一种大规模微观交通仿真方法及装置与流程
本说明书涉及计算机,尤其涉及一种大规模微观交通仿真方法及装置。
背景技术:
1、随着城市化进程的加快,城市的交通网络日益复杂。为了有效地制订城市的交通发展规划,有必要对城市交通网络进行建模以及复现其交通状态。交通仿真可以为交通设计、交通规划、交通监测、交通需求管理提供科学支撑,因此如何构建准确的交通仿真模型,并依据该交通仿真模型进行交通仿真是一个重要的研究方向。
2、基于此,本说明书提供一种大规模微观交通仿真方法。
技术实现思路
1、本说明书提供一种大规模微观交通仿真方法及装置,以部分的解决现有技术存在的上述问题。
2、本说明书采用下述技术方案:
3、本说明书提供了一种大规模微观交通仿真方法,包括:
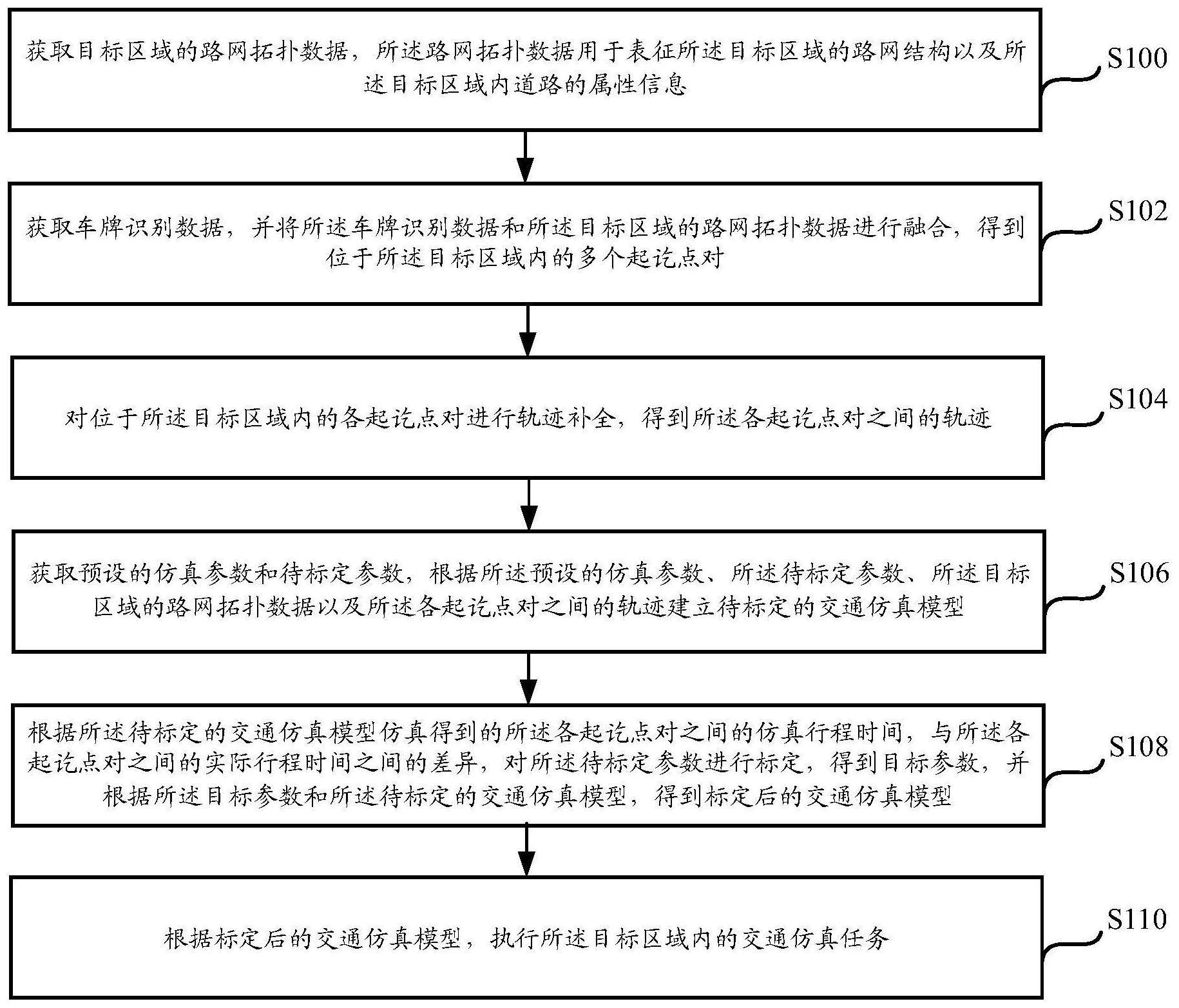
4、获取目标区域的路网拓扑数据,所述路网拓扑数据用于表征所述目标区域的路网结构以及所述目标区域内道路的属性信息;
5、获取车牌识别数据,并将所述车牌识别数据和所述目标区域的路网拓扑数据进行融合,得到位于所述目标区域内的多个起讫点对;
6、对位于所述目标区域内的各起讫点对进行轨迹补全,得到所述各起讫点对之间的轨迹;
7、获取预设的仿真参数和待标定参数,根据所述预设的仿真参数、所述待标定参数、所述目标区域的路网拓扑数据以及所述各起讫点对之间的轨迹建立待标定的交通仿真模型;
8、根据所述待标定的交通仿真模型仿真得到的所述各起讫点对之间的仿真行程时间,与所述各起讫点对之间的实际行程时间之间的差异,对所述待标定参数进行标定,得到目标参数,并根据所述目标参数和所述待标定的交通仿真模型,得到标定后的交通仿真模型;
9、根据标定后的交通仿真模型,执行所述目标区域内的交通仿真任务。
10、可选地,将所述车牌识别数据和所述目标区域的路网拓扑数据进行融合之前,所述方法还包括:
11、获取多个道路等级分别对应的参考属性信息;
12、从所述目标区域的路网拓扑数据中提取位于所述目标区域内的各道路的属性信息;
13、根据所述各道路等级分别对应的参考属性信息,对所述各道路的属性信息进行修正,得到标定后的所述各道路的目标属性信息;
14、根据所述目标区域的路网拓扑数据,确定位于所述目标区域内的各交叉口;
15、对所述目标区域的路网拓扑数据中所述各交叉口的信号配时参数进行调整,得到调整后的所述各交叉口的目标信号配时参数;
16、根据所述各道路的目标属性信息和所述各交叉口的目标信号配时参数,对所述目标区域的路网拓扑数据进行更新,得到更新后的所述目标区域的路网拓扑数据;
17、将所述车牌识别数据和所述目标区域的路网拓扑数据进行融合,具体包括:
18、将所述车牌识别数据和更新后的所述目标区域的路网拓扑数据进行融合。
19、可选地,所述车牌识别数据是由部署在所述目标区域内的多个电警设备预先检测多个车辆的车牌号得到的;
20、将所述车牌识别数据和所述目标区域的路网拓扑数据进行融合,得到位于所述目标区域内的多个起讫点对,具体包括:
21、将所述车牌识别数据指示的各电警设备的位置,和基于所述目标区域的路网拓扑数据确定的各道路交叉口的位置进行融合,从部署在所述目标区域内的各电警设备中筛选出部署在所述目标区域的各道路交叉口的各目标电警设备;
22、根据所述各目标电警设备在所述目标区域内的位置,以及所述车牌识别数据中各车牌的被检测时间,确定所述各车牌号分别对应的各出行轨迹;
23、根据所述各车牌号分别对应的各出行轨迹,确定位于所述目标区域内的多个起讫点对。
24、可选地,将所述车牌识别数据指示的所述各电警设备的位置,和所述目标区域的路网拓扑数据指示的各道路交叉口的位置进行融合,从部署在所述目标区域内的各电警设备中筛选出部署在所述目标区域的各道路交叉口的各目标电警设备,具体包括:
25、从所述车牌识别数据中获取各电警设备在所述目标区域内的第一位置;
26、从所述目标区域的路网拓扑数据中提取所述目标区域内各道路交叉口在所述目标区域内的第二位置;
27、根据所述各电警设备在所述目标区域内的第一位置,以及所述各道路交叉口在所述目标区域内的第二位置,确定所述各电警设备和所述各道路交叉口之间的距离;
28、根据所述各电警设备和所述各道路交叉口之间的距离,确定部署在所述目标区域的各交叉口的目标电警设备。
29、可选地,根据所述各目标电警设备在所述目标区域内的位置,以及所述车牌识别数据中各车牌的被检测时间,确定所述各车牌号分别对应的各出行轨迹,具体包括:
30、从所述车牌识别数据中获取各车牌号以及所述各车牌号分别被所述各电警设备检测的被检测时间;
31、针对每个车牌号,将该车牌号被所述各电警设备检测的各被检测时间进行排序,得到该车牌号对应的被检测时间序列;
32、根据该车牌号对应的被检测时间序列包含的各被检测时间,确定该车牌号对应的被检测时间序列中相邻两个被检测时间之间的时间间隔,并将时间间隔大于预设时间间隔阈值的相邻两个被检测时间之间设置出行链断点;
33、根据该车牌号对应的被检测时间序列中设置的各出行链断点,将该车牌号对应的被检测时间序列分割为该车牌号对应的多个被检测时间子序列;
34、根据该车牌号对应的各被检测时间子序列分别包含的各被检测时间,以及所述各被检测时间对应的目标电警设备在所述目标区域内的位置,确定该车牌号对应的多个出行轨迹。
35、可选地,对位于所述目标区域内的各起讫点对进行轨迹补全,得到所述各起讫点对之间的轨迹,具体包括:
36、根据所述各起讫点对,基于最短路算法生成所述各起讫点对之间的各最短路径,并将所述各最短路径加入所述各起讫点对的出行轨迹集中;
37、基于所述各起讫点对之间的各最短路径进行仿真,确定所述各最短路径在各时间步的平均行程时间;
38、基于所述各最短路径在各时间步的平均行程时间,使用gawron算法更新所述各起讫点对的出行轨迹集中的各路径的行程时间;
39、根据所述各路径的行程时间,更新所述各起讫点对之间的最短路径,再次仿真并使用所述gawron算法更新出行轨迹集中的各路径的行程时间,重复此步骤,直到所述各起讫点对的最优轨迹收敛不再改变,或迭代更新次数达到预设次数;
40、将所述各起讫点对之间的最优轨迹作为所述各起讫点对之间的轨迹。
41、可选地,所述待标定参数为速度因子;
42、根据所述待标定的交通仿真模型仿真得到的所述各起讫点对之间的仿真行程时间,与所述各起讫点对之间的实际行程时间之间的差异,对所述待标定参数进行标定,得到目标参数,具体包括:
43、将仿真时段分割为预设数量的时间阶段;
44、初始化各时间阶段的速度因子;
45、针对每个时间阶段,通过所述待标定的交通仿真模型,运行仿真得到该时间阶段内所述各起讫点对之间的各轨迹分别对应的仿真行程时间;
46、根据该时间阶段内所述各起讫点对之间的各轨迹分别对应的仿真行程时间,确定该时间阶段对应的平均仿真行程时间;
47、根据所述车牌识别数据,确定该时间阶段内所述各起讫点对之间各轨迹分别对应的实际行程时间,并确定该时间阶段对应的平均实际行程时间;
48、根据该时间阶段对应的平均仿真行程时间和该时间阶段对应的平均实际行程时间之间的差异,以及预设的该时间阶段的误差阈值,标定该时间阶段对应的速度因子,直到该时间阶段对应的平均仿真行程时间和该时间阶段对应的平均实际行程时间之间的差异满足预设条件;
49、将标定后的各时间阶段对应的速度因子作为目标参数。
50、本说明书提供了一种大规模微观交通仿真装置,包括:
51、路网拓扑数据获取模块,用于获取目标区域的路网拓扑数据,所述路网拓扑数据用于表征所述目标区域的路网结构以及所述目标区域内道路的属性信息;
52、起讫点确定模块,用于获取车牌识别数据,并将所述车牌识别数据和所述目标区域的路网拓扑数据进行融合,得到位于所述目标区域内的多个起讫点对;
53、轨迹补全模块,用于对位于所述目标区域内的各起讫点对进行轨迹补全,得到所述各起讫点对之间的轨迹;
54、交通仿真模型建立模块,用于获取预设的仿真参数和待标定参数,根据所述预设的仿真参数、所述待标定参数、所述目标区域的路网拓扑数据以及所述各起讫点对之间的轨迹建立待标定的交通仿真模型;
55、标定模块,用于根据所述待标定的交通仿真模型仿真得到的所述各起讫点对之间的仿真行程时间,与所述各起讫点对之间的实际行程时间之间的差异,对所述待标定参数进行标定,得到目标参数,并根据所述目标参数和所述待标定的交通仿真模型,得到标定后的交通仿真模型;
56、执行模块,用于根据标定后的交通仿真模型,执行所述目标区域内的交通仿真任务。
57、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述大规模微观交通仿真方法。
58、本说明书提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述大规模微观交通仿真方法。
59、本说明书采用的上述至少一个技术方案能够达到以下有益效果:
60、本说明书提供的大规模微观交通仿真方法中,将用于表征目标区域路网结构和道路的属性信息的路网拓扑数据与车牌识别数据进行融合,得到目标区域内的全样本机动车出行起讫点对,对各起讫点对进行轨迹补全,得到各起讫点对之间的轨迹,基于预设的仿真参数、待标定参数、路网拓扑数据和各起讫点对之间的轨迹建立交通仿真模型,进而,根据交通仿真模型仿真得到各起讫点对之间的仿真行程时间,与各起讫点对之间的实际行程时间进行比较得到两者之间的差异,对待标定参数进行标定得到目标参数,从而得到标定后的交通仿真模型,以便基于标定后的交通仿真模型执行交通仿真任务。可见,基于车牌识别数据和路网拓扑数据这两种容易获取的数据和本说明书提出的路径补全算法及仿真标定算法构建交通仿真模型,在构建微观交通仿真模型的同时,降低了微观仿真数据的获取难度,从而提高了微观交通仿真模型的构建效率。
- 还没有人留言评论。精彩留言会获得点赞!