一种相机阵列标定装置及其使用方法与流程
本发明涉及数字化测量设备,特别是涉及一种相机阵列标定装置及其使用方法。
背景技术:
1、在飞机整机装配完成之后,需要对飞机外形、水平测量点进行测量,由于飞机尺寸较大,需要搭建多层、多相机的阵列测量场,测量场相机标定分为内参与外参标定,内参标定可通过传统标定方法逐个完成,对于外参标定通常采用标定板对相机逐个“链式标定”,但对于夹角较大的相机由于可视性等影响导致出现标定误差较大,甚至无法标定的现象。
2、现有技术中,提出了公开号为cn108765494a,发明名称为“一种基于圆柱体标定物的多相机标定方法”的发明专利,以及公开号为cn106780624a,发明名称为“一种基于参照物的多相机标定方法及装置”的发明专利,上述技术方案提出了的标定装置,能够同时标定多台相机,但是其相机间外参根本上还是依靠相邻相机对相同区域成像进行标定,无法解决大夹角相机的标定,如拍摄方向相反的相机的标定。
3、现有技术中,提出了公开号为cn114549651a,发明名称为“一种基于多面体几何约束的多个3d相机标定方法和设备”的发明专利,提出了一种基于多面体的标定方法,能够不依靠同一区域成像对相机外参进行标定,但这种方法需要引入深度相机获取多面体表面点云,深度相机与普通相机之间还需进行外参标定,带来硬件成本增加、标定误差积累以及效率低的问题;且无法对相机内参进行标定,需要额外的标定装置。
技术实现思路
1、为解决上述技术问题,本发明提出了一种相机阵列标定装置及其使用方法,能有效解决现有技术中标定误差较大,甚至无法标定的问题。
2、本发明是通过采用下述技术方案实现的:
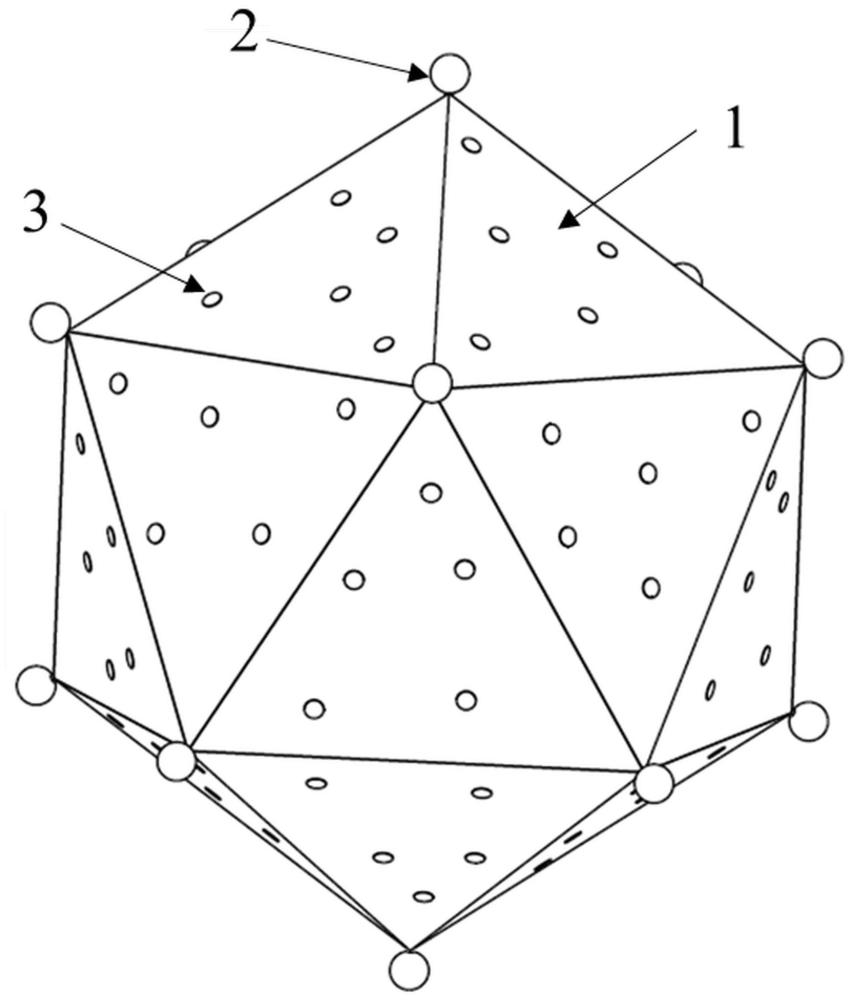
3、一种相机阵列标定装置,包括标定装置主体、反光球以及标志点;所述标定装置主体呈正二十面体,所述标定装置主体的每个面上随机粘贴有n个标志点,n≥3,n个标志点不能共线或者重叠;所述标志点为反光标志点,其直径为d1,标志点离标定装置主体的棱边距离大于0.5d1;所述反光球安装在标定装置主体的顶点上,包括d2和d3两种直径规格,d2=2d1,d3=3d1;
4、所述标志点的直径d1满足下式:
5、
6、式中,l为相机标定距离,f为镜头焦距,μ为单像素尺寸;
7、所述标定装置主体的边长m满足下式:
8、
9、一种相机阵列标定装置的使用方法,包括以下步骤:
10、步骤s1.单相机内参标定,具体包括:
11、步骤s11.获取反光球世界坐标,即任意选定1个顶点安装直径为d2的反光球,在与该顶点相连的5条棱边的其他顶点按顺序分别安装一个直径为d3反光球以及四个直径为d2的反光球;将标定装置固定,获取这6个反光球球心空间坐标;
12、步骤s12.提取反光球区域,
13、步骤s13.根据步骤s12中的反光球区域,获取反光球像素坐标,
14、步骤s14.以步骤s11中得到的反光球的坐标作为世界坐标系下的坐标,以步骤s13中得到的反光球的坐标作为像素坐标系下坐标,解算出相机内参与步骤s11所用坐标系下的相对外参;
15、步骤s2.小夹角相机相对外参标定,包括:
16、步骤s21.单相机外参计算,
17、步骤s22.相机间相对外参计算;
18、步骤s3.大夹角相机相对外参标定,包括:
19、步骤s31.标定前准备,即拆除步骤s11安装的直径为d3的反光球,在其余所有角点上安装直径为d2的反光球;将标定装置放置于两两相对的4个相机视场公共区,并同时拍摄图片;
20、步骤s32.平面上标志点提取;
21、步骤s33.公共点坐标计算;
22、步骤s34.相对外参计算。
23、所述步骤s12具体指:将标定装置主体放置于待标定相机前,使步骤s11中所述6个反光球均能被待标定相机拍摄到,将得到的图片进行二值化操作,提取面积最大的6个区域,即为6个反光球区域。
24、所述步骤s13具体指:
25、分别计算s12中得到的6个反光球区域的质心坐标,按顺序分别为(ui,vi),其中i=1,2,...,6;按下式计算得到中间点,设其坐标为(u1’,v1’):
26、
27、提取步骤s12中面积最大反光球区域的质心坐标,以该坐标作为起点,绕(u1’,v1’)沿顺时针依次排序,得到点序列(ui’,vi’),其中i=1,2,...,6。
28、所述步骤s21具体指:将步骤s11中的标定装置,放置于小夹角相机对视场交汇区域,保证两相机均能拍摄到步骤s11中所述的6个反光球,按步骤s11~步骤s14中方法分别得到两个相机在步骤s11所用坐标系下的相对外参r1、t1与r2、t2。
29、所述步骤s22具体指:使用以下方法计算两相机相对外参r与t:
30、
31、
32、所述步骤s31具体指:在使用步骤s2完成所有小夹角相机相对外参标定后,拆除步骤s11安装的直径为d3的反光球,在其余所有顶点上安装直径为d2的反光球;将标定装置放置于两两相对的4个相机视场公共区,并同时拍摄图片。
33、所述步骤s32具体指:在步骤s2中已经获取一侧相邻相机间相对外参,利用双目视觉定位原理,得到反光球球心空间坐标以及标志点空间坐标集合a;设集合a中与单侧任一相机距离最小的点为p1,利用几何关系提取p1相邻的5个面上的标志点坐标;同理对另一侧相机获得的图像执行相同的步骤,获取在另一侧相机视角下的标志点坐标。
34、所述步骤s33具体指:利用步骤s32提取的标志点,使用平面拟合方法分别拟合同一侧出5个平面方程,联立5个平面方程,采用最小二乘法解出交点坐标q=(xp,yp,zp),设5个平面朝面内方向的单位法向量分别为e1、e2、e3、e4、e5,按下式计算公共点坐标k;同理对另一侧获得的图像执行相同的步骤,获取在另一侧视角下的公共点坐标k’;
35、
36、所述步骤s34具体是指,在满足步骤s31条件的情况下,随机调整l次(l≥3)标定装置位置及姿态,执行步骤s32与步骤s33,获取l组公共点坐标k与k’,组成齐次矩阵k与k’,即下式所示:
37、
38、再利用下式计算两两相对的4个相机场之间成像坐标系间的相对外参矩阵mr,完成外参标定:
39、mr=(ktk)-1ktk′。
40、与现有技术相比,本发明的有益效果表现在:
41、1、本发明的适用性更广,能够实现对无法拍摄到同一特征区域的相机进行外参标定,外参标定时可在任何角度拍摄本发明的标定装置。
42、2、本发明标定精度高,标定过程采用多点拟合、多面相交的算法,减小了标定装置本身误差的影响。
43、3、本发明操作更高效,相比传统棋盘格标定方法,在外参标定过程本发明中的标定装置可在任意方向成像,无需特意调整方向。
- 还没有人留言评论。精彩留言会获得点赞!