一种属性增强的感知时序图卷积网络交通速度预测方法与流程
本发明涉及智能交通领域,特别是涉及一种属性增强的感知时序图卷积网络交通速度预测方法。
背景技术:
1、在智能交通系统中,准确的交通状况预测具有重要意义。为了缓解城市道路的拥堵,交通信号灯需要通过预测的交通参数,如路口速度、流量和路口转弯比等,自适应地生成交通信号。作为重要的参数之一,道路速度的预测质量严重影响智能交通控制的性能。除了交通信号灯的控制之外,准确的道路速度预测在自动驾驶、预计到达时间等领域中也发挥着重要作用。
2、在一定程度上,交通参数的数据收集方法是否高效,会影响数据分析的结果。随着v2x网络基础设施的不断完善,部署在道路和车辆上更多的实时传感器,例如回路检测器和车载单元,可以方便地将各种数据以低延迟上传到云端进行进一步的处理。实际上,尽管已经实现了相关静态或动态数据的获取,但由于综合的路网结构和顺序周期性,精确预测上述参数仍然是一个很大的挑战。由于道路之间的连通性,相邻道路发生的动态变化会不断影响目标道路。此外,基于先验知识,未来的交通状况高度依赖于历史状态和特定周期性。因此,在考虑计算能力的前提下,预测模型从现实世界中收集的时间序列数据中提取时空关系和周期性是至关重要的和必要的。
3、针对这个问题,解决方法可以分为两类:基于模型的方法和数据驱动的方法。现有模型大多数尝试使用深度学习技术来捕获流量行为模式。其中,循环神经网络(rnn)及其变体、门控循环单元(gru)和长短期记忆(lstm)通常用于提取时间依赖性,图神经网络(gnn)及其变体通常用于理解空间依赖性。随着注意力机制的发展,它在特征相关性提取方面已被证明是有效的,在周期性交通行为预测中具有巨大的应用潜力。
4、申请号为202210179481.1的发明专利申请公开一种融合时空注意力神经网络和交通模型的交通流预测方法,将深度学习中的神经网络模型与交通仿真进行有效融合,在进行交通流量预测时不止运用到了节点的流量特征,同时也考虑到了节点的速度特征,并经由交通仿真模型将速度特征转换成流量特征。此外,一些外部要素包括天气、地域因素等也会对交通特性产生影响,如何有效利用外部因素条件帮助时序预测也成为了预测算法设计的挑战之一。
技术实现思路
1、本发明主要解决的技术问题是提供一种属性增强的感知时序图卷积网络交通速度预测方法,充分利用外部因素条件,提升预测效能。
2、受益于深度神经网络的发展,在空间和时间依赖性捕获方面取得了巨大的进展。对于时间关系提取,gru和lstm已被广泛用于处理大量流量数据集并表现出良好的预测能力。它们都是rnn网络的成功变体,并且具有相似的结构,可以根据最近的几个步骤推导出未来的状态。而gru由于其结构比lstm更简单,并且可以在一定程度上避免梯度消失问题而受到更多关注。
3、对于空间关系提取,cnn和gnn被广泛使用。cnn在欧几里得数据上表现出稳定的性能,例如图像和视频识别。由于交通数据是非欧几里得数据的形式,cnn无法很好地处理它们。因此,gnn在处理交通网络空间依赖性提取时引起了更多关注。此外,图卷积网络(gcn)通过考虑节点之间的连接性而得到广泛应用。
4、此外,随着注意力机制吸引了更多的研究人员,类似transformer的框架,例如informer,被应用于解决长序列预测问题,流量预测问题也不例外。注意力机制的原理是计算每对输入元素之间的相关性,并尝试从样本中找到最相关的一对来进行预测。一些研究成功地尝试将注意力机制集成到一些简洁的神经网络中,而不是直接应用类似transformer的架构,因为结构复杂且计算时间较长。代表性模型包括图注意力网络(gat)和双重注意力网络(danet)。
5、为解决上述技术问题,本发明采用的一个技术方案是:提供一种属性增强的感知时序图卷积网络交通速度预测方法,包括以下步骤:
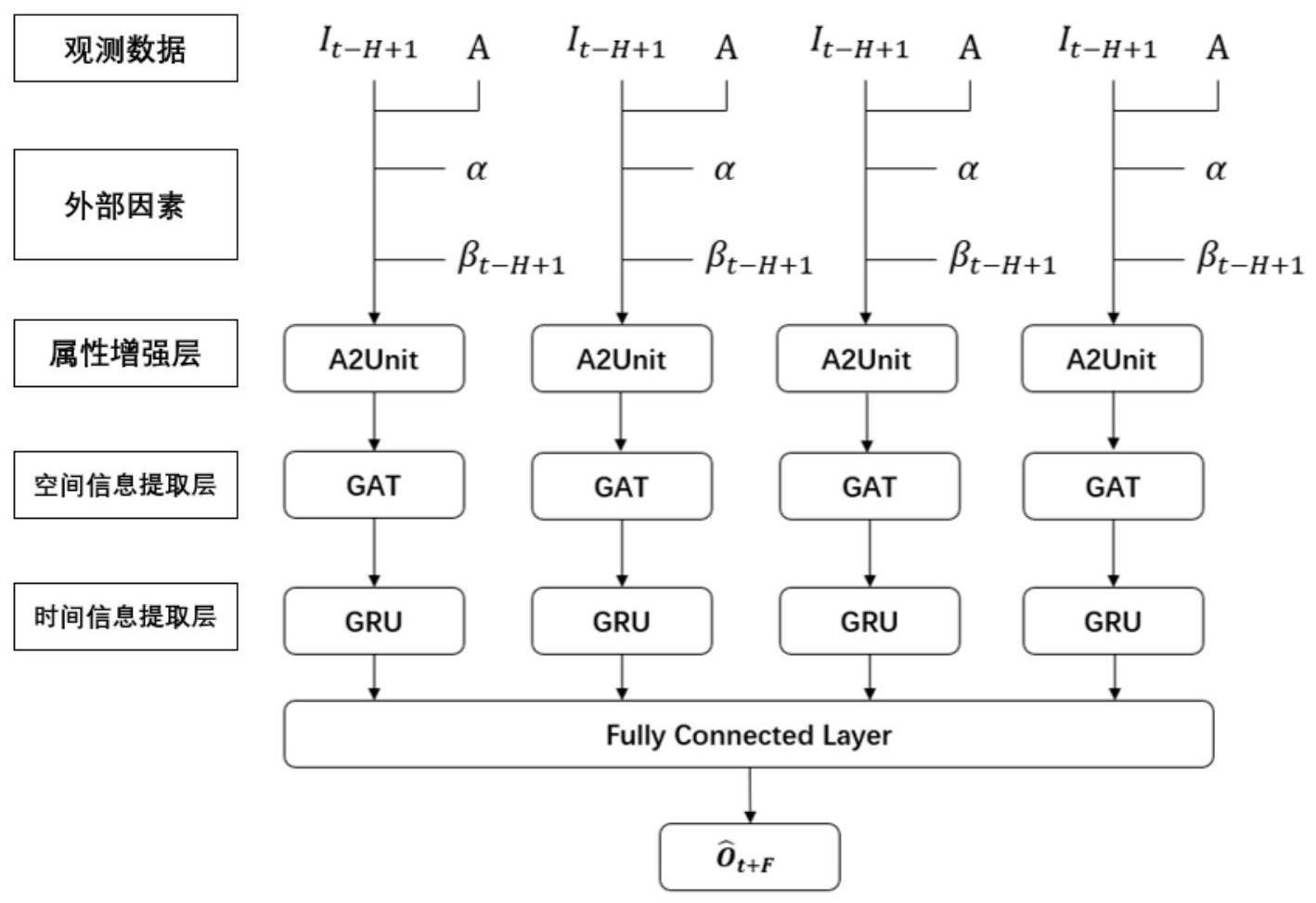
6、步骤1,向属性增强的感知时序图卷积网络中输入交通路网的速度数据ii、邻接矩阵g、静态外部信息α和动态外部信息β,属性增强的感知时序图卷积网络包括属性增强层、空间信息提取层、时间信息提取层和全连接层;
7、步骤2,将速度数据和动态外部信息按照时间分别划分为{iit-h+1,…,iit}和{βt-h+1,…,βt};
8、步骤3,将所有数据划分为训练集和测试集;
9、步骤4,将训练集数据输入网络,利用属性增强层中的属性增强单元对速度数据ii、邻接矩阵g、静态外部信息α和动态外部信息β进行处理整合,在t时刻,获得输出ei=[{iit-h+1,…,iit},α,βt-h+1,…,βt];
10、步骤5,选择gat单元作为基于注意力的空间信息提取层来考虑网络连接关系,gat架构中,每一节点代表一条道路,根据邻接矩阵可知每个节点的连接情况,某节点对邻接节点的感知系数记为αij;
11、节点与的注意力参数可由以下方法计算:
12、
13、其中是可训练的加权矩阵,r是指实数,是输出特征的数量,在这个过程中,邻接矩阵也被用作注意力系数计算的滤波器,即只考虑连通对,经过激活函数和归一化后,完整的注意力机制可以表示为以下公式1:
14、
15、其中,是与点a连接的点,||是串联运算,通过系数表示两个数据收集位置之间的相关性;
16、为了找到每个点的最终输出特征,平均结果为以下公式2:
17、
18、空间信息提取层通过gat单元对属性增强单元整合后的整合信息进行空间依赖性提取,输出信息提取后的特征矩阵,将每条道路视为一个节点,对于节点初始信息为ei,每个节点根据与相邻节点的感知计算相邻节点的注意力系数,对于某一节点,使用公式1计算与之相邻的所有节点的感知系数,而后通过公式2更新本节点信息作为输出,最终所有节点输出拼接作为gat单元的输出,即时间信息提取层中gru单元的输入xt;
19、步骤6,将特征矩阵输入时间信息提取层,通过gru单元对特征矩阵进行时序信息提取,gru单元结合当前输入xt和上一个节点传递下来的隐状态ht-1计算重置门r,更新门z的输出:
20、r=σ(wrxt||ht-1)
21、z=σ(wzxt||ht-1)
22、其中σ为sigmoid函数,wr和wz分别为两个参数矩阵,根据重置门计算重置数据ht′-1:
23、ht′-1=ht-1⊙r
24、并计算候选状态h′,其中w为参数矩阵:
25、h′=tanh(wxt||ht′-1)
26、更新当前时间点隐状态ht:
27、ht=(1-z)⊙ht-1+z⊙h′
28、步骤7,将gru单元计算的特征数据进行拼接,作为全连接层的输入;
29、步骤8,全连接层计算最终网络输出结果,即预测速度值;
30、步骤9,重复步骤4到8,将训练集数据依次输入属性增强的感知时序图卷积网络,计算输出,根据网络输出计算损失,进行模型更新学习,直到迭代次数上限或损失足够小,则结束训练,得到训练好的模型;
31、步骤10,实际应用中,将实时观测数据,包括速度数据以及外部信息数据连同邻接矩阵一起输入训练好的模型,模型输出值即为速度预测值。
32、在本发明一个较佳实施例中,道路的拓扑结构用图g={p,c,a}来表示,每个数据采集位置为一个点,p为点集,c为连通边集,a是包含整个路网空间依赖关系的邻接矩阵,为了构造邻接矩阵,每两个节点之间分配0和1的元素,0表示两个节点断开连接,1表示两个位置连接。
33、在本发明一个较佳实施例中,包含p个点的个历史属性的特征矩阵表示为其为ii∈rp×f。
34、在本发明一个较佳实施例中,将外部因素的影响视为附属属性矩阵m,构造一个属性矩阵[m1,m2,…,ml],其中l为外部属性的维度信息,在时间t,第j个外部因素矩阵mj=[jt-h+1,…,jt],通过反射函数f来预测未来f步链路速度参数
35、
36、在本发明一个较佳实施例中,利用属性增强层将静态外部信息α和动态外部信息β整合并做信息增强,一个有n种要素的静态要素矩阵表示为α∈rp×n,其中α是不变的。
37、在本发明一个较佳实施例中,通过β∈rp×(w*t)表示w个不同的时变的动态要素。
38、本发明的有益效果是:本发明指出的一种属性增强的感知时序图卷积网络交通速度预测方法,同时考虑时空信息和周期性,提出了一种包含空间信息提取层、时间信息提取层的时序预测深度模型来提取时空信息,并具有更好的性能,从流量数据集中了解周期性模式,并考虑了静态与动态两种外部因素,提出了状态预测的外部因素利用方案,通过对外部因素的利用,提升模型对数据时序性的感知,从而提高模型的预测效能。
- 还没有人留言评论。精彩留言会获得点赞!