骤:
14、步骤2.1、创建控件类:创建一个控件类,所述控件类继承自l.control,控件类包含控件的dom元素和其他逻辑;
15、步骤2.2、添加控件到地图:在javascript中,通过mycontrol.addto(map)将正交多边形绘制控件添加到地图上;
16、步骤2.3、样式和交互:通过在onadd方法中创建控件的dom元素,并添加样式和交互,自定义控件类中的onadd方法在控件被添加到地图上时被调用,而onremove方法在控件从地图上移除时被调用,在onremove方法中添加控件从地图上移除时的清理逻辑。
17、进一步的,步骤3(图2)具体包括如下步骤:
18、步骤3.1、ab直线方程表示:在平面坐标系内,两点a和b之间的直线以由点斜式方程表示,直线的点斜式方程表示为:,其中是直线斜率,;
19、步骤3.2、计算正交辅助线方程:要找到与直线ab垂直的直线cd,找到直线ab的斜率的相反数,并通过b来确定正交辅助线方程,正交辅助线垂直斜率为,通过点b构建与直线ab垂直的直线cd,使用点斜式方程来表示cd:;
20、步骤3.3、计算正交辅助线两端点坐标:已知正交辅助线cd方程,在实际绘制时,需要以线段表示,因此需找到其两个端点坐标;设定量端点距离中心点b为,计算c、d坐标,以d点为例,根据正交辅助线cd方程,将点d的坐标代入方程得;同时,已知点d与点b之间距离为,得距离公式: ,得到方程组:
21、;
22、通过消元法,变换为含单个未知变量的一元二次函数,以为例,消元后得到:
23、;
24、通过牛顿法,求解,得两个值,分别代表两端点坐标;
25、步骤3.4、绘制cd辅助线:将线两个端点绘制,然后连线,设置虚线线型和颜色,形成正交辅助线。
26、进一步的,步骤3.3中,所述牛顿法是一种数值逼近方法,用于求解方程的根,牛顿法是通过选择一个初始近似解,并使用该近似解和函数的导数来构造一个切线,然后通过切线与x轴的交点作为新的近似解,这个过程会不断迭代,直到找到满足精度要求的根(图3);具体包括:
27、(1)选择一个初始近似解;
28、(2)计算函数在处的值;
29、(3)计算函数在处的导数;
30、(4)使用切线方程,将切线与x轴求交点,得到新的近似解;检查新的近似解与旧的近似解之间的差异,如果满足精度要求,则停止迭代并将作为方程的近似解;否则,将作为新的近似解,回到牛顿法步骤(2)继续迭代;直到找到满足精度要求的根或达到最大迭代次数。
31、进一步的,步骤4具体包括如下步骤:
32、步骤4.1、绘制e’点(图4步骤4.1):样本标注人员采集建筑物拐点,通过鼠标左击,绘制建筑物拐点e’,得坐标e’,此时不满足正交要求,需进行正交拐点修正;
33、步骤4.2、正交拐点e修正计算(图4步骤4.1):过e’点,构建ab的平行线a’b’,a’b’方程可描述为:,求取a’b’与cd的交点e,实现e’正交改正至e,a’b’与cd两直线方程可表示为:
34、;
35、取交点得:
36、;
37、其中,表示正交辅助线垂直斜率,表示直线斜率。
38、绘制e点(图4步骤4.3),绘制be直线。
39、进一步的,步骤5(图5)具体包括如下步骤:
40、步骤5.1、自动闭合算符首先需明确起始线与终止线的平行和垂直关系:通过已采集线段的奇数偶数关系来确定起始线与终止线的平行和垂直关系,若已采集线段数为奇数,则起始线与终止线为平行关系;若已采集线段数为偶数,则起始线与终止线为垂直关系;
41、步骤5.2、自动闭合算符中,其次需计算出闭合点,闭合点每次都会存在两种情况,每种情况又包括两种之情况,分别讨论如下:
42、当起始线与终止线为垂直关系,即自闭合情况a:(1)、子情况a2和a4情况,ab延长线与uv延长线求交,简称“延延求交”,得到候选闭合点m;(2)、子情况a1和a3情况,ab垂直线与uv垂直线求交,简称“垂垂求交”,得到候选闭合点m;
43、当起始线与终止线为平行关系即,自闭合情况b:(1)、子情况b2和b4情况,ab垂直线与uv延长线求交,简称“垂延求交”,得到候选闭合点m;(2)、子情况b1和b3情况,ab延长线与uv垂直线求交,简称“延垂求交”,得到候选闭合点m;
44、步骤5.3、计算多边形面积,保留面积最大情况下的最优闭合点;起始线与终止线为垂直关系、起始线与终止线为平行关系都会分别产生两个交点,从两个交点中需要保留一个最优闭合点,保留的原则为:比较两种子情况的多边形面积大小关系,遵循“面积大的情况更符合视觉推理”基本原则;此处给出计算多边形的面积的方法,即简单多边形通过坐标串完成多边形面积计算,假设多边形顶点坐标依次为 ,基于向量叉乘的性质得多边形面积:
45、;
46、该公式绝对值旨在确保结果为正数。
47、进一步的,步骤6中,所述坐标串的格式为geojson格式。
48、进一步的,所述数据库为postgis数据库。
49、有益效果:与现有技术相比,本发明具有如下显著优点:
50、(1)支持在线地图服务模式下的多人协同标注采集,无需进行高分辨遥感影像分发,可有效提升数据管理效率;(2)支持自动正交辅助、自动闭合的遥感建筑物标注样本采集,大幅度提升人工采集效率,大幅度提升遥感建筑物标注样本的正交规范性。(3)本技术可应用于多种分辨率的建筑物采集,将为构建大规模遥感建筑物标注样本提供快速采集,综合效率提升14%,样本正交规则化综合质量大幅度提升,提升遥感建筑物语义识别泛化性和精确度,减少数据标注不足对语义识别的瓶颈问题。
- 还没有人留言评论。精彩留言会获得点赞!