基于机器视觉的MOSFET蚀刻缺陷检测方法与流程
本技术涉及图像处理领域,具体涉及基于机器视觉的mosfet蚀刻缺陷检测方法。
背景技术:
1、mosfet是一种金属氧化物半导体场效应管。半导体制作工艺有几种处理方式,如化学处理、机器处理和物理处理等,本发明研究半导体制作过程中的蚀刻,即用化学处理的方式完成mosfet的制作。在对mosfet蚀刻过程中,由于工艺参数不一致、控制不当等因素,会在其表面形成槽口深度不均匀、表面不光滑、氧化物或化学物质等残留在材料表面等缺陷,这些缺陷会影响器件的性能和可靠性。
2、传统的图像处理技术在使用k-means算法对图像中的槽口不均匀处缺陷进行聚类时,可以对槽口不均匀处的缺陷边缘进行聚类,但是槽口不均匀处的缺陷的内部与mosfet蚀刻正常区域相似,都是较为光滑的平面,在聚类时容易误聚成mosfet蚀刻正常区域,这就导致算法容易出现欠分割现象,从而使得缺陷检测结果并不准确。
3、综上所述,本发明提出基于机器视觉的mosfet蚀刻缺陷检测方法,采用ccd相机采集mosfet蚀刻图像,结合槽口不均匀缺陷边缘及缺陷内部像素点的分布特征,进行k-means聚类,完成mosfet蚀刻缺陷检测。
技术实现思路
1、为了解决上述技术问题,本发明提供基于机器视觉的mosfet蚀刻缺陷检测方法,以解决现有的问题。
2、本发明的基于机器视觉的mosfet蚀刻缺陷检测方法采用如下技术方案:
3、本发明一个实施例提供了基于机器视觉的mosfet蚀刻缺陷检测方法,该方法包括以下步骤:
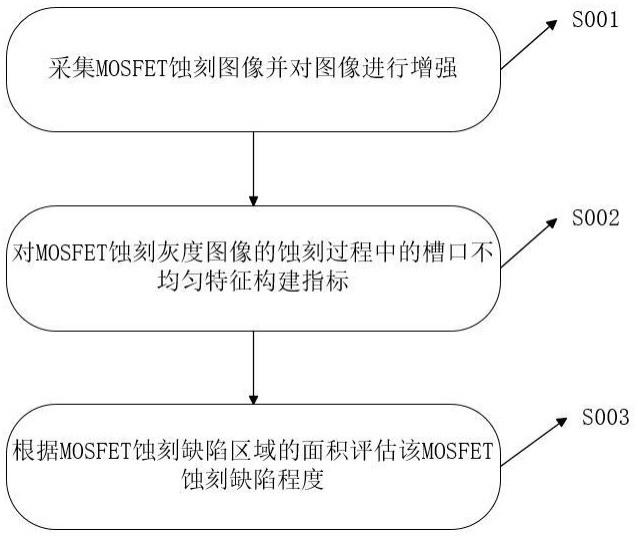
4、采集mosfet蚀刻图像;对mosfet蚀刻图像预处理得到mosfet蚀刻灰度图像;
5、根据各像素点八邻域内像素点的灰度信息及方向信息得到八邻域内各像素点的灰度方向向量;根据各像素点八邻域内像素点的灰度方向向量得到各像素点的递变规律显著走势;将各像素点的递变规律显著走势映射得到灰度映射向量;根据各像素点邻域窗口内像素点的灰度映射向量得到各像素点的槽口区域疑似度;根据各像素点的槽口区域疑似度得到各像素点的槽口缺陷疑似度;
6、根据各像素点的槽口缺陷疑似度得到槽口缺陷特征图像;根据槽口缺陷特征图像得到槽口缺陷点簇;根据mosfet蚀刻灰度图像中mosfet区域像素点数量及槽口缺陷特征图像中的槽口缺陷点簇的数量得到mosfet蚀刻缺陷程度;
7、根据mosfet蚀刻缺陷程度及缺陷阈值,完成mosfet蚀刻缺陷检测。
8、优选的,根据各像素点八邻域内像素点的灰度信息及方向信息得到八邻域内各像素点的灰度方向向量的具体方法为:
9、对于mosfet蚀刻灰度图像中任意一个像素点,将像素点作为中心像素点获取对应的八邻域,将中心像素点作为起点、将八邻域内的每个像素点作为终点,将起点与每一个终点构成的连接向量作为每一个终点对应的灰度方向向量,灰度方向向量的方向为起点和终点之间灰度值增大的方向,灰度方向向量的模为起点和终点之间灰度值差值的绝对值。
10、优选的,根据各像素点八邻域内像素点的灰度方向向量得到各像素点的递变规律显著走势的表达式为:
11、
12、式中,是第个像素点的递变规律显著走势,为第个像素点对应八邻域内八个灰度方向向量模长的均值,是第个像素点对应八邻域内像素点的数量,是第个像素点对应八邻域内第个像素点的灰度方向向量。
13、优选的,将各像素点的递变规律显著走势映射得到灰度映射向量的具体方法为:
14、对于mosfet蚀刻灰度图像中的任意一个像素点,分别获取像素点递变规律显著走势与八邻域方向之间的夹角,将像素点递变规律显著走势映射在八邻域方向上夹角最小的方向作为像素点的灰度映射向量的方向,灰度映射向量的模为像素点的递变规律显著走势的模;
15、如果出现像素点的递变规律显著走势与八邻域方向中的其中两个方向都有相同的最小夹角,取顺时针方向最近的八邻域方向作为映射后的灰度映射向量的方向。
16、优选的,根据各像素点邻域窗口内像素点的灰度映射向量得到各像素点的槽口区域疑似度的表达式为:
17、
18、式中,为求括号内两个向量夹角的余弦值,为第个像素点所取邻域内出现的灰度映射向量方向最多的向量方向,为第个像素点所取邻域内出现的灰度映射向量方向最多的的个数,为第个像素点所取邻域内像素点的数量,为第个像素点所取邻域内的第个像素点的递变规律显著走势,为第个像素点所取邻域的槽口区域疑似度。
19、优选的,根据各像素点的槽口区域疑似度得到各像素点的槽口缺陷疑似度的表达式为:
20、
21、式中,为区域疑似度修正系数,用来修正邻域窗口内的槽口缺陷疑似度,为方向丰富度修正系数,用来修正邻域窗口内出现多种灰度映射向量情况下的槽口缺陷疑似度,为归一化函数,为第个像素点所取邻域内的槽口区域疑似度,为第个像素点所取邻域内所有的灰度映射向量的方差,为第个像素点所取邻域内所有的灰度映射向量求和后得到的向量模长,为第个像素点所取邻域内所有的灰度映射向量模长的均值,为第个像素点所取邻域内的槽口缺陷疑似度。
22、优选的,根据各像素点的槽口缺陷疑似度得到槽口缺陷特征图像的具体方法为:
23、对于任意一个像素点,获取像素点的槽口缺陷疑似度,将槽口缺陷疑似度代替像素点的灰度值,遍历所有像素点,将替换后的图像作为槽口缺陷特征图像。
24、优选的,根据槽口缺陷特征图像得到槽口缺陷点簇的具体方法为:
25、利用k-means聚类算法获取槽口缺陷特征图像中像素点的聚类簇,分别获取每个聚类簇内像素点的槽口缺陷疑似度的均值,将槽口缺陷疑似度均值最大值对应的聚类簇作为槽口缺陷点簇。
26、优选的,根据mosfet蚀刻灰度图像中mosfet区域像素点数量及槽口缺陷特征图像中的槽口缺陷点簇的数量得到mosfet蚀刻缺陷程度,具体方法为:
27、将mosfet蚀刻灰度图像中mosfet区域的像素点数量记为第一数量,将槽口缺陷特征图像中的槽口缺陷点簇数量记为第二数量,将第二数量与第一数量的比值记作mosfet蚀刻缺陷程度。
28、优选的,根据mosfet蚀刻缺陷程度及缺陷阈值,完成mosfet蚀刻缺陷检测的具体方法为:
29、设定缺陷阈值,将mosfet蚀刻缺陷程度与缺陷阈值比较,当mosfet蚀刻缺陷程度大于缺陷阈值,将mosfet蚀刻图像记为缺陷图像。
30、本发明至少具有如下有益效果:
31、本发明方法可实现对mosfet蚀刻过程中出现的槽口不均匀缺陷的检测,相比于传统的k-means聚类检测方法,本发明结合槽口不均匀缺陷的边缘具有的灰度渐变规律的特征,构建得到缺点边缘点的递变规律显著走势,有助于将槽口边缘与槽口缺陷边缘区分开来,提高了对边缘点检测精度;
32、同时,再结合区域内部缺陷边缘点的灰度渐变方向来协助判断缺陷内部的像素点,将缺陷内部像素点与mosfet表面正常的像素点区分开来,避免将缺陷内部纹理光滑平坦的缺陷区域识别为mosfet光滑表面区域,提升了k-means聚类算法的准确率。
- 还没有人留言评论。精彩留言会获得点赞!